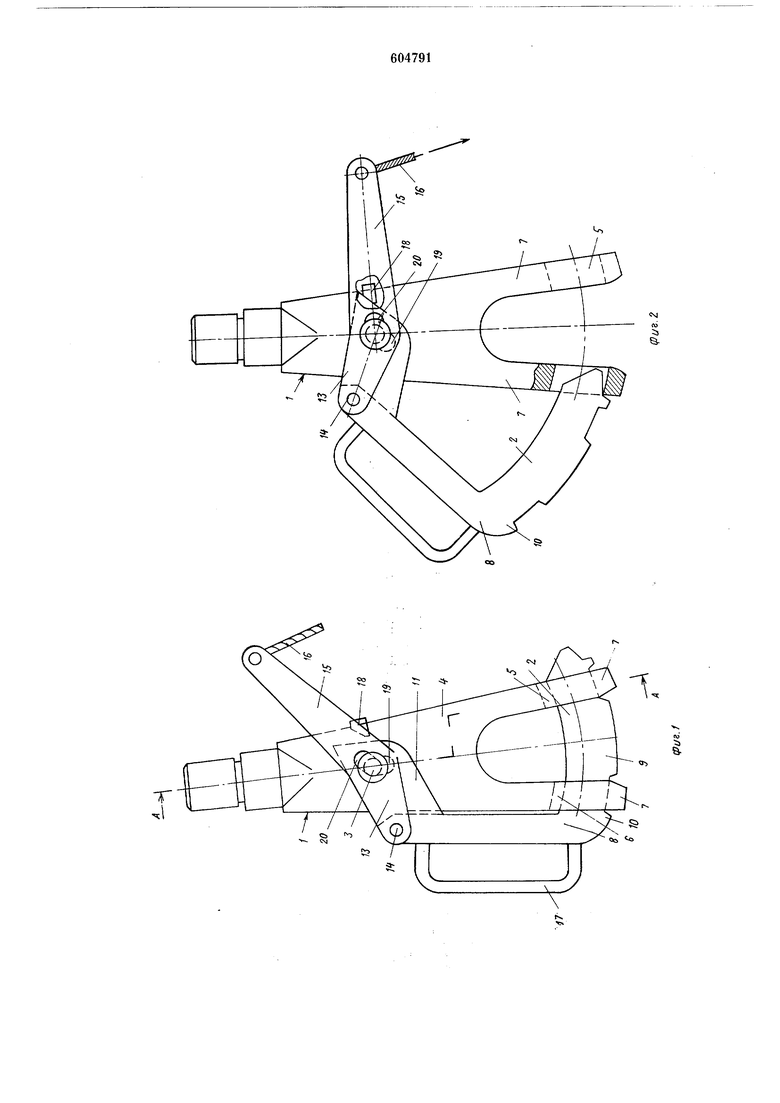
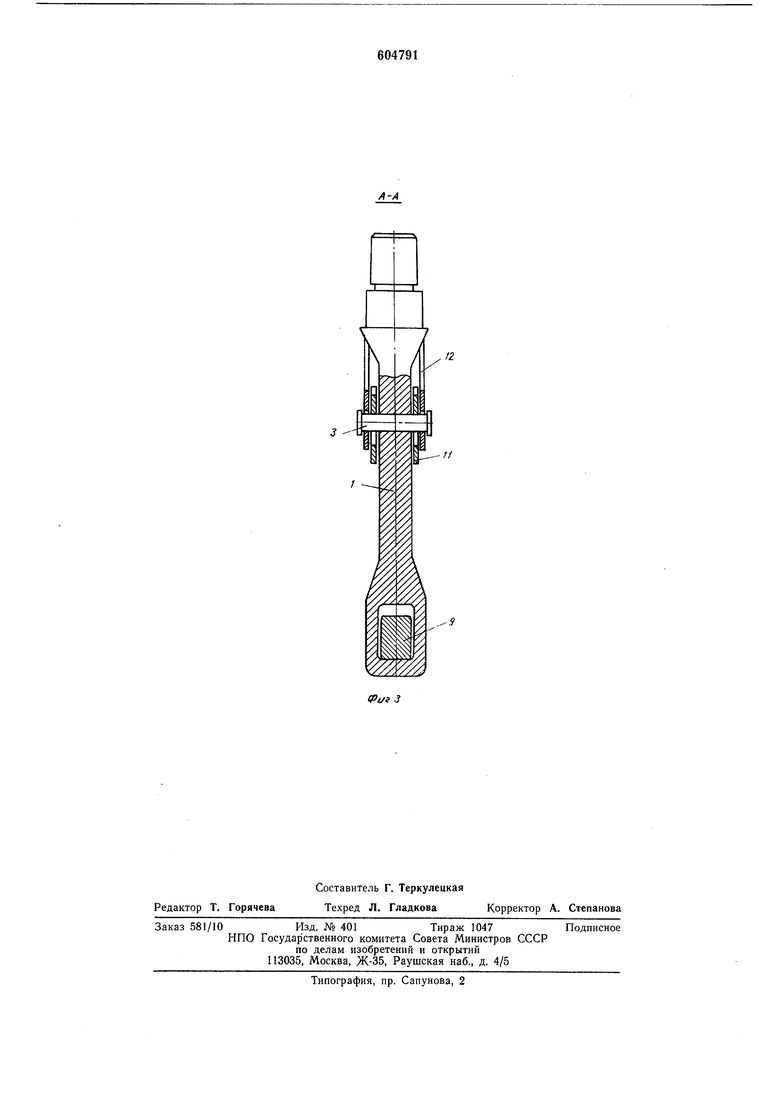
Рычаг 12 закреплен на вилке 4 пальцем 3, на рычаге 8 закреплена ручка 17. На вилке в верхней чаети установлен ограничитель 18 для ограничения поворота рычага 12. На планках 11 и рычаге 12, в месте их соединения с помощью пальца 3 с вилкой 4, имеются овальные отверстия 19 и 20.
Захват для подъема грузов работает следующим образом.
Перед подъемом груза рычаг 8 запорного элемента 2 посредством ручки 17 выводят из отверстий 5 и 6 на расходящихся концах 7 вилки 4 до упора двуплечего рычага 12 в ограничитель 18. При этом двуплечий рычаг 12 свободно перемещается на пальце 3.
Грузовой строп или петлю от груза располагают между расходящимися концами 7 вилки, носле чего рычаг 8 запорного элемента 2 посредством ручки 17 поднимают. Нрн этом выступ 10 опорной балки 9 поднимается, а затем балку 9 вводят в отверстия 5 и 6 расходящихся концов 7 вилки 4 под грузовыми стропами или петлей груза, фиксируя таким образом положение их в захвате.
При расстроповке грузов в ручном работы операции проводят такие же, как описана работа подготовки захвата к зацеплению со стропами или петлей перед подъемом грзза. При этом необходимо ослабить натяжение стропов или петли.
Нри расстроповке грузов в полуавтоматическом режиме усилие прикладывают через гибкую тягу 16 на двуплечий рычаг 12, который посредством овального отверстия 20 перемещается на пальце 3 и передает усилие в вертикальном направлении, а потом вокруг
оси 14 на рычаг запорного элемента 2. Запорный элемент 2 поворачивается на пальце 3 до упора плеча 15 в ограничитель 18 угла поворота. Рычаг 8 выходит из отверстий 5 и 6 расходящихся концов 7, освобождая при этом стропы или петлю.
Формула изобретения
1. Захват для подъема грузов, содержащий нодвеску, выполненную в виде вилки с расходящимися концами, навещиваемую на грузоподъемное устройство, запорный L-образный элемент с упором в месте изгиба, шарнирно установленный в верхней части вилки с возможиостью перемещения в вертикальной плоскости и взаимодействующий с расходящимися концами вилки, и механизм перемещения запорного элемента, отличающийс я тем, что, с целью повышения грузоподъемности захвата, вилка выполнена монолитной с квадратными отверстиями на расходящихся концах, а запорный элемент в верхней части выполнен с двумя планками, охватывающимн вилку с двух сторон.
2. Захват по п. 1, отличающийся тем, что механизм перемещения запорного элемеита выполнен в виде двуплечего рычага, одно плечо которого соединено с запорным
элементом, а другое - с гибкой тягой.
Нсточники информации, принятые во внимание при экспертизе 1. Зайцев Л. В. и др. Автомобильные краны. М., Высшая школа, 1971, с. 292-294.
2. Патент Франции № 2263189, кл. В 66с 1/34, 03.10.75.
«41
со
:з
&
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство В.К.Петрова | 1980 |
|
SU950654A1 |
| Грузозахватная траверса | 1978 |
|
SU765186A1 |
| Захватное устройство для штучных грузов | 1989 |
|
SU1765096A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2031071C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1986 |
|
SU1398303A1 |
| ТРАВЕРСА ДЛЯ БИГ-БЕГОВ С АВТОМАТИЧЕСКОЙ РАССТРОПОВКОЙ | 2024 |
|
RU2834112C1 |
| УНИВЕРСАЛЬНОЕ ГРУЗОПОДЪЕМНОЕ ПРИСПОСОБЛЕНИЕ | 2009 |
|
RU2406678C1 |
| Захват для контейнеров | 1980 |
|
SU956410A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ РАССТРОПОВКИ ГРУЗА | 2003 |
|
RU2267456C2 |
| Замок для стропа | 1983 |
|
SU1197976A1 |
2
