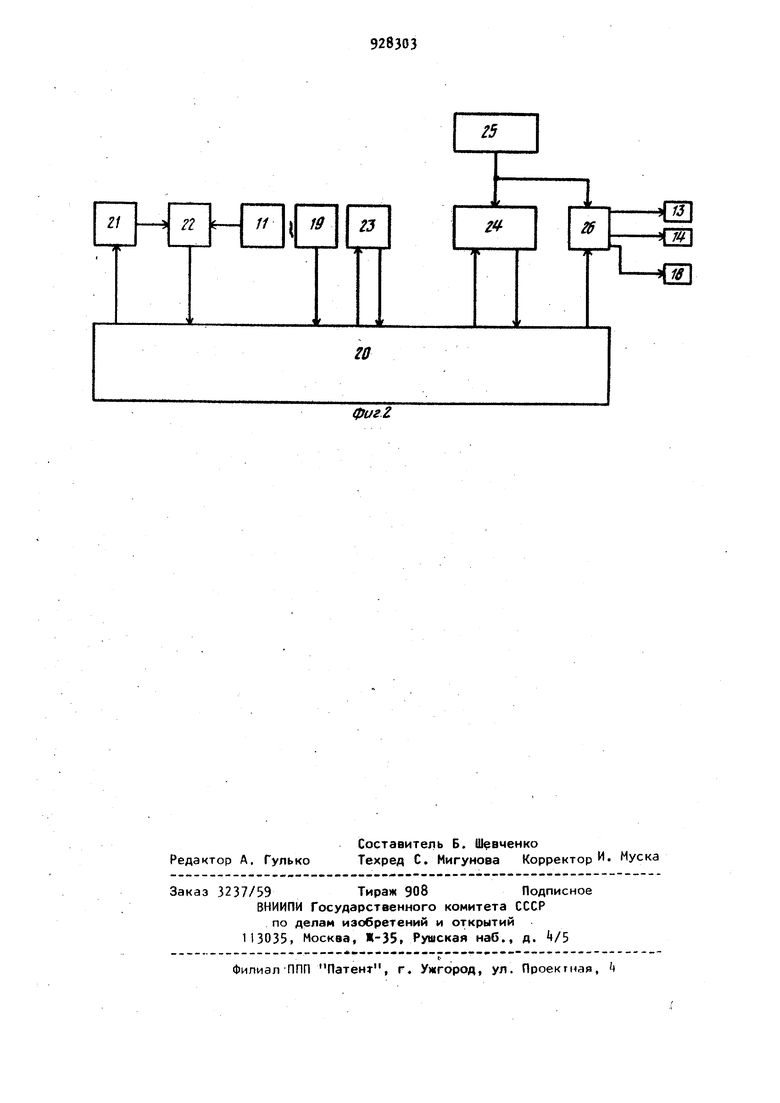
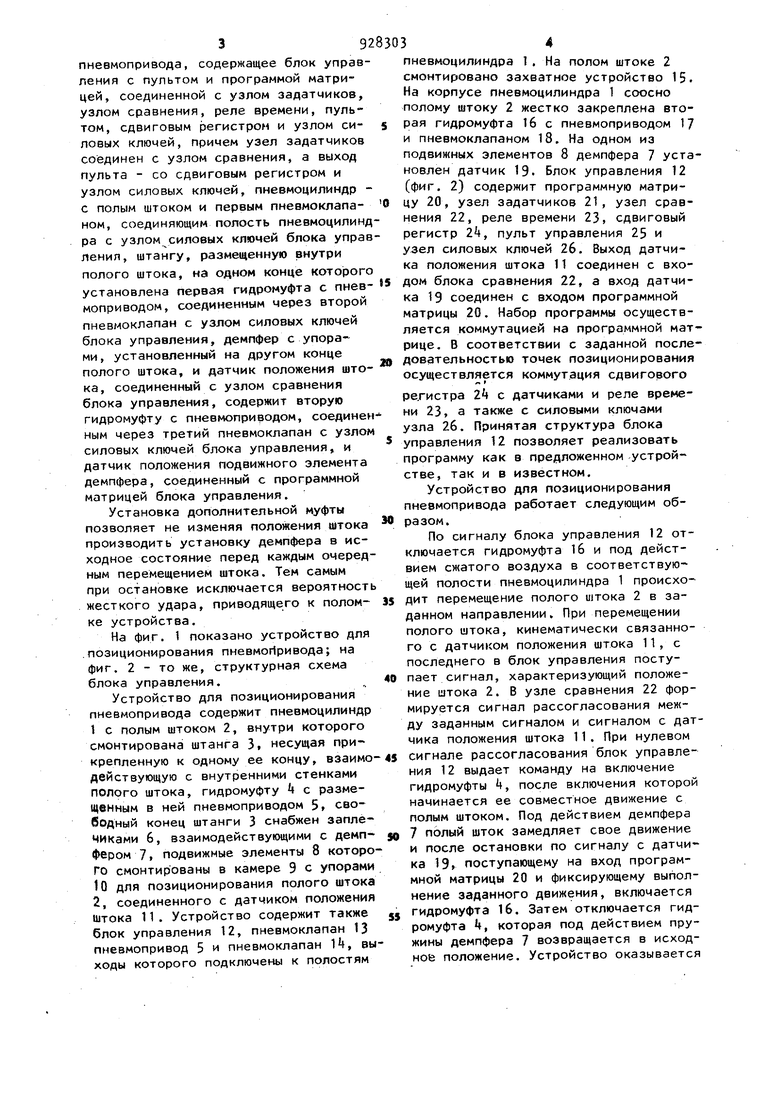
Изобретение относится к автоматическому управлению и может быть использовано в промышленных работах. Известно устройство позиционирова ния пневмопривода, которое содержит силовой пневмоцилиндр со штоком, снабженным зубцами. В корпусе этого цилиндра жестко закреплена втулка с продольными и взаимодействующими зубцами штока пазами. Внутри втулки установлен ходовой винт, который шар нирно связан с корпусом цилиндра 113 Недостатком этого устройства является сложность его конструкции. Наиболее близким к изобретению является устройство для позиционирования пневмопривода, содержащее блок управления с пультом и программной матрицей, соединенной с узлом задатчиков, узлом сравнения, реле времени сдвиговым регистром и узлом силовых ключей, причем узел задатчиков соеди нен с узлом сравнения, а выход пульта - со сдвиговым регистром и узлом силовых ключей, пневмоцилиндр с полым штоком и первым пиевмоклапапом, соединяющим полость пневмоцилиндра с- узлом силовых ключей блока управления, штангу, размещенную внутри полого штока, на одном конце которого установлена первая гидромуфта с пневмоприводом, соединенным через второй пневмоклапан с узлом силовых ключей блока управления, демпфер с упорами, установленный на другом конце полого штока, и датчик положения штока, соединенный с узлом сравнения блока управления t2. Недостатком такого устройства является то, что при последовательных нескольких перемещениях- штока ,в одном и том же направлении возможен жесткий удар, приводящий к перегрузке устройства и его низкой надежности в работе. Цель изобретения - улучшение динамических характеристик устройства и повышение его надежности. Указанная цель достигается тем, что устройство для позиционирования пневмопривода, содержащее блок управ ления с пультом и программой матрицей, соединенной с узлом задатчиков, узлом сравнения, реле времени, пультом, сдвиговым эегистрои и узлом силовых ключей, причем узел задатчиков соединен с узлом сравнения, а выход пульта - со сдвиговым регистром и узлом силовых ключей, пневмоцилиндр с полым штоком и первым пневмоклапаном, соединяющим полость пневмоцилинд ра с узлом силовых ключей блока управ ления, штангу, размещенную внутри полого штока, на одном конце которого установлена первая гидромуфта с пнев моприводом, соединенным через второй пневмоклапан с узлом силовых ключей блока управления, демпфер с упорами, установленный на другом конце полого штока, и датчик положения штока, соединенный с узлом сравнения блока управления, содержит вторую гидромуфту с пневмоприводом, соединен ным через третий пневмоклапан с узлом силовых ключей блока управления, и датчик положения подвижного элемента демпфера, соединенный с программной матрицей блока управления. Установка дополнительной муфты позволяет не изменяя положения штока производить установку демпфера в исходное состояние перед каждым очередным перемещением штока. Тем самым при остановке исключается вероятность жесткого удара, приводящего к поломке устройства. На фиг. 1 показано устройство для позиционирования пневмоИривода; на фиг. 2 - то же, структурная схема блока управления. Устройство для позиционирования пневмопривода содержит пневмоцилиндр 1 с полым штоком 2, внутри которого смонтирована штанга 3, несущая прикрепленную к одному ее концу, взаимодействующую с внутренними стенками полого штока, гидромуфту k с размещенным в ней пневмоприводом 5, свободный конец штанги 3 снабжен заплеЧИками 6, взаимодействующими с демпфером 7, подвижные элементы 8 которо го смонтированы в камере 9 с упорами Ю для позиционирования полого штока 2, соединенного с датчиком положения Штока 11. Устройство содержит также блок управления 12, пневмоклапан 13 пневмопривод 5 и пневмоклапан , вы ходы которого подключены к полостям пневмоцилиндра 1. На полом штоке 2 смонтировано захватное устройство 15. На корпусе пневмоцилиндра 1 соосно полому штоку 2 жестко закреплена вторая гидромуфта 16 с пневмоприводом 17 и пневмоклапаном 18. На одном из подвижных элементов 8 демпфера 7 установлен датчик 19. Блок управления 12 (фиг. 2) содержит программную матрицу 20, узел задатчиков 21, узел сравнения 22, реле времени 23, сдвиговый регистр , пульт управления 25 и узел силовых ключей 26. Выход датчика положения штока 11 соединен с вхоДом блока сравнения 22, а вход датчика 19 соединен с входом программной матрицы 20. Набор программы осуществляется коммутацией на программной матрице. В соответствии с заданной последовэтельностью точек позиционирования осуществляется коммутация сдвигового регистра 2 с датчиками и реле времени 23, а также с силовыми ключами узла 26. Принятая структура блока управлений 12 позволяет реализовать программу как в предложенном устройстве, так и в известном. Устройство для позиционирования пневмопривода работает следующим образом. По сигналу блока управления 12 отключается гидромуфта 16 и под действием сжатого воздуха в соответствующей полости пневмоцилиндра 1 происходит перемещение полого штока 2 в заданном направлении. При перемещении полого штока, кинематически связанного с датчиком положения штока 11, с последнего в блок управления поступает сигнал, характеризующий положение штока 2. В узле сравнения 22 формируется сигнал рассогласования между заданным сигналом и сигналом с датчика положения штока 11. При нулевом сигнале рассогласования блок управления 12 выдает команду на включение гидромуфты , после включения которой начинается ее совместное движение с полым штоком. Под действием демпфера 7 полый шток замедляет свое движение и после остановки по сигналу с датчика 19, поступающему на вход программной матрицы 20 и фиксирующему выполнение заданного движения, включается гидромуфта 16. Затем отключается гидромуфта , которая под действием пружины демпфера 7 возвращается в исходной положение. Устройство оказывается 59 подготовленным для выполнения следующего кадра программы. Такое техническое решение при реал зации позволяет значительно улучшить динамические характеристики устройства за смет подготовки демпфера в предыдущем кадре программы, что в свою очередь может расширить технологические возможности устройства и повышает его надежность. Формула изобретения Устройство для позиционирования пневмопривода, содержащее блок управлеиия с пультом и программной матрицей, соединенной с узлом задатчиков, узлом сравнения, реле времени, пультом, сдвиговым регистром и узлом силовых ключей, причем узел задатчиков соединен с узлом сравнения, а выход пульта - со сдвиговым регистром и узлом силовых ключей, пневмоцилиндр с полым штоком и первым пневмоклапаном, соединяющим полость пневмоцилинд ра с узлом силовых ключей блока управ 3 ления, штангу, размещенную внутри полого штока, на одном конце которого установлена первая гидромуфта с пнев моприйодом, соединенным через второй пневмоклапан с узлом силовых ключей блока управления, демпфер с упорами, установленный на другом конце полого штока, и датчик положения штока, соединенный с узлом сравнения блока управления, отличающееся тем, что, с целью повышения надежности, оно содержит вторую гидромуфту с Пневмоприводом, соединенным через третий пневмоклапан с узлом силовых ключей блока управления, и датчик положения подвижногоэлемента демпфера, соединенный с программной матрице блока управления. Источники информации, принятые во внимание при экспертизе . Авторское свидетельство СССР (f 503711, кл. 8 25 J 9/00, 197. 2. Авторское свидетельство СССР по заявке № 253103б/2,кл.G 01 В 1/18, 1978 (прототип).
19
//
1
ZffZ6
T8
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционер | 1986 |
|
SU1388831A1 |
| Устройство для позиционирования пневмопривода | 1979 |
|
SU861773A1 |
| Устройство управления промышленным роботом | 1981 |
|
SU970323A1 |
| Устройство для позиционирования пневмопривода | 1977 |
|
SU734609A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ | 2021 |
|
RU2767676C1 |
| Пневматический привод, система и способ управления пневматическим приводом | 2019 |
|
RU2718382C1 |
| Позиционный пневмопривод | 1989 |
|
SU1642100A1 |
| Самосвальный автопоезд с боковой разгрузкой | 1983 |
|
SU1183410A1 |
| Устройство для управления манипулятором | 1985 |
|
SU1296398A1 |
| Устройство для отделения заготовок от стопы | 1986 |
|
SU1360862A1 |