(54) ШАГОВЫЙ КОНВЕЙЕР ДЛЯ ТРАНСПОГТИ1ЮВАНИЯ ШТУЧНЫХ ГРУЗОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Штанговый конвейер для перемещения штучных грузов | 1979 |
|
SU874519A1 |
| Шаговый конвейер | 1976 |
|
SU603620A1 |
| ШТАНГОВЫЙ КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1973 |
|
SU361943A1 |
| УСТРОЙСТВО для ПЕРЕДАЧИ ШТУЧНЫХ ГРУЗОВ | 1973 |
|
SU373235A1 |
| Устройство для загрузки контейнеров изделиями | 1989 |
|
SU1705190A1 |
| Накопитель штучных грузов для поточных линий | 1977 |
|
SU719933A1 |
| Штанговый конвейер | 1978 |
|
SU776959A1 |
| Шаговый конвейер | 1981 |
|
SU1043078A1 |
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ ШТУЧНЫХ ГРУЗОВ " | 1969 |
|
SU250022A1 |
| Подвесной конвейер для транспортировки длинномерных грузов | 1981 |
|
SU988682A1 |
Изобретение относится к промышленнЪму транспорту, в частности к штанговым конвейерам для транспортирования штучных грузов, например ааформованных опок.
Известны шаговые конвейеры для транспортирования штучных грузов, содержащие штанги с толкающими кулаками, .совершающие возвратно-поступательное движение от привода и перемещающие грузы по горизонтальным направляющим l.
Однако на этом конвейере нельзя транспортирс ать грузы с выступающей нижней частью за плоскость транспортирования, так как посереднне конвейера под грузом размещена шГанга с грузоведушнми кулаками.
Наиболее близким техническим решением к предлагаемому изобретению явл11ется устройство, включающее щтанги, установленные на опорах с возможностью возвратно-поступательного движения, тяговый орган, связанный со штангой, и привод 2.
Недостатком этого устройства являются большие габариты, которые снижают технологические возможности конвейера.
Цель изобретения - обеспечение компактности конвейера.
Это достигается тем, что опоры выполнены из двух роликов, при этом тяговый .орган непосредственно прикреплен к низу штанги и размещен между роликами.
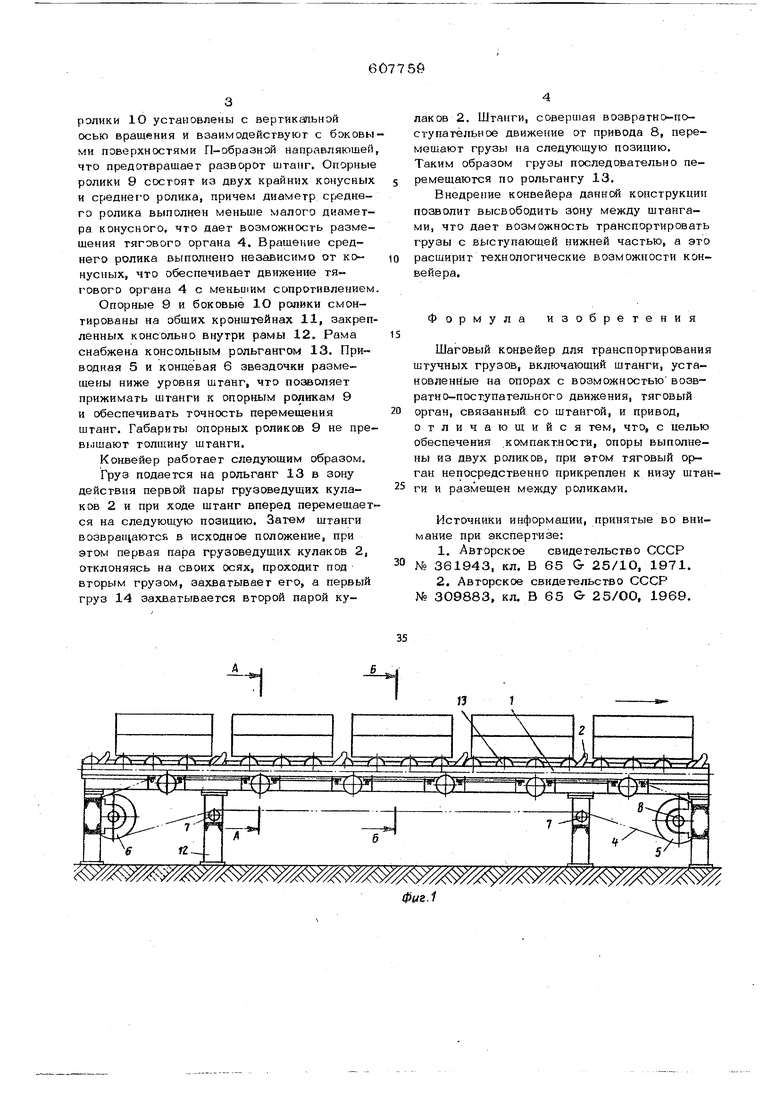
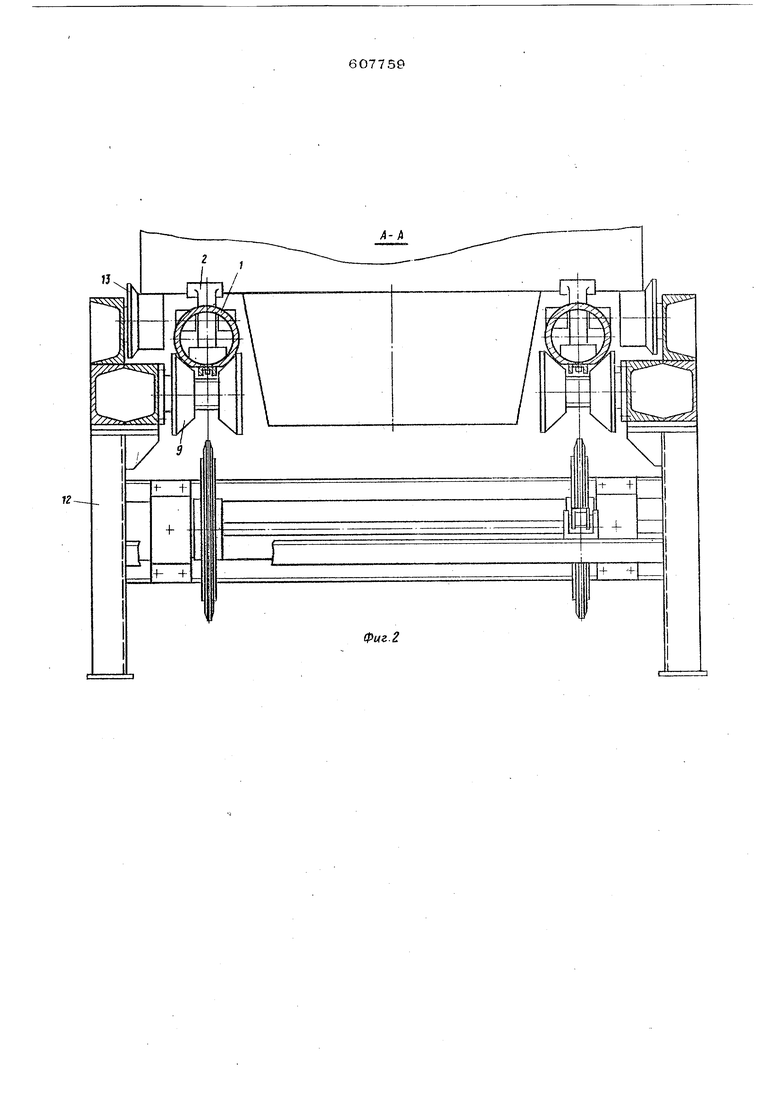
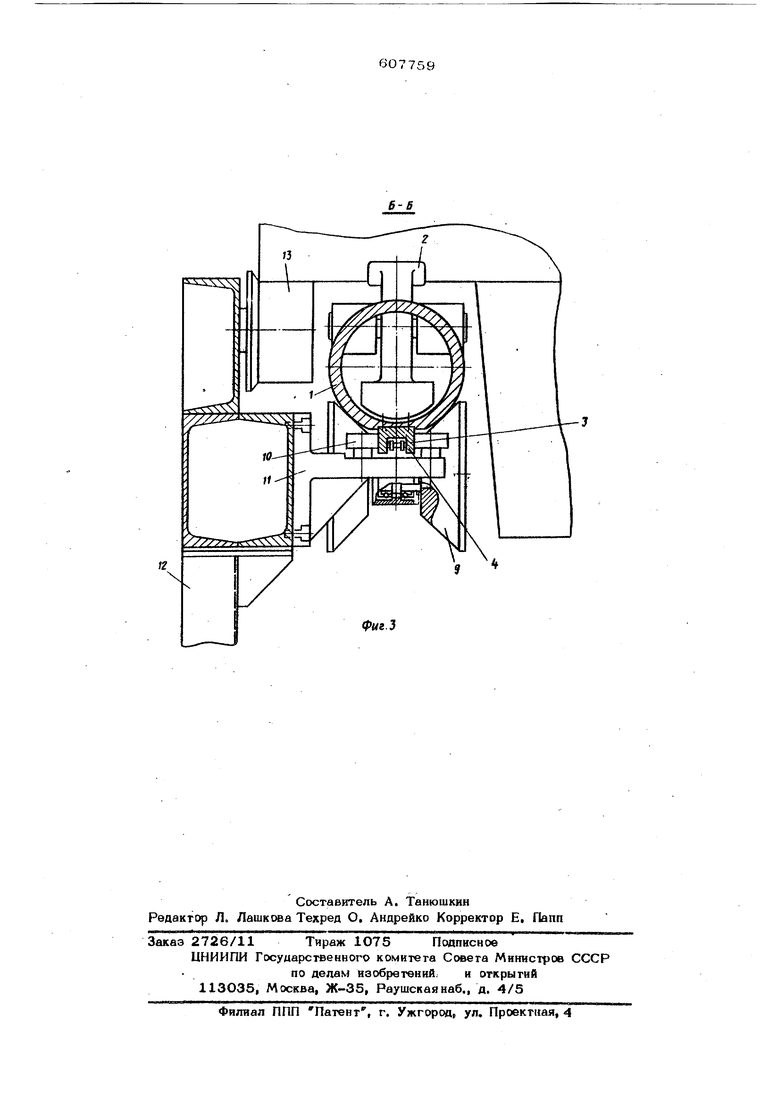
На фиг. 1 изображен предлагаемый конвейер, обший вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1 10 Предлагаемый конвейер имеет штангя 1, выполненные в внде труб. Каждая штанга 1 снабжена поворотными грузоведушнми кулаками 2. Снизу к штанге 1 прикреплена по всей длине П-образная направляющая 3, внуIjj ри которой размещен гибкий тяговый орган 4, связанный со штангой 1. Гибкий тяговый орган 4 представляет собой непрерывную цепь, установленную на приводной 5 и концевой 6 звездочках, натяжени е цепи производится с помощью натяжного ycTpcrftcTBa 7. Штанга 1 подучает воввратно-поступательное движение от привода 8, через гибкий тяговый орган 4. Каждая штанга 1 установлена на составных опорных роликах 25 О и парных боковых роликах 10, Боковые
ролики 10 установлены с вертикальной осью вращения и взаимодействуют с боковыми поверхностями П-образной направляющей, что предотвращает разворот штанг. Опорные ролики 9 состоят из двух крайних конусных и среднего ролика, причем диаметр среднего ролика выполнен меньше малого диаметра конусного, что дает возможность размещения тягового органа 4. Вращение среднего ролика выполнено независимо от кО нусных, что обеспечивает движение тягового органа 4 с меньшим сопротивлением.
Опорные 9 и боковые 1О ролики смонтированы на общих крошитейнах 11, закрепленных консольно внутри рамы 12. Рама снабжена консольным рольгангом 13. Приводная 5 и концевая 6 звездочки размещены ниже уровня щтанг, что поаэоляет прижимать щтанги к опорным роликам 9 и обеспечивать точность перемещения штанг. Габариты опорных ролйксж 9 не превышают толщину щтанги.
Конвейер работает следующим образом. Груз подается на рольганг 13 а зону действия первой пары грувоведущих кулаков 2 и при ходе щтанг вперед перемещается на следующую позицию. Затем щтанги возвращаются в исходное положение, при этом первая пара грузоведущих кулаков 2, отклоняясь на своих осях, проходит под вторым грузом, захватывает его, а первый груз 14 захватывается второй парой ку4
лаков 2. Штанги, совершая возвратно-поступательное движение от привода 8, перемещают грузы на следующую позицию. Таким образом грузы последовательно перемещаются по рольгангу 13.
Внедрение конвейера данной конструкции позволит высвободить зону между щтангами, что дает возможность транспортировать грузы с выступающей нижней частью, а это
расширит технологические возможности конвейера.
ормула изобретения
Шаговый конвейер для транспортирования штучных грузов, включающий штанги, установленные на опорах с возможностьювозвратно-поступательного движения, тяговый орган, связанный со штангой, и привод,
отличающийся тем, что, с целью обеспечения компактности, опоры выполнены из двух роликов, при этом тяговый орган непосредственно прикреплен к низу щтанги и размещен между роликами.
Источники информации, принятые во внимание при экспертизе:
№ 309883, кл. В 65 G- 25/00, 1969.
Ш
тгфиг.З
