(54) УСТРОЙСТВО ДЛЯ КОНТУРНОГО УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ
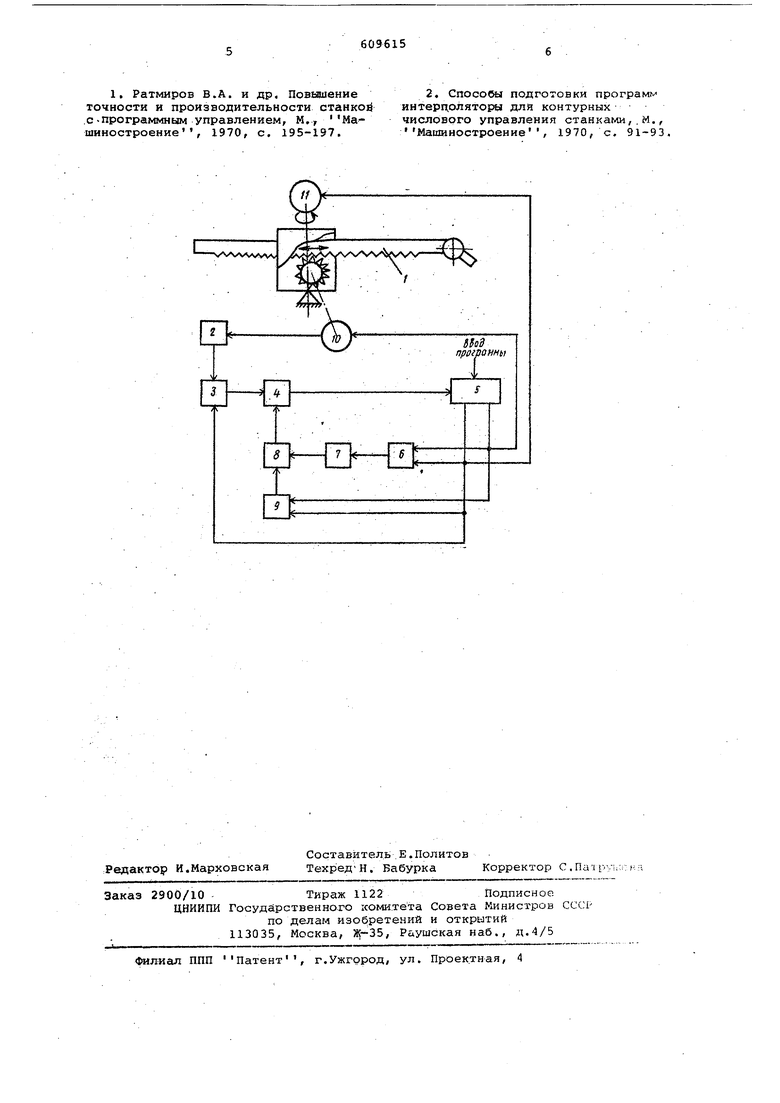
РОБОТОМ ния, второй вход - с первым выходом интерполятора, а выход - со вторым входом.генератора управляющих сигналов На чертеже представлена схема устройства для контурного управления про г влшленным роботом. Устройство содержит исполнительный механизм I, датчик 2 поступательного перемещения, ключ 3, генератор 4 управляющих сигналов, интерполятор 5, элемент и 6, элеме 1т 7 задержки, триггер 8, элемент ИЛИ 9, привод 10 nocTyi пательного перемещения, привод И поворота. Устройство работает следующим образом. При вводе программы в интерполятор 5 импульсы, следующие с выходов интер полятора 5, подаются на элемент И 6 и в случае наличия импульсов на обоих входах элемента И 6, запускают триггер 8, уменьшающий частоту генератора 4 управляющих сигналов. Следующийимпульс на любом из выходов интерполятора Ь гасит триггер 8 через элемент ИЛИ 9. Элемент 7 задержки задерживает запускающий импульс на время действия гасящего импульса. Таким образом устройство реализует метод изменения частоты генератора 4 управляющих сигналов в зависимости от того, поступил ли командный импульс с выхода, выдающего меньшее число импульсов, за предыдущий период следования импульсов с другого выхода, выдающего большее число импульсов. При поступательном перемещении исполнительного механизма 1 робота, осуществляемом приводом 10, датчик 2 выдает на ключ 3 сигналы, величина которых соответствует величине выдвижения исполнительного механизма 1. В качестве датчика 2 может служить многооборотный потенциометр, который включается в колебательный контур генератора 4 управляющих сигналов. Ключ 3, который также может быть элементом колебательного контура генератора 4 управляющих сигналов, от крызает или закрывает Дополнительное воздействие на его частоту в зависимости от наличия импулг са на втором выходе интерполятора 5, т.е. при наличии углового перемещения исполнительного механизма I, осуществля емого с помощью привода 11. В целом обеспечивается изменение пе риода следования каждого последующего импульса от генератора 4 управляю01ИХ сигналов в зависимости от наличия импульсов на обоих выходах или на вто ром выходе интерполятора 5 на предыдущем шаге. Величина дополнительной коррекции частоты генератора 4 управ.ляющих сигналов определяется величиной сигнала датчика 2, т.е. величиной выдвижения исполнительного механизма 1. Поскольку увеличении выдвижения исполнительного механизма 1, т.е. при увеличении радиуса поворота, цена единичного шага углового перемещения увеличивается, то с увеличением выдвижения частоту генератора 4 управляюгщихfсигналов необходимо уменьшить. ТеМ самым обеспечивается стабилизация при нятой контурной скорости. При управлении в цилиндрической системе координат робота дополнительная коррекция частоты генератора 4 управляющих сигналов в зависимости от наличия второго поступательного перемещения не производится. При управлении в сферической системе координат робота вводится второй на нал дополнительной коррекции по координате наклона исполнительного механизма, аналогичный каналу управления по координате поворота. Коррекция в этом случае осуществляется в двух взаимно перпендикулярных плоскостях, в каждой из которых реализуется управ ление для полярной систе м координат. Применение изобретения в системах управления промышленными роботами, например, для дуговой сварки, позволит значительно снизить погрешность стабилизации контурной скорости движения рабочего органа, например, сварочной ; головки, и тем самым повысить качество сварного соединения поскольку . скорость сварки и ее стабильность оказывают значительное влияние на формирование сварного шва. Формула изобретения Устройство для контурного управления прокышленным роботом, содержащее интерполятор, первый выход которого подключен через последовательно соединенные элемент И, элемент задержки триггер и генератор управляющих сигналов ко входу интерполятора, через элемент ИЛИ - ко второму входу триггера и через привод поворота - к исполни-, тельному механизму, второй выход интерполятора подключен непбсредственно ко вторым входам элемейтов И. и ИЛИ и через последовательно соединенные привод поступательного перемещения и исполнительный механизм - ко входу датчика поступательного перемещения, о т л и чающееся тем, что, с целью рас- ширения областн применения устройства, оно содержит ключ, первый.вход которого соединен с выходом датчика поступательного перемедения, .второй вход с первым выходом Интерполятсфа, а - со вторым входом генератора уп-; равляюисих сигналов. Источники информации, принятые во внимание при экспертизе:
1, Ратмиров В.А. и др. Повышение точности и производительности ставкой с-программным управлением, М., Машиностроение , 1970, с. 195-197.
2. CnocoWJ подготовки програм интердолятоЕ% для контурных числового управления станками, , М., Машиностроение, 1970, с. 91-93.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальное устройство для программного управления | 1978 |
|
SU748431A1 |
| Устройство для записи программы контурного управления промышленным роботом | 1978 |
|
SU930255A1 |
| Система программного управления для робота-манипулятора | 1978 |
|
SU744456A1 |
| Устройство для программного управления | 1980 |
|
SU920637A1 |
| Контурная система программного управления многокоординатным манипулятором | 1977 |
|
SU740491A1 |
| Контурная система программного управления | 1991 |
|
SU1800446A1 |
| Устройство для числового программного управления станками | 1985 |
|
SU1291928A1 |
| Устройство для программного управления | 1985 |
|
SU1290263A1 |
| Устройство для контурного программного управления | 1976 |
|
SU563668A1 |
| Линейный интерполятор для цифровых двухкоординатных систем програмного управления | 1973 |
|
SU499555A1 |
