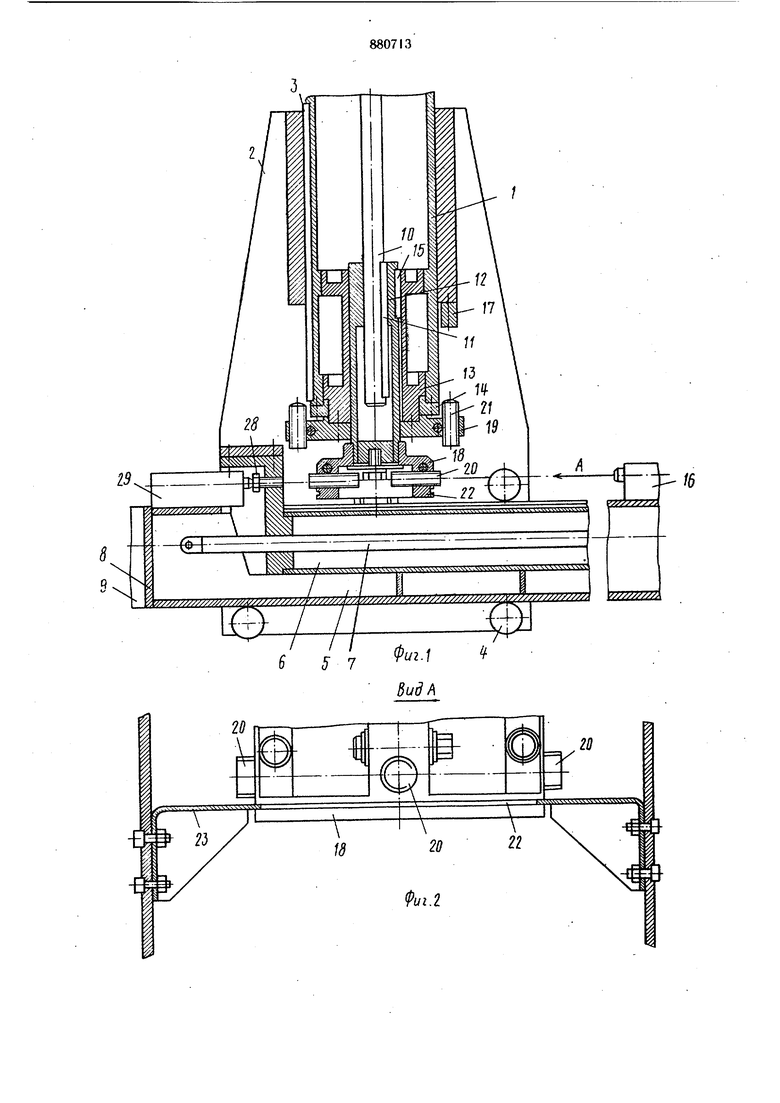
Изобретение относится к машиностроению, а именно к конструкциям промышленных роботов. Известен промышленный робот, содержащий поворотную колонну, на которой установлена с возможностью вертикального перемещения каретка, закрепленную на каретке механическую руку с приводом продольного перемещения в виде силового цилиндра, размещенные иа каретке и руке ограничители хода и упоры 1J. Недостатком данного робота является сложность конструкции и низкая надежность в работе. Цель изобретения - упрощение конструкции и повыщение иадежности робота. Эта цель достигается тем, что промышленный робот снабжен смонтированными соосно с кареткой между поворотной колонной и силовым цилиндром дисками с упорами, причем один из дисков установлен с возможностью вертикального перемещения синхронно с кареткой. . На фиг. I изображен промышленный робот, продольный разрез; на фиг. 2 - вид А на фиг. I; на фиг. 3 - схема рабочего участка, обслуживаемого промышленным роботом. Промышленный робот содержит поворотную колонну .1, на которой установлена с возможностью перемещения каретка 2. Колонна I и каретка 2 связаны между собой посредством скользящей шпонки 3, обеспечивающей каретке 2 поворот. На каретке 2 в направляющих 4 качения установлена механическая рука 5, с приводом продольного перемещения в виде силового цилиндра, например пневмоцилиндра 6, шток 7 которого является подвижным элементом руки 5. К фланцу 8 руки 5 прикреплена кисть 9 с механизмом захвата (не показан). Поворотная колонна 1 связана с приводом поворота (не показан). Соосио поворотной колонне I н внутри ее размещен зафиксированный от вращения вал 10, на конце которого на скользящей шпонке Ii установлена втулка 12. Направляющая 13 втулки 12 жестко закреплена с помощью крышки 14 на торце поворотной колонны 1 и посредством скользящей шпонки 15 зафиксирована от поворота.
На корпусе руки 5 расположен ограничитель хода 16, а на каретке 2 ограничитель хода 17.
Между поворотной колонной 1 и силовым цилиндром 6, соосно с кареткой 2 смонтированы диски 18 и 19, с расположенными в них соответственно упорами 20 и 21, взаимодействующими с ограничителями хода 16 и 17. Диск 18 жестко соединен с торцом втулки 12, установленной с возможностью осевого перемещения. На периферии диска 12 расположена кольцевая канавка 22, с которой контактируют жестко закрепленные на каретке 2 зацепы 23, позволяющие диску 18 перемещаться в вертикальной плоскости синхронно с кареткой 2. Диск 19 жестко закреплен на неподвижной направляюцхей 13
Упоры 20 и 21 служат для остановки руки 5 и каретки соответственно.
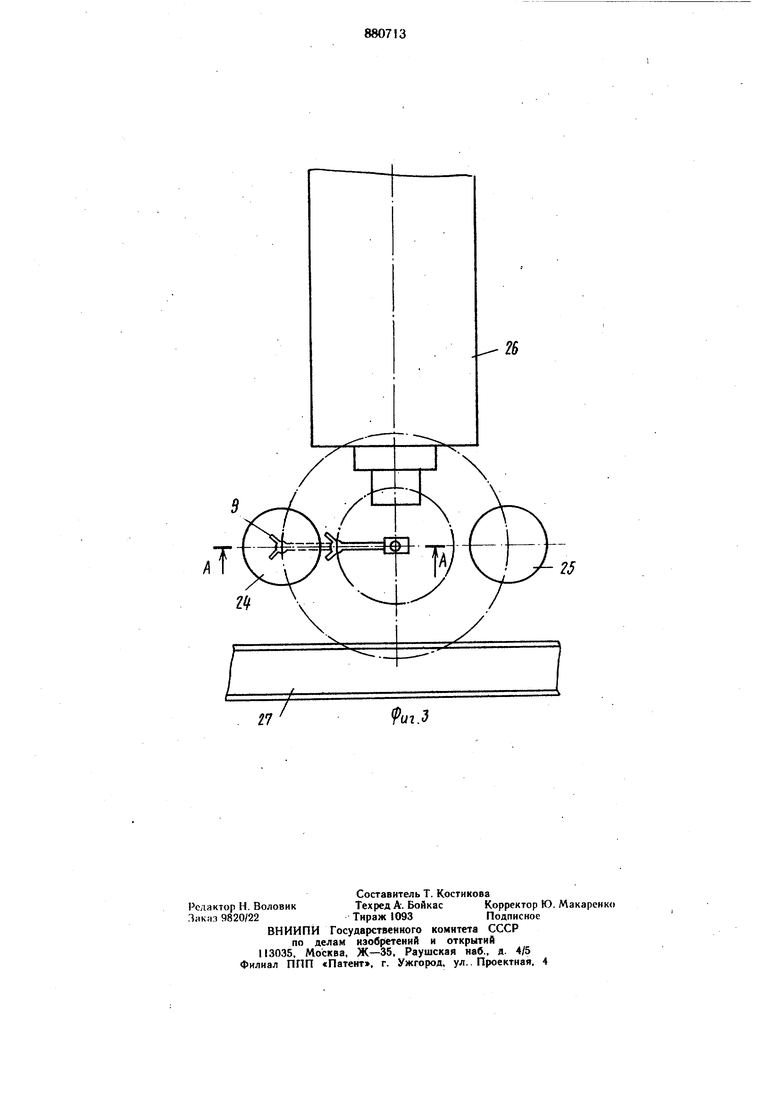
Количество упоров 20 и 21 соответствует количеству обслуживаемых единиц оборудования, например 24 и 25 - закалочных прессов, 26 - рольганговой печи и 27 - транспортера-накопителя, а в работе занят один из упоров 20 и один из упоров 21, в зависимости от обслуживаемой единицы оборудования 24 - 27..
Для остановки руки 5 при обратном ходе служит о1-раничительный упор 28, установленный на каретке 2, и взаимодействующий с ним упор 29, установленный на корпусе руки 5.
Ограничитель хода 16 и упор 29 снабжены демпфирующими устройствами .(не показаны) для смягчения ударов.
Диски 18 и 19 выполнены сменными для удобства быстрой переналадки для обслуживания различного количества оборудования.
Поднастройка упоров 20 на длину хода руки 5 осуществляется за счет резьбы на их поверхностях. Для обслуживания оборудования, отличавэщегося по высоте, упоры 21 также выполнены регулируемыми.
Устройство работает следующим образом.
При включении привода поворота колонны 1 вместе с ней поворачивается каретка 2 и рука 5. Вал 10, втулка 11, направляющая 13 и диски 18 и 19 остаются неподвижными. Зацепы 23 жестко соединенные с кареткой 2, скользят по кольцевой канавке 17 диска 18.
В момент установки руки 5 напротив одной из единиц оборудования 24-27 (согласно программе), привод поворота отключается. При этом, ограничитель хода 16 устанавливается напротив одного из упоров 20, соответствующего заданной единице оборудования, а ограничитель хода 17, соответственно, напротив одного из упоров 21. При поступлении команды от пульта управления, например для захвата детали, каретка 2 опускается до контакта ограничителя хода 17 с упором 21. Синхронно с кареткой 2 опускается и диск 18 под взаимодействием зацепов 23. Одновременно с движением каретки 2 (до начала движения или после окончания его - в зависимости от заданной программы) происходит выдвижение руки 5 до тех пор, пока ограничитель .хода -16 не войдет в контакт с соответствующим упором 20.
После отработки фомышленным роботом заданных программой движений механизмы возвращаются в исходное положение.
Размещение диска с упорами между поворотной колонной и силовым цилиндром, соосно с кареткой, радиальное расположение вышеуказанных упоров в дисках, а также установка одного из дисков с возможностью вертикального синхронного перемещения с кареткой, позволяет установить в необходимое положение упоры одновременно на все обслуживаемое оборудование без применения для их настройки пневмо- или какого-либо иного привода, а следовательно, и устрой ств его управления, что упрощает конструкцию и повышает надежность.
Формула изобретения
Промышленный робот, содержащий поворотную колонну, на которой установлена с возможностью вертикального перемещения каретка, закрепленную на каретке механическую руку с приводом продольного перемещения в виде силового цилиндра, размещенные на каретке и руке ограничители хода и упоры, отличающийся тем, что, с целью упрощения конструкции и повышения надежности, он снабжен смонтированными соосно каретке между поворотной колонной и силовым цилиндром дисками с упорами, причем один из дисков установлен с возможностью вертикального перемещения синхронно с кареткой.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 503711, кл. В 25 J 9/00, 1974.
/б
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отбортовки цилиндрических изделий | 1985 |
|
SU1329866A1 |
| Рука промышленного робота | 1980 |
|
SU935262A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Промышленный робот | 1986 |
|
SU1371896A1 |
| АВТОМАТИЗИРОВАННАЯ ЛИНИЯ ГОРЯЧЕЙ ШТАМПОВКИ КРУПНЫХ ПОКОВОК С ВЫТЯНУТОЙ ОСЬЮ | 2003 |
|
RU2262436C2 |
| Механизм позиционирования робота | 1983 |
|
SU1123774A1 |
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| Загрузочно-разгрузочное устройство к горизонтальному поворотному столу | 1984 |
|
SU1180226A1 |
| Робот к штамповочному прессу | 1982 |
|
SU1127674A1 |
| Промышленный робот Жаркова | 1987 |
|
SU1444139A1 |