(54) ШАГОВЫЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер-накопитель | 1983 |
|
SU1113329A1 |
| Шаговый конвейер-накопитель | 1978 |
|
SU747778A1 |
| Шаговый конвейер-накопитель | 1984 |
|
SU1191386A2 |
| Шаговый конвейер-накопитель | 1979 |
|
SU859259A1 |
| Шаговый конвейер | 1980 |
|
SU939350A1 |
| Шаговый конвейер | 1979 |
|
SU839903A1 |
| Шаговый конвейер для транспортирования и накопления штучных грузов | 1972 |
|
SU437671A1 |
| Автоматическая линия контроля корпусных деталей | 1988 |
|
SU1629232A1 |
| Автомат для контроля линейных параметров дисков фрикционов | 1975 |
|
SU766670A1 |
| ШАГОВЫЙ КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1967 |
|
SU201220A1 |
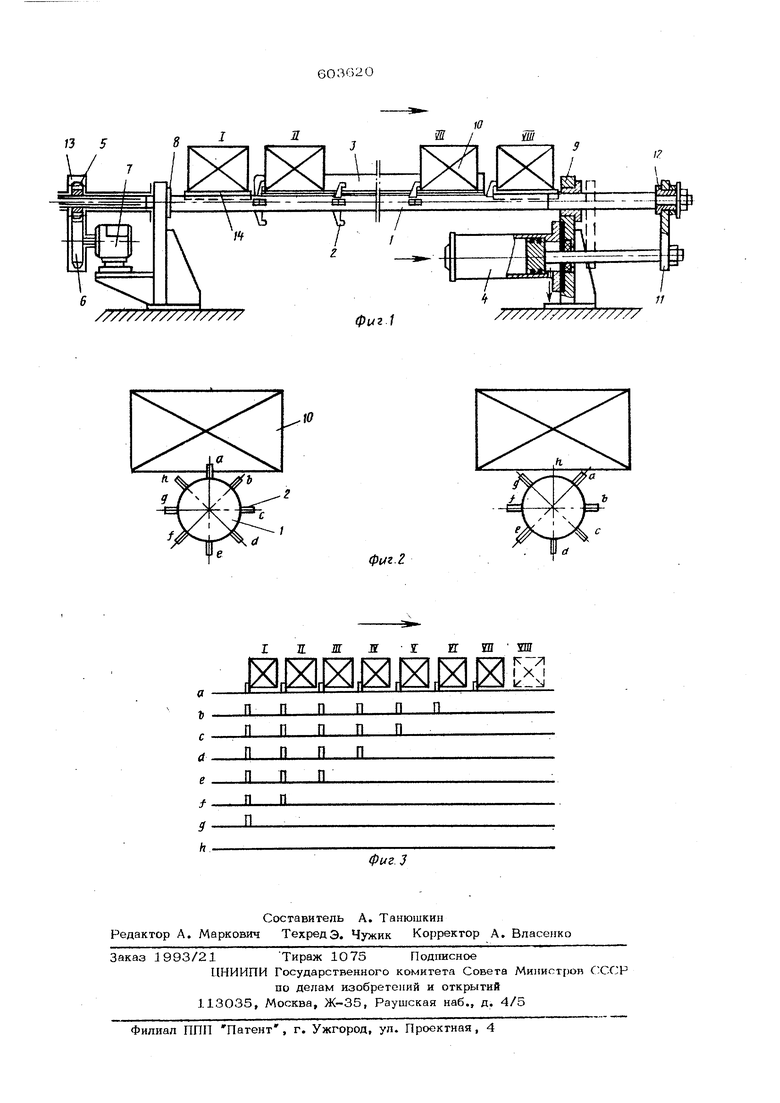
Изобретение относится к технике транспортирования и переработки тарно-штучных грузов. Известны шаговые конвейеры для трано портирования и накопления штучных грузов, выполненные в внде совершающей возвра1«но-поступательное движение штанги с подпружиненными толкающими кулачкакш. Каждый кулачок имеет механизм усуаиовки его в рабочее и нерабочее положение в ЗВЕШСИмости от наличия транспортируемого груза на последующей операции ij. Недостатком этого устройства является возможность транспортирования только тех грузов, позиции перед которвыми свободны. Наиболее близким техническим решением к предлагаемому изобретению является устройство, включающее неподвижные направля ющие, подвижную штангу, установленную с возможностыо. возвратно-поступательного движения и движения вокруг своей оси, упоры, жестко закрепленные на штанге, и приводы вращения штанги и возвратно-поступаj nbHoro движения J2j. Недостатком усгройсгва является невозможность накопления грузов при неравноме| ном и единичном Их поступлении, а также сложность конструкции рычага, снабженного устройствами для отсоединения его от поддона при прямом и обратном ходе. Целью изобретения является последовательное накрпл ние груаов на всех позициях как при равномерном, так и при неравномерном или даже единичном поступлении. Сущность изобретения состоит в том, что кулачки на штанге установлены параллельными группами, размещенными равиомер-но вдоль образующей штанги, с одной свободной образующей, причем каждая последующая группа содержит на один кулачок меньше. На фиг. 1 показано предлагаемое .устройство, общий вид; на фиг. 2 - одно из положений штанги при рабочем ходе и положение при обратном ходе; на фиг. 3 - группы кулачков в различных, секторах щтанги. Устройство состоит из штанги, I с кулачками 2, направляющих 3 дпя груза, привода 4 возвратно-поступательного движения штанги и привода поворота штанги, включающего шестерни 5 и 6, садящие соответст венно на шлицевом конце штанги и валу шагового электродвигателя 7i Штанга поддерживается опорами скольжения 8 и 9. Штанга разделена на восемь секторов, семь из которых (а, в, с, (3 , е,f ,g-)несут группы рабочих кулачков,а сектор является свободным. Рабочее перемещение штанги с грузом 1О производится приводом 4 (например, гидроципиндром)Пчерез кронштейн 11, когорый соединен со штангой через втулку 12 которая не препятствует повороту штанги, При перемещении штанги левый ее конец выполненный со шлицами, -перемещается oi носительно шестерни,5, которая закреплена от. осевого смещения в корпусе кожуха 13, Управление поворотом штанги осуществляется от датчика крайнего положения штан ги (при повороте в положение h в конце рабочего хода) и от датчиков наличия груза на позициях накопления (при повороте в одно из рабочих положений в конце f Ьбрарного хода). На фиг, 3 показаны позиции накопления 1-УШ. Лозиций 1-позиция подачи груза на накопитель с транспортного устройства 14 (например рольганга). Позиция УШ - позиция выдачи груза с накопителя. Работает устройство следующим образом При отсутствии груза на всех позициях накопителя и появления груза на позиции I штанга с кулачками в положении в совершает рабочее движение и передает, груз на позицию П. Повернувшись в положе ние 1(1 , штанга возвращается в начальное положение, поворачивается в положение в, передает груз на следующую позицию и так до полного заполнения накопителя. При пере мещении груза на позицию УШ штанга занимает .поиожение а,; В случае, если при подаче груза накопителв растично заполнен, например позиция занята, а остальные свободны, то в этом случае штанга при рабочем ходе занимает положение с и копит груз на позициях, включая .У 1. ЕСЛИ груз на накопитель поступает не-пвтоком, а в единичном виде, то заполнение его производится при различном положении штанги при рабочем ходе (при заполнении позиции УП положение в, У1 - с, У - d , 1У - е, Ш i f II - g). При вьщаче груза штанга в ра бочем ходе всегда занимает положение а. Наличие привода поворота дает возможность установить штангу в такое положение, когда вверху окажется либо требуемая группа кулаков (при рабочем ходе), либо со&сем не будет кулаков (при обратном ходе). Наличие группы кулаков разного количества позволяет вести накопление грузов после довательно на всех позициях как при равномерном, так и при неравномерном или даже единичном поступлении и выдаче грузов. Это дает возможность использовать жестко закрепленные неуправляемые кулаки простейшей формы. Использование в качестве привода поворота штанги шагового электродвигателя Тюзволяет применить для управления устройством простейшую счетно-импульсную схему на датчиках, контролирующих наличие груза на всех позициях накопителя. Шаговый конвейер можно использовать для связи транспортных линий, хранения межоперационного задела, в качестве склада оперативного запаса, в качестве технологического (например сборочного) конвейера во всех отраслях промышленности, ф.ормула изобретения Шаговый конвейер, включающий неподвижые направляющие, подвижную штангу, устаовленную с возможностью возвр(атнс -постуа тельного движения и движения/вокруг свой оси, ynoifei, жестко закрепленные на штане, и приводы вращения штанги и возвратнооступательного движения, отличаю и йен тем, что, с целью последователього накопления грузов на всех позициях ак при равномерном, так и при неравномером или даже единичном поступлении, кулачи на штанге установлены параллельными руппами, размещенными равномерно вдоль бразующей штанги, с одной свободной обраующей, причем каждая последующая група содержит на один кулачок меньше. Источники информации, принятые во вниание при экспертизе: 1,Авторское сЕидегепьстБО СССР 247851 кл. В 65 G 25/О8, 1968. 2.Патент CDJA № 35О4781, кп. 198-19, 970. ///// 7//////////// - P ---- -L//////////////////
.г
