Изобретение относится к машиностроению.
По основному авт. св. № 503711 известен промышленный робот, содержащий механическую руку с силовым цилиндром осевого перемещения и приводом поворота, выполненным в виде зубчато-реечной передачи, рейка которой размещена на щтоке силового цилиндра, в корпусе цилиндра осевого перемещения жестко закреплена втулка с продольными пазами, щток этого цилиндра выполнен полым и снабжен со стороны порщня по меньщей мере двумя диаметрально расположенными зубцами, входящими в пазы втулки, внутри которой установлен шарнирно связанный с корпусом цилиндра ходовой винт, несущий раздвижные упоры, взаимодействующие с указанными зубцами, а привод поворота снабжен регулируемыми упорами, входящими в отверстие на рейке, перекрываемые управляемыми заслонками 1.
Недостатком известного промыщленного робота являются узкие технологические возможности, так как при установке более одного раздвижного упора исключается независимая настройка на позиции отдельных упоров.,
Цель изобретения - расширение технологических возможностей.
Цель достигается тем, что промышленный робот, содержащий механическую руку с силовым цилиндром осевого перемещения и приводом поворота, выполненным в виде зубчато-реечной передачи, рейка которой размещена на щтоке силового цилиндра, в корпусе цилиндра осевого перемещения жестко закреплена втулка с продольными пазами, щток этого цилиндра.выполнен полым и снабжен со стороны порщня по меньщей мере двумя диаметрально расположенными зубцами, входящими в пазы втулки, внутри которой установлен щарнирно связанный с корпусом цилиндра ходовой винт, несущий раздвижные упоры, взаимо.аействующие с указанными зубцами, а привод поворота снабжен регулируемыми упорами входящими в отверстия на рейке, перекрываемыми заслонками, снабжен резьбовыми втулками с фиксаторами, при этом резьбовые втулки кинематически связаны с ходовым винтом и размещены на раздвижных упорах с возможностью вращения вокруг
оси ходового винта относительно этих упоров.
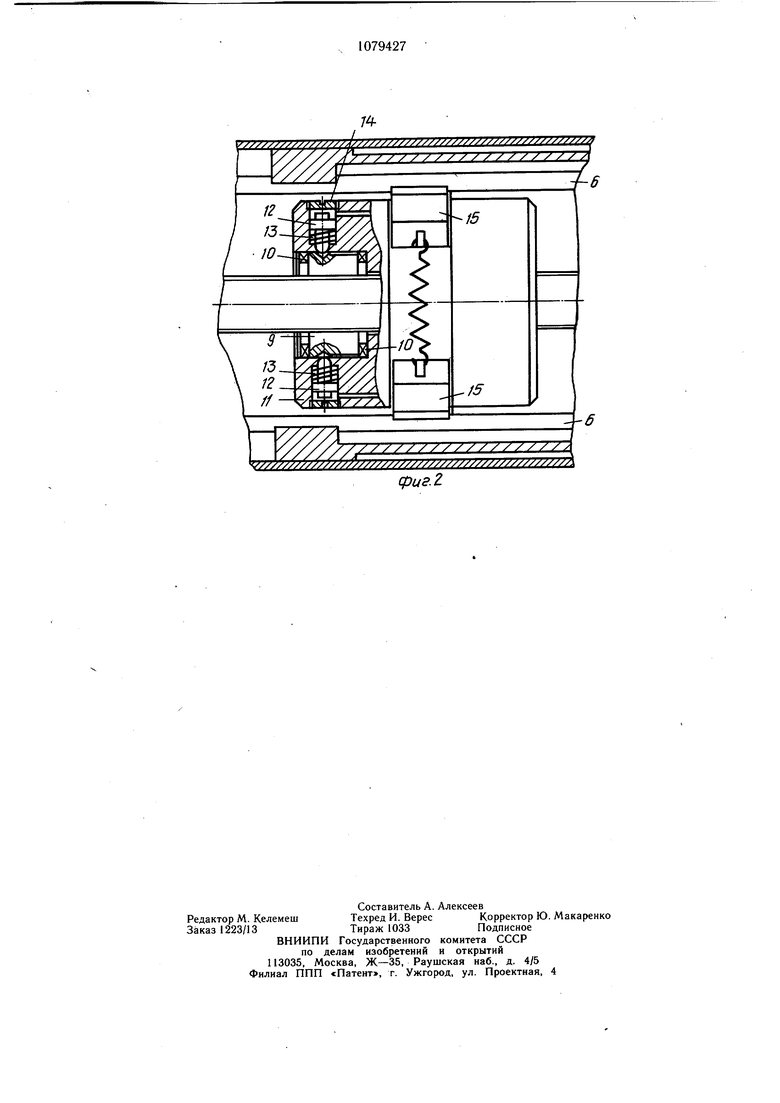
На фиг. 1 изображена механическая рука промыщленного робота; на фиг. 2 - раздвижной упор, разрез.
Промыщленный робот включает механическую руку 1, которая состоит из щтока 2, снабженного зубцами 3, и силового цилиндра осевого перемещения с корпусом 4, в щтоке 2 жестко закреплена втулка 5 с пазами 6, установлены щарнирно связанный с корпусом 4 цилиндра ходовой винт 7 и взаимодействующие с зубцами 3 раздвижные упоры 8.
Раздвижные упоры 8 снабжены резьбовой втулкой 9, установленной на подшипниках качения 10 в корпусе II, и специальными пружинными фиксаторами 12, которые удерживаются пружинами 13 в прижатом к крыщкам 14 положении. Каждый фиксатор 12 соединен гидравлически с магистралью для подачи рабочей среды в раздвижной упор 8.
Настройка упоров 8 на позицию осуществляется следующим образом.
При подаче рабочей среды в настраиваемый на позицию упор 8 сухари 15, находящиеся в постоянном зацеплении с пазами 6 втулки 5, раздвигаются для ограничения перемещения механической руки 1, а фиксаторы 12, преодолевая усилия пружин 13, входят в зацепление с резьбовой втулкой 9. Одновременно включается приводной механизм, который вращает ходовой винт 7, перемещающий упор 8 вдоль оси полого щтока 2 до выбранной позиции. После этого приводной механизм и подача рабочей среды отключается. Сухари 15 возвращаются в исходную позицию. Таким же образом производится настройка на позицию других упоров 8, при этом ранее настроенный упор остается на своей позиции, так как резьбовая втулка 9 проворачивается вместе с ходовым винтом 7 в подшипниках 10 относительно корпуса 11 упора 8, зафиксированного от поворота с помощью сухарей 15 в пазах 6 втулки 5.
Использование предлагаемого изобретения позволяет расширить технологические возможности за счет увеличения количества выполняемых операций, кроме того, переналадку точек позиционирования можно, производить не останавливая технологического процесса.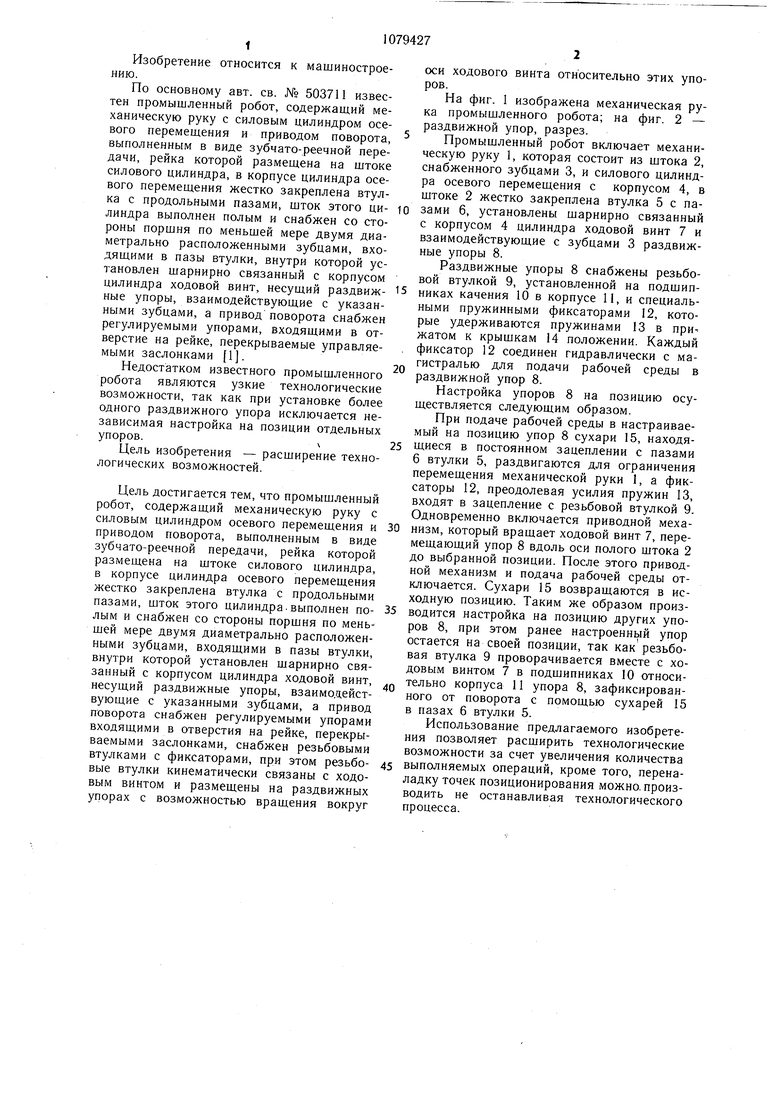
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1976 |
|
SU607731A2 |
| Промышленный робот | 1974 |
|
SU503711A1 |
| Устройство для позиционирования пневмопривода | 1979 |
|
SU861773A1 |
| Модуль промышленного робота | 1981 |
|
SU1016154A1 |
| Модуль промышленного робота | 1980 |
|
SU891426A1 |
| Захватное устройство | 1991 |
|
SU1815213A1 |
| Автоматический сборочный комплекс | 1987 |
|
SU1521545A1 |
| Устройство для сборки корпусных деталей с комплектующими | 1988 |
|
SU1511042A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Промышленный робот | 1981 |
|
SU1042992A1 |
ПРОМЫШЛЕННЫЙ РОБОТ по авт. св. № 503711, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен резьбовыми втулками с фиксаторами, при этом резьбовые втулки кинематически связаны с ходовым винтом и размещены на раздвижных упорах с возможностью вращения вокруг оси ходового винта относительно раздвижных упоров.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Промышленный робот | 1974 |
|
SU503711A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
