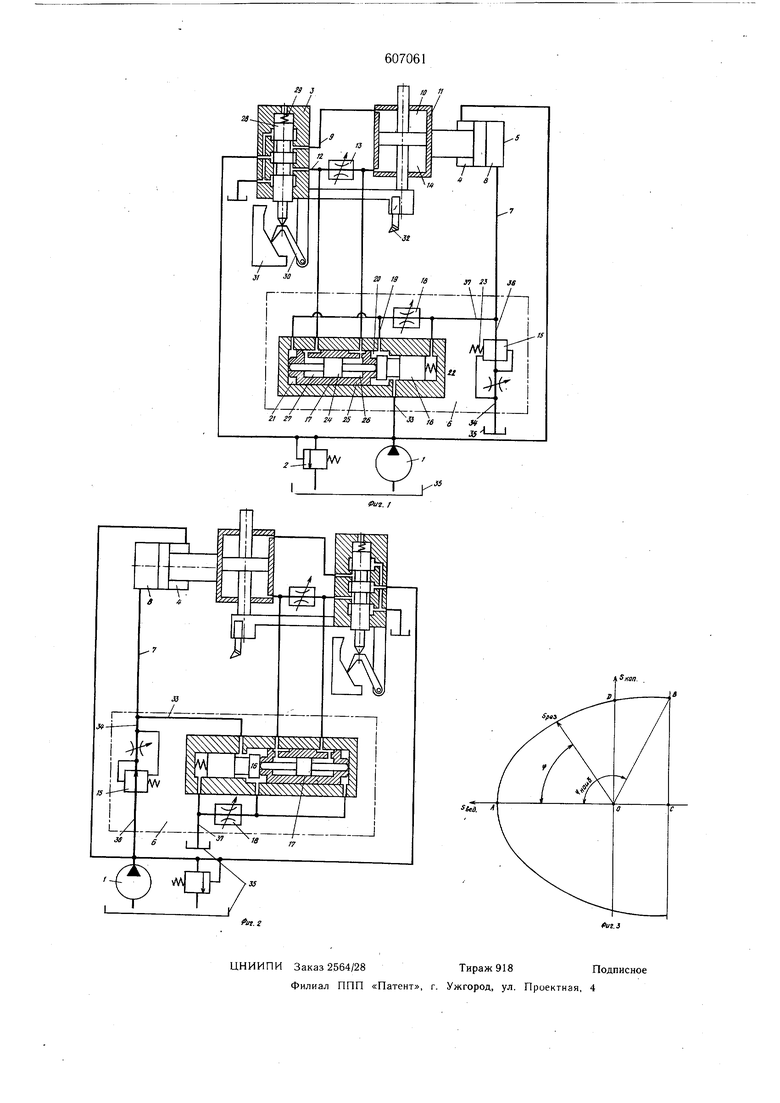
(54) ГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД через дроссель 13 копирующей подачи с полостью 14 цилиндра 11. Дифференциальная система дозирования 6 состоит из последовательно соединенных между собой регулятора 15 скорости и регулятора связи, включающего в себя регулятор 16 еедущей подачи с дифференциальным датчиком 17 перепада давления и дроссель 18 настройки продольной подачи, вход 19 которого соединен с выходом регулятора 16 и его полостями 20 и 21. Выход дросселя соединен с полостью 22 регулятора, который поджат к датчику 17 пружиной 23. Дифференциальный датчик 17 перепада давлеция состоит из плунжера 24, подвижно установленного в гильзе 25, имеющей полости 26 и 27, соединенные с входом и выходом дросселя 13. Гильза 25 подвижно установлена в расточке корпуса регулятора 16. Следящий золотник 3 включает плунжер 28, поджатый пружиной 29 к щупу 30, свободный конец которого опирается на контур копира 31. Корпус следящего золотника жестко связан со щтоком цилиндра 11 и с резцом 32. Цилиндр 11 жестко связан со щтоком цилиндра 5. В схеме (фиг. 1) дифференциальная система дозирования соединяется так, что входом регулятора связи является гидролиния 33 связи, а выход 34 регулятора скорости соединен с баком 35. В схеме (фиг. 2) дифференциальная система дозирования соединяется так, что вход регулятора скорости 15 соединен с напорной гидролинией 36, а выход регулятора связи - со сливной гидролинией 37 и баком 35. Привод работает следующим образом. Питание цилиндров ведущей и копирующей подачи осуществляется насосом 1. Предохранительный клапан 2 поддерживает в нагнетательной магистрали постоянное давление, сбрасывая избыток рабочей жидкости в бак 35. От насоса 1 жидкость под давлением поступает на вход следящего золотника 3, в штоковую полость 4 цилиндра ведущей подачи и на вход дифференциальной системы дозирования 6. Привод, вход регулятора связи которого соединен с напорной, а выход регулятора скорости - со сливной гидролинией, работает следующим образом. Поток жидкости из гидролиНИИ 33 проходит через рабочую щель регулятора ведущей подачи и дроссель 18 с расходом, величина которого определяется взаимодействием датчика 17, дросселя 18 и регулятора 16 с пружиной 23, и делится на два потока. Один с постоянным расходом сбрасывается через регулятор скорости 15 в бак 35. Другой потрк поступает в бесщтоковую полость 8 цилиндра ведущей подачи, обеспечивая тем самым перемещение его со скоростью, определяемой расходом этого потока и размерами цилиндра 5. Жидкость из полости 4 сбрасывается через предохранительный клапан в бак. Такое движение цилиндра обеспечивается тем, что усилие, воздействующее на поршень со стороны бесштоковой полости цилиндра, больще противоположного благодаря разности полезных площадей бесщтоковой и щтоковой полостей цилиндра. В зависимости от отклонения движения щупа 30 от направления, параллельного оси цилиндра ведущей подачи, на упомянутое выще движение накладывается второе копирующее движение - следствие рассогласования в следящем золотнике. При этом цилиндр копирующей подачи получает движение. соответствующее направлению рассогласования и скорость, соответствующую степени этого рассогласования и настройке дросселя копирующей подачи 13. Расход жидкости через дроссель 13 пропорционален скорости перемещения цилиндра копирующей подачи. Перепад давления на этом дросселе, зависящий от расхода через него, воздействует на датчик 17, а через него на регулятор ведущей подачи 16, редуцирует давление масла на входе в дроссель 18, тем самым снижая расход жидкости через него и, если учесть постоянство доли этого расхода, сбрасываемой через регулятор скорости 15 в бак, снижает расход жидкости, поступающей в полость 8 и, соответственно, уменьшает скорость движения цилиндра ведущей подачи. При движении щупа 30 по участку копира, имеющему профиль прямой, перпендикулярной к направлению ведущей подачи, скорость копирующего цилиндра достигает такой величины, когда перепад давления на дросселе 13 посредством датчика 17 и регулятора 16 автоматически снижает расход через дроссель 18 до величины, равной расходу, сбрасываемому через регулятор скорости 15 в бак. В этом случае вся жидкость из регулятора связи сбрасывается через регулятор скорости в баки в ответвлении в бесщтоковую полость 8 расход жидкости отсутствует, что вызывает остановку цилиндра ведущей передачи, соответствующую необходимому положению его при подрезке торца. Если по каким-либо причинам (например в результате воздействия рабочих усилий на гидроцилиндр ведущей подачи) произойдет отклонение траектории движения резца 32 от траектории, соответствующей профилю копира, то возникщее при этом дополнительное рассогласование в следящем золотнике вызывает изменение скорости цилиндра 11 копирующей подачи, перепада давления на дросселе 13, положения регулятора 16 и, в конечном итоге, это вызывает появление некоторой корректирующей скорости гидроцилиндра ведущей подачи, которая восстановит соответствие траектории движения резца 32 и рабочего острия щупа 30. При необходимости привод обеспечивает воспроизведение профиля копира, имеющего участки, у которых угол наклона профиля, измеряемый от направления преобладающей ведущей подачи, может быть больше 90°. В этом случае повыщение рассогласования на следящем золотнике 3 вызывает увеличение скорости цилиндра копирующей подачи, соответственно- увеличение перепада давления на дросселе 13, снижение расхода на дросселе 18 до величины меньшей, чем. расход, сбрасываемый через регулятор скорости 15 в бак. В этом случае под воздействием давления в полости 4 цилиндра 5 жидкость из полости 8 вытесняется и по магистрали 7 сбрасывается через регулятор скорости 15 в. бак. Величина ведущей подачи в направлении, обратном преобладающему, определяется в данном случае разностью между настроенным посредством дросселя регулятора скорости 15 расходом, сбрасываемым в бак, и расходом, поступающим из дросселя 18, определяемым величиной рассогласования в следящем золотнике. Для схемы привода, вход регулятора скорости которого соединен с напорной, а выход регулятора - со сливной гидролинией, принцип работы остается таким же, с той лишь разницей, что преобладающая ведущая подача возникает при увеличении объема полости 4, при этом дозирование ведущей подачи осуществляется за счет регулирования величины расхода, вытесняемого из полости 8 путем регулирования расхода, сбрасываемого через регулятор связи в бак, равного сумме постоянного заранее отрегулированного расхода, поступающего в дифференциальную систему дозирования 6 от насоса через регулятор скорости 15, и расхода, поступающего из бесщтоковой полости 8. При подрезке торца, где угол профиля равен ±90°, расход через регулятор 15 равен расходу через регулятор 16, при этом расход из полости 8 отсутствует, цилиндр 5 не движется. При дальнейщем увеличении рассогласования в следящем золотнике сброс через регулятор связи уменьщается, избыток расхода жидкости, поступающей через регулятор 15, направляется в полость 8. Цилиндр 5 получает перемещение, обратное преобладающему направлению ведуп1ей подачи. Математический анализ кинематики описанного привода показывает, что годограф вектора (фиг. 3) результирующей подачи резца, являющийся геометрической суммой векторов ведущей и копирующей подаЧи, представляет собой эллипс, центр которого смещен от начала координат, являющегося центром вращения вектора результирующей подачи, вдоль оси ведущих подач в направлении, противоположном направлению преобладающей ведущей подачи. При этом параметры описанного следящего привода могут быть подобраны так, чтобы обеспечить наперед заданное соотношение наибольших величин ведущей и копирующих подач, в том числе и соотношение равное или близкое к 1, обычно рекомендуемое для приводов соответствующего назначения. Характер кривизны дуги годографа зависит от величины смещения центра «С эллипса от начала координат «О и может быть отрегулирован посредством регулятора скорости 15 тлк, что дуга эллипса годографа будет ирактически мало отличаться от дуги окружности с центром в нача.ге координат годографа результирующей полями. Величина подачи при подрезке торца определяется отрезком OD и настраивается дросселем копирующей подачи 13. Величина подачи при обработке цилиндрической поверхности соответствует отрезку ОА и настраивается дросселем ведущей подачи 18. Величина результирующей подачи при угле наклона копира, равном ф будет соответствовать величине вектора Sp.j . Наибольший угол копира ср„о.., копирование которого может быть обеспечено, определяется смещением центра эллипса относительно начала коорди.нат, т.е. отрезком «ОС. Этот же отрезок определяет наибольщую величину ведущей подачи в направлении, противоположном преобладающему, совпадающему с направлением оси Stcj . Эта величина настраивается регулятором скорости 15. Таким образом, данный гидравлический следящий привод, обеспечивающий эллиптический закон изменения величины результирующей подачи, позволяет создать гидрокопировальные токарные станки повышенной надежности и устойчивости в широком диапазоне слежения, в котором наибольший угол между направлением результирующей подачи и направлением преобладающей ведущей подачи больше 90°. Формула изобретения Гидравлический следящий привод, содержащий насосную станцию, питающую гидроцилиндры ведущей и копирующей подач, со следящим золотником, один из выходов которого соединен через регулируемый дроссель с одной из рабочих камер гидроцилнндра копирующей подачи, с регулятором скорости, соединенным гидролинией с одной из рабочих камер гидроцилиндра ведущей подачи и регулятором связи, гидроцилиндр которого подключен параллельно регулируемому дросселю, отличающийся тем, что, с целью упрощения конструкции и повышения надежности, гидроцилиндр ведущей подачи выполнен дифференциальным, и его порщневая камера сообщена с гидролинией, последовательно соединяющей регуляторы связи и скорости, вход одного из которых соединен с напорной, а выход другого - со сливной гидролинией насосной станции. Источники информации, принятые во внимание при экспертизе: 1. Авторское свидетельство СССР JNb 416216, кл. В 23 Q 35/36, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| Гидравлическое следящее устройство к копировальным станкам | 1978 |
|
SU779017A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| Ленточно-отрезной станок | 1972 |
|
SU440234A1 |
| Гидравлический следящий привод | 1981 |
|
SU989172A1 |
| Токарно-револьверный станок с устройством для двухкоординатного копирования | 1981 |
|
SU959929A1 |
| Гидравлическая система синхронизации гидроцилиндров | 1980 |
|
SU889905A1 |
| Рулевое управление транспортного средства | 1974 |
|
SU779150A1 |
| Вальцешлифовальный станок для обработки валков в собственных подшипниках | 1975 |
|
SU556029A1 |
| Гидравлический следящий привод | 1982 |
|
SU1019117A1 |