1
Изобретение относится к машиностроению.
По основному авт. св. № 503711 известен промышленный робот, сопержащнй привод поворота, вьлолненный в.внпе зубчато-реечной передачи с размещенными на штоках силовых цилиндров рейками, механическую руку со штоком, снабженным зубпами, и силовой цилиндр осевого перемещения, в корпусе которого жестко закреплена втулка с продольньгми, взаимодействующими с зубцами штока пазами, а внутри этой втулки установлен шарнирно связанный с корпусом цилиндра ходовой винт, несущий трубки для подачи рабочей среды, и взаимодействующие с указанными зубцами раздвижные упоры с подвижно установленными поршнями.
Известный робот ненадежен в работе.
Цель изобретения - повышение надежности робота в работе.
Для этого в предлагаемом роботе раэ движные упоры снабжены щтуцерами, предохра1;ительными сухарями и направляющими штифтами, каждый штуцер соединен гидравлически с магистралью и снабжен поршнем, а предохранительный сухарь смонтирован над
этим поршнем с гарантированным зазором между ним и корпусом раздвижного упора, при этом- направляющие штифты расположены на этом корпусе с возможностью взаимодействия с пазами ходового винта.
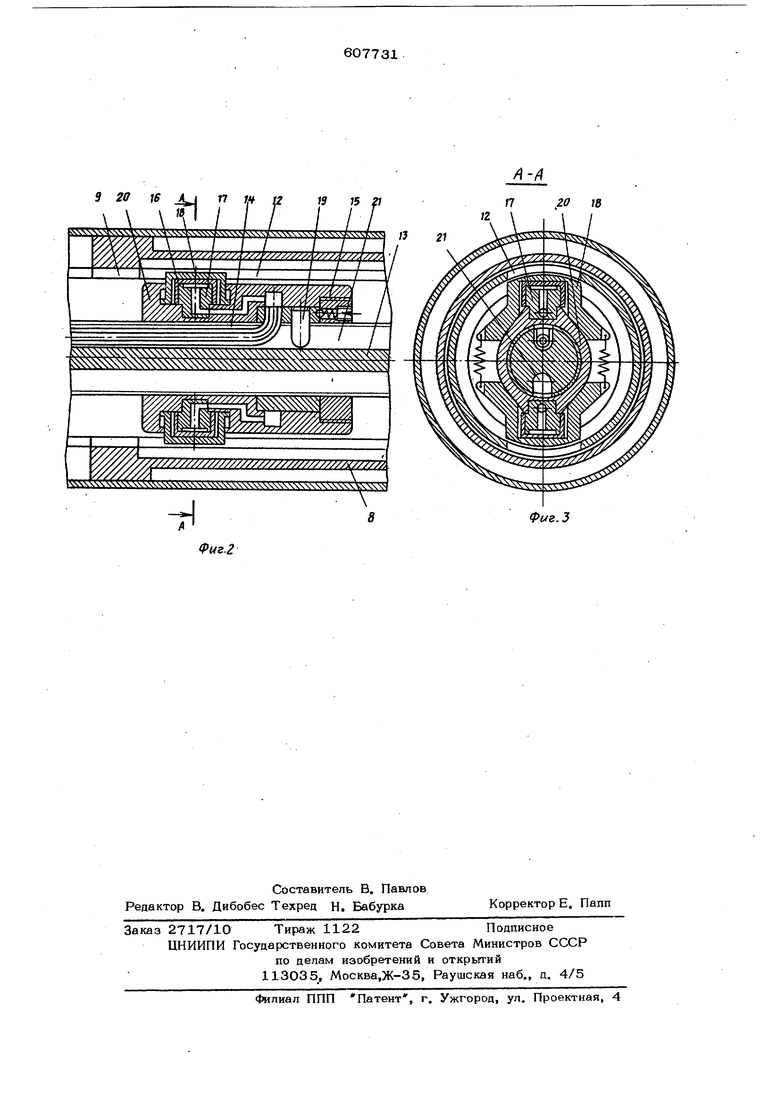
На фиг. 1 схематично изображен описываемый робот, разрез; на фиг. 2 - раздвижной упор, разрез| на фиг.; 3 - разрез А-А на фиг. 2.
На основании 1 робота смонтированы механизмы поворота 2 и осевого перемещения 3 механической руки. Механизм 2 поворота содержит привод 4, вьиолненный в виде зубчато-реечной передачи с размещенными на штоках силовых цилиндров 5 рейками 6
Механическая рука 7 состоит из штока 8, снабженного зубцами 9, и силового цилиндра осевого перемещения, в корпусе Ю которого жестко закреплена втулка 11с продольными, взаимодействующими с зубцами 9 пазами 12, Внутри втулки 11 установлен шарнирно связанный с корпусом 10 цилиндра ходовой винт 13, несущий трубки 14 для подачи рабочей среды и взаимодействуй)щие с зубцами и раздвижные упоры 15 с подвижно установленными поршнями 16.
Раздвижные упоры 15 снабжены штуцерами 17, предохранительными сухарями 18 и направляющими штифтами 19. Каждый штуцер 17 закреплен в раздвижном упоре 15,соединен гидравлически с трубкой 14 для подачи рабочей среды и несет поршень 16. Над поршнем 16 смонтирован предохранительный сухарь 18 с гарантированным зазором между ним и корпусом раздвижно упора 15. Величина гарантированного зазора выбрана не меньше 1,1 величины радиальног зазора между корпусом 20 раздвижного упора 15 и предохранительным сухарем 18. Направляющие штифты 1& закреплены в корпусе 20 с возможностью взаимодействия с пазами 21 ходового винта 13..
Промышленный робот работает следующим образом..
При перемещении штока 8 относительно ходового винта 13, несущего раздвижные упоры 15, взаимодействующие с зубцами 9 штока 8, и при подаче рабочей среды под поршень 16, взаимодействующий с пред охранительным сухарем 18 и штуцером 17, упоры 15 раздвигаются и ограничивают перемещение механической руки 7. Штифт -19 предохраняет трубку 14 от поломки при взаимо действии с пазами 21 ходового винта.
Формула изобретен и я
Промышленный робот по авт. св. hfe 503711 отличающийся тем, что, с целью повышения его надежности в работе, раздвижные упоры снабжены штуцерами, предохранительными сухарями и направляющими штифтами, каждый штуцер соединен гидравлически с магистралью и снабжен поршнем, а предохранительный сухарь смонтирован над этим поршцем с гарантированным зазором между ним и корпусом раздвижного упора, -при этом направляющие штифты расположены на этом корпусе с возможностью взаимодействия с .пазами ходового винта.
Источники информации, принятые во внимание при экспертизе:
1. Авторское свидетельство hfc 503711 кл. В 25 J 9/ОО, 1974. 18 1Ъ 12
20 16
J fr 1ft 12W n 2t
..I...I1LlL
.vsчxч чv x ГOOs ччx s c N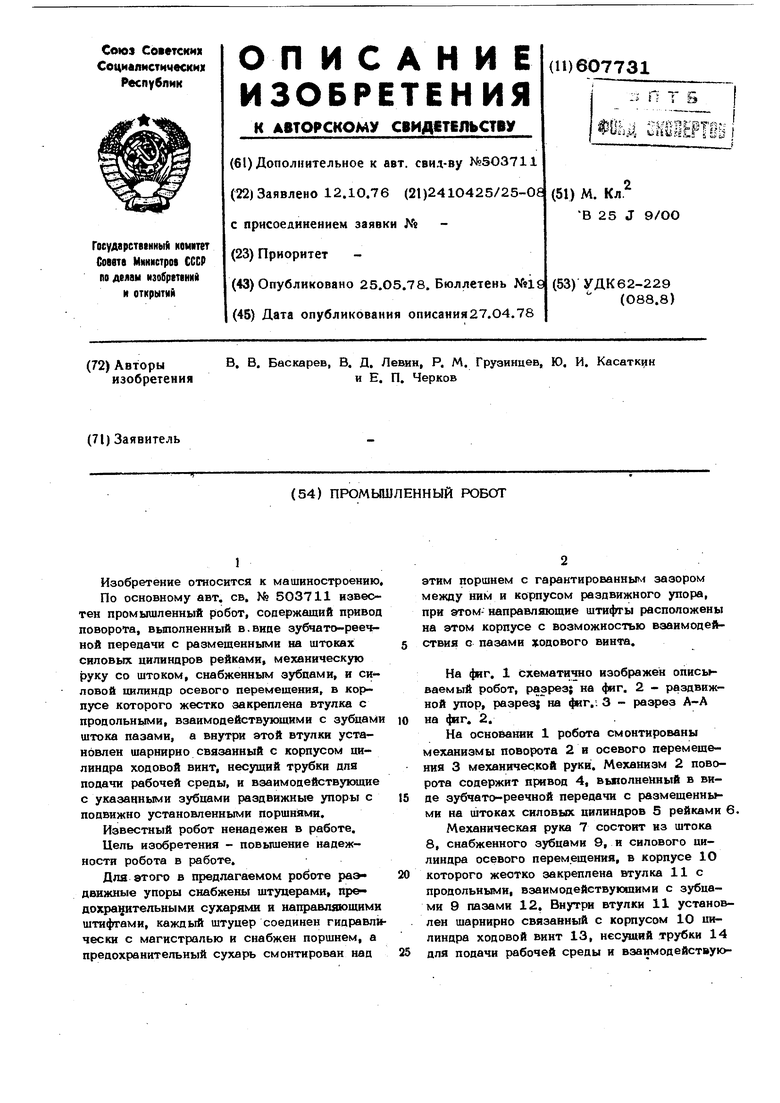
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1974 |
|
SU503711A1 |
| Промышленный робот | 1983 |
|
SU1079427A1 |
| Устройство для позиционирования пневмопривода | 1979 |
|
SU861773A1 |
| Модуль промышленного робота | 1981 |
|
SU1016154A1 |
| Робототехнологический комплекс для сборки | 1990 |
|
SU1782203A3 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2464451C2 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2268401C2 |
| Промышленный робот | 1980 |
|
SU880713A1 |
| Микроманипулятор для установки узлов механизма часов | 1982 |
|
SU1083154A1 |
| Устройство для позиционирования пневмопривода | 1980 |
|
SU928303A1 |