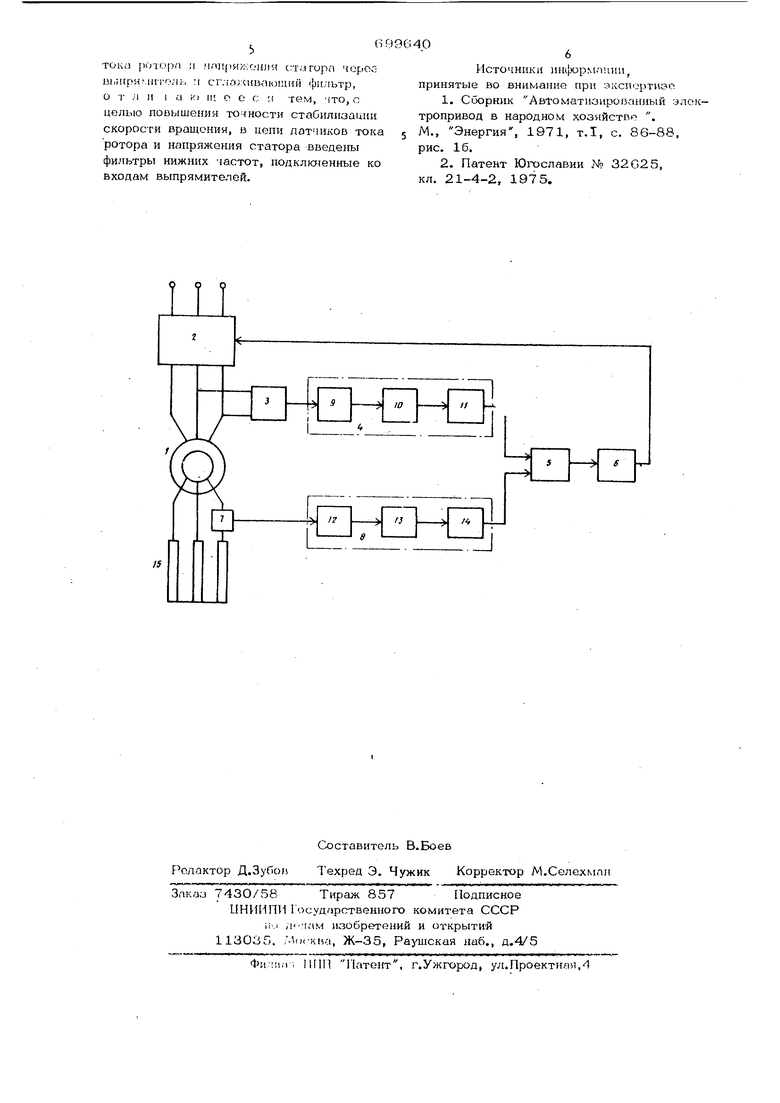
Изобретение относится к области электропривода и может быть использовано для создания автоматизированного электропривода с асинхронным двигателем. Известно устройство для стабилизации скорости двигателя с управляемым преобразователем, содержащее блок управления преобразователем, интегратор, сумматор, вход которого соединен с выходом тахо- генератора и блоком задания скорости {1 Недостатком устройства является сложность конструкции. Наиболее близким техническим решением к изобретению является устрюйство для стабилизации скорости вращения асинхрон- ного двигателя, соаёржащее регулятор напряжения в цепи статора,последовательно соединенные блок управления регулятором, интегратор и блок сравнения, вход которого связан с выходом датчика тока ротора и напряжения статора через выпрямитель и сглаживающий фильтр 2 , Недостатком устройства явлйется наличие в сигнале от датчиков тока и напряжения высших гармоник, что создает значительную ошибку в стабилизации скорости. Цель изобретения - повышение точности стабилизации скорости вращения асннхронного двига еля. Поставленная цель достигается тем, что устройство снабжено фильтрами низких частот, подключенными ко входам выпрямителей. На чертеже .приведена схема устройства для стабилизации скорости асинхронного двигателя 1 с фазным ротором, питаемого от регулятора напряжения 2. и содержит датчик 3 напряхсения статора, вход которого подключен к зажимам статора двигателя 1, выход ко входу усилителя-преобразователя 4, выход усилителя 4 соединен с первым входом блока 5 сргшнения, выход блока 5 соединен со входом интегратора 6, а выход последнего подключен ко входу системы управления регулятора 2. Подключенный к роторной цепи двигателя 1 датчик 7 тока последовательно через усилитель-4феобразователь 8 соедипен со вторым входом блока 5 сравнени Усилители-преобразователи 4 к 8 соотве ственно содержат последовательно включ ные фильтр 9 нижних частот, выпрямите 1О, сглаживающий фильтр 11 и фильтр нижних частот, выпрямитель 13, сглажив щий фильтр 14. К зажимам обмотки рот ра подключены дополнительные сопротивления 15, В устройстве для создания сигналов и и Uij используются усилители-преобра зователи 8 и 4, которые преобразуют несинусоидальные ток ротора и напряжен статора в напряжения постоянного тока, пропорциональные амплитудам их первых гармоник lo и UcT)T.e. u., Г-Ч стгде Kg, Кл -постоянные величины} - ток ротора, приведенный к цепи статора. При работе асинхронного двигателя на рабочей части механической характеристики ток I представляется в виде: . в даном случае сигнал Uj на выходе блока 5 сравнения равен: и,,и,,--и СК55-КД (3) где К, Kj, Кр К. - постоянные величи ны; 5 - скольжения. Устройство работает следующим образом. Допустим, что асинхронный двигатель 1 работает в установившемся режиме при некотором скольжении S (скорости (SJj При этом на выходе регулятора 2 напряжения имеется некоторое напряисоние, приложенное к статору двигателя, которому соответствует определенное постоян ное значение напряжения управления, поступающее на регулятор с выхода интегратора 6. Так как напряжение на выходе интегратора постоянно, то, согласно (З), на его входе напряжение равно нулю: Допустим далее, что увеличилась нагрузка на валу дпиг-ателя. Тогда увеличится ток его ротора, соответственно возрас тет первая гармоника тока, увеличится скольжение, согласно (1), напряжение , равное будет возрастать, что в соответствии с (З) вызовет увеличение, напряжения U на выходе интегратора. При этом возрастет и выходное напряжение интегратора (т,е. напряжение управления регулятора), что вызовет увеличение напряжения выхода регулятора, Увел1иение первой гармоники напряжения UCT статора приведет к возрастанию сигнала U (см. (1), поступающего на второй вход интегратора 6. Результирующее напряжение U входе последнего станет уменьшаться, будет уменьшаться при этом и темп роста выходного напряжения интегратора 6,. Ког- да напряжения на обоих входах интегратора сравняются, его выходное напряжение будет вновь постоянным (но большим, чем прежде), и наступит новый установившийся режим. При этом напряжение и первой гармоники статора двигателя -также будет превышать соответствующее прежнее значение. Новое установившееся значение скольжения (скорости) двигателя определяется из (З) при условии и,,-О, когда откуда c-Jk, S- -гг-1 Т. е. согласно (4) и (5) новое установившееся значение скольжения (скорости) двигателя остается равным его прежнему установившемуся значению. Величину уставки скорости можно изменять, например, с помощью входных сопротивлений интегратора 6, Пуск двигателя производится при включении регулятора напряжения от управляющего сигнала, поступающего на его вход, например, смещая характеристику интегратора. Устройство позволяет реализовать астатическую систему стабилизации скорости врашения асинхроннохх) двш-атоля с высокой точностью в широком диапазоне изменения момента нагрузки. Формула изобретения Устройство для стабилизации скорости вращения асинхронного двягатолн с управляемым преобразоватс-лем, содер кашео регулятор напряжения в )ра, последовательно соединслиыо блок удравления рсГулятором, инт.с17 атср и блок сравнения, кхоц которого свял,111 , I.I.IXO;IOM .кп
токи ,in ii .ч;-|1 ри/:-:ои)1я с:т;.1горп чоросв Bi.ntpsiMiiTOJib :i сгл,ч)чива1О1дий фильтр, о т л и 1 а К) и; о о с и тем, что, с целью повышения точности стаОнлпааиин скорости вращения, в цепи датчиков тока ротора и напряжения статора введены фильтры нижних частот, нодклкэтенные ко входам выпрямителей.
Источники ин1}юрмпиии, принятые во внимание при экспортиэо
1.Сборник Автоматиоиро занный электропривод в народном хозяйстве .
М., Энергия , 1971, т.1, с. 86-88, рис. 16.
2.Патент Югославии № 32025, кл. 21-4-2, 1975.

| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Устройство для управления асинхронным электроприводом | 1990 |
|
SU1830609A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Датчик скольжения асинхронного двигателя | 1976 |
|
SU605171A1 |
| Частотно-регулируемый электропривод | 1982 |
|
SU1037406A1 |
| Электропривод | 1987 |
|
SU1432713A1 |
| Электропривод с асинхронной машиной | 1971 |
|
SU548220A3 |
