(54) ДАТЧИК СКОЛЬЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ
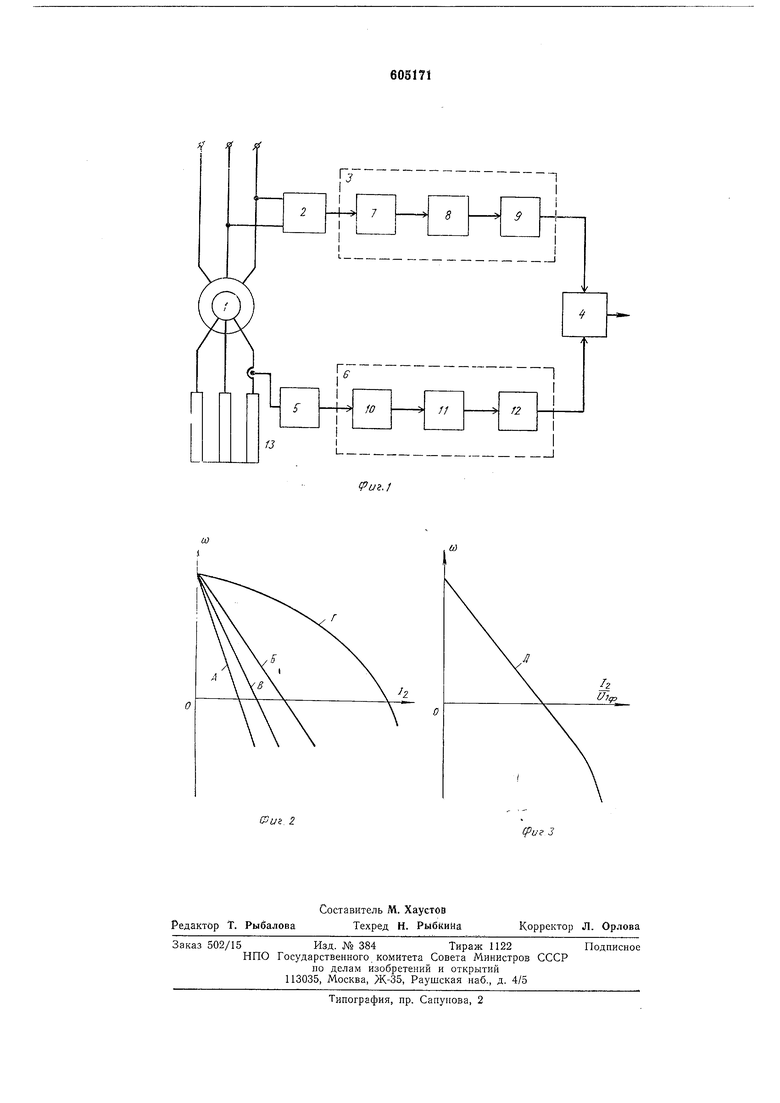
к роторной цепи двигателя 1 датчик 5 тока последовательно через усилитель-преобразователь 6 связан с вторым входом блока 4 деления.
Усилители преобразователи 3 и 6 содержат последовательно включенные фильтр 7 нижних частот, выпрямитель 8, фильтр 9 нижних частот и фильтр 10 нижних частот, выпрямитель 11 и фильтр 12 нижних частот соответственно. Дополнительные сопротивления 13 подсоединены к зажимам обмотки ротора.
Датчик скольжения работает следующим образом.
При работе асинхронного двигателя в какой-либо системе электропривода напряжения на зажимах статора и токи в цепи ротора в общем случае имеют несинусоидальную форму. В этом случае на выходе фильтра 7, не пропускающего высщие гармоники напряжения статора, выделяется первая гармоника этого напряжения, которая с помощью выпрямителя 8 и фильтра 9 преобразуется в напряжение постоянного тока, подаваемое па один из входов блока 4 деления. Аналогично фильтр 10 выделяет первую гармонику выходного сигнала датчика 5 тока ротора, который далее с помощью выпрямителя И и фильтра 12 преобразуется в напряжение постоянного тока, поступающее с выхода усилителя-преобразователя 6 на другой вход блока 4 деления.
В блоке 4 деления осуществляется деление сигнала, пропорционального току ротора, на сигнал, пропорциональный напряжению статора. При этом выходной сигнал блока деления не зависит от величины напряжения статора при ее изменении в широких пределах, а определяется только параметрами обмоток асинхронного двигателя и его скольжением.
Для пояснения сказанного рассмотрим характеристики, приведенные на фиг. 2 и 3. Характеристики А, Б и В на фиг. 2 представляют собой скоростные характеристики асинхронного двигателя, соответствующие различным напряжениях на зажнмах статора при одинаковых добавочных сопротивлениях в цепи ротора. Эти характеристики в значительной зоне изменения скольжения являются линейными, причем линейный участок тем больше.
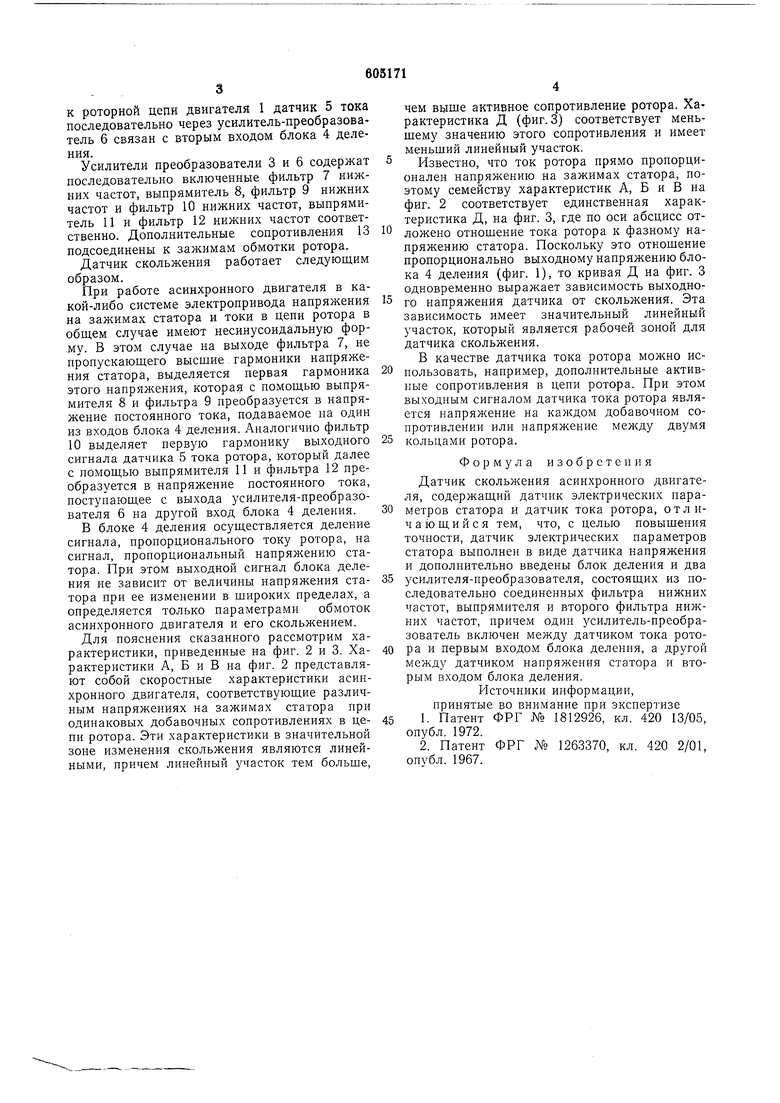
чем выше активное сопротивление ротора. Характеристика Д (фиг. 3) соответствует меньщему значению этого сопротивления и имеет меньший линейный участок.
Известно, что ток ротора прямо пропорционален напряжению на зажимах статора, поэтому семейству характеристик А, Б и В на фиг. 2 соответствует единственная характеристика Д, на фиг. 3, где по оси абсцисс отложено отношение тока ротора к фазному напряжению статора. Поскольку это отношение пропорционально выходному напряжению блока 4 деления (фиг. 1), то кривая Д на фиг. 3 одновременно выражает зависимость выходного нанряжения датчика от скольжения. Эта зависимость имеет значительный линейный участок, который является рабочей зоной для датчика скольжения.
В качестве датчика тока ротора можно использовать, например, дополнительные активные сопротивления в цепи ротора. При этом выходным сигналом датчика тока ротора является напряжение на каждом добавочном сопротивлении или напряжение между двумя кольцами ротора.
Формула изобретения
Датчик скольжения асинхронного двигателя, содержащий датчик электрических параметров статора и датчик тока ротора, отличающийся тем, что, с целью повышения точности, датчик электрических параметров статора выполнен в виде датчика напряжения и дополнительно введены блок деления и два усилителя-преобразователя, состоящих из последовательно соединенных фильтра нижних частот, выпрямителя и второго фильтра нижних частот, причем один усилитель-преобразователь включен между датчиком тока ротора и первым входом блока деления, а другой между датчиком напряжения статора и вторым входом блока деления.
Источники информации, принятые во внимание при экспертизе
1.Патент ФРГ № 1812926, кл. 420 13/05 опубл. 1972.
2.Патент ФРГ № 1263370, кл. 420 2/01, опубл. 1967.
1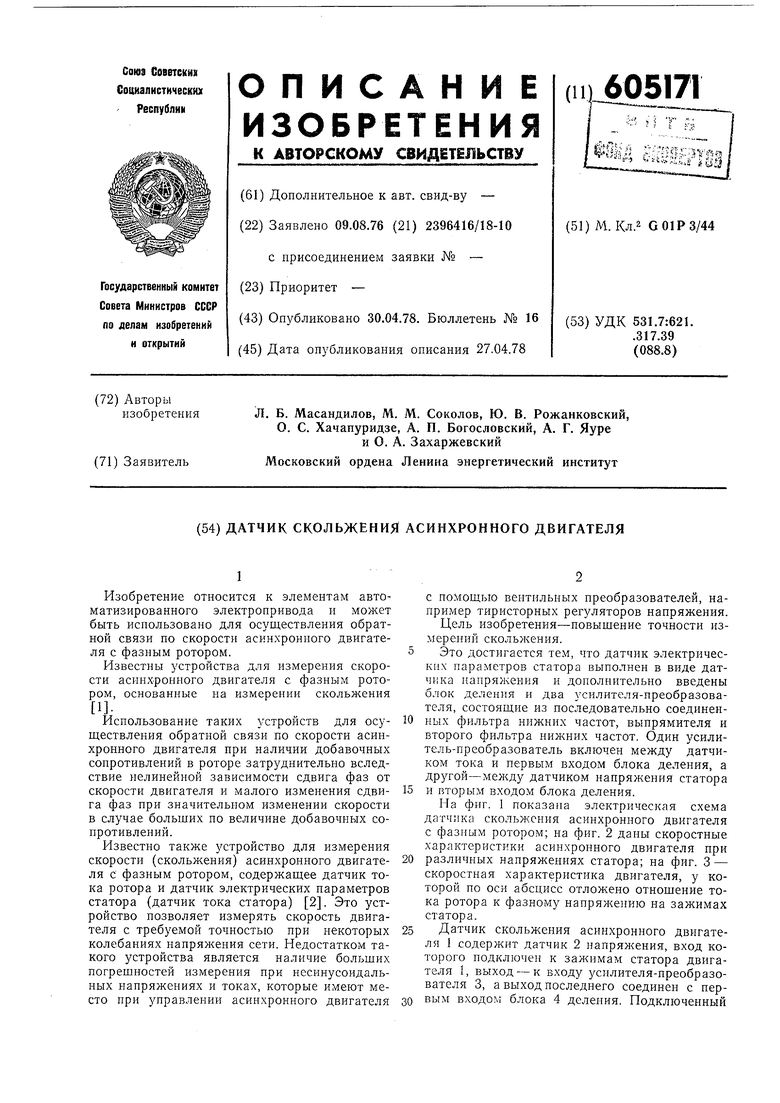
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации скорости вращения асинхронного двигателя с управляемым преобразователем | 1977 |
|
SU699640A1 |
| Устройство для измерения скольженияАСиНХРОННОгО дВигАТЕля C фАзНыМРОТОРОМ | 1979 |
|
SU849402A1 |
| Электропривод переменного тока | 1990 |
|
SU1758821A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
| Устройство для измерения скольженияАСиНХРОННОгО дВигАТЕля C фАзНыМ POTOPOM | 1979 |
|
SU838563A1 |
| Устройство для измерения скольженияАСиНХРОННОгО дВигАТЕля C фАзНыМ POTOPOM | 1979 |
|
SU824056A1 |
| Система частотно-регулируемого асинхронного электропривода крано-манипуляторной установки (Система ЧРАП КМУ) | 2023 |
|
RU2820159C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |