Изобретение относится к области автоматики и- вычиспительной техники и может быть использовано при создании систем числового программного управления многокоординатныкм манипуляторами различного назначения. Известна система программного управ ления многокоординатным манипулятороМд содержащая блок управления, HirrepnonsiTO датчики перемещений, блок управления скоростями приводов и приводы, предназначенная для станков с числовым программным управлением по специально подготовленным программам i. Одна ко она не может быть использована для .целей создания обучающихся систем npoi раммного управления. Наиболее близкой к данному изобретению является система 2, содержащая блок обратной связи, выход которого непосредственно и через блок контроля обработки программы соединен соответственно с первым и вторым входами блока управления, первьй выход и третий ВХОД которого соединены с блоком памяти, а второй выкод - со вторым входом блока контроля обработки программы и с первым входом интерполятора, второй аход которого соединен с ввгходом генератора тактовых импульсов, а выходы со аходами приводов. Недостатками такой системы являются низкие скорости линейных и угловых перемещений, невозможность регулирования CKopcfcTH обработки программы и программирования аналитическим путем. Целью изобретения является расширение облвстк применения системы. Это достигается тем, что система содержит блок подготовки и коррекции программы н последовательно соединенные задатчик временного интервала, формирователь временного интервала и формирователь сигнала записи, второй вход которого подключен к выходу блока обратной связи, а выход к четвертому аходу SnoKa управления и второму входу формирователя временного интервала, третий
вход которого соединен с выходом генератора тактовых импульсов, третий выход блока управления через блок подготовки и коррекции программы подключен к пятому своему входу, а шестой аход блока управления соединен с выходом формирователя временного интервала.
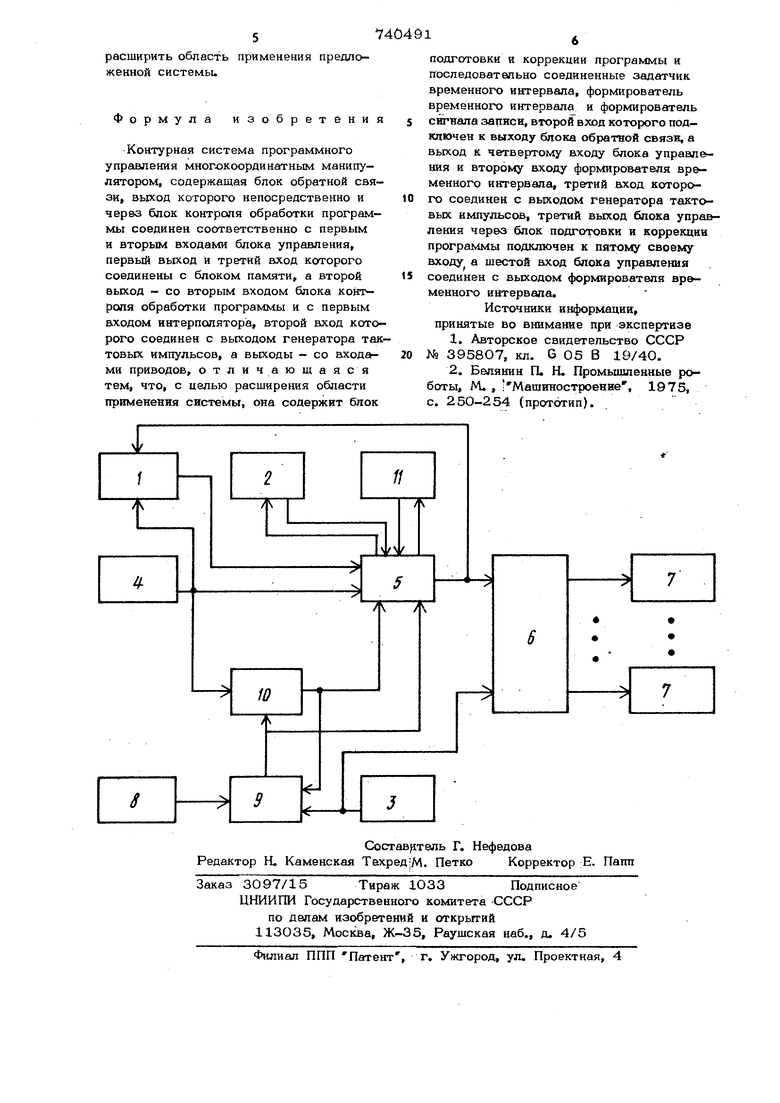
На чертеже представлена функциональная схема контурной системы программного управления многокоординатным манипулятором, на которой указаны блок 1 контроля отработки программы, блок памяти 2, генератор 3 тактовых импульсов, блок 4 обратной связи, блок 5 управления, интерполятор 6, приводы 7, задатник 8 временного интервала, формирователь 9 временного интервала, формирователь 1О записи, блок 11 подготовки и коррекции программ.
Система работает следующим образом.
Работа контурной системы программного управления многокоординатнь0у1 манипулятором основана на принципе программирования отдельньпс точек контура с дальнейшей отработкой данных, аппроксимированных отрезков интерполятором 6.
Режим обучения проводится путем обвода исполнительного органа манипулятора по необходимому контуру движения с требуемой скоростью. В процессе движения через определенные временные промежутки снимаются и записываются в блок памяти 2 текущие координаты точек по всем степеням подвижности, которые и характеризуют контур движения.
В режиме обучения с задатчика 8 временного интервала выбранная величина временного интервала записьюается в формирователь 9 временного интервала, в котором происходит подсчет импульсов, поступающих с генератора 3 тактовых импульсов, и формируются сигналы в конце каждого временного интервала. Эти сигналы поступают в формирователь Ю сигналов записи, куда также поступает информация о перемещении исполнительного органа манипулятора с блока 4 обратной связи по координатам. В формирователе Ю сигналов записи происходит сравнение приращений координат за текущий интервал времени . с предьщу- щнм и при равенстве приращений происходит обобщение движения в двух, трах и т.д. интервалах времени. Обобщение происходит до тех пор, пока неравенство приращений по одной из координат не составит величины, превышающей процент необходимой точности поддержания постоянной контурной скорости в системе, после чего формируется сигнал записи. По этому сигналу происходит запись в блок памяти 2 информации о перемещении, поступающей с блока 4 обратной связи по координатам, и информации о величине временного интервала, за который было произведено это перемещение, поступающей с формирователя 9 временного интервала.
Кроме того, в формирователе-Ю сигналов записи происходит оценка изменения знака перемещения и при появлении по одной из координат импульсов противоположного знака в. количестве, превышающем требование к точности аппроксимации для системы, сразу же, |ie ожидая конца временного интервала, происходит формирование сигнала записи, по которому информация о перемещении и величине временного интервала записьшается в блок памяти 2, а в формирователе временного интервала формируется следующий временной интервал. Далее запись программы происходит аналогичным образом до конца обвода оператором всего контура движения исполнительным механизмом робота. В блоке 11 подготовки и коррекции программ производится минимизация программы, а также, в режиме программирования, подготовка программы по рассчитанным контурам с учетом необходимой скорости перемещения. Затем производится запись программы отработки в блок памяти 2. В режиме воспроизведения записанной программы из блока памяти 2 информацию о перемещении и величине временного интервала записывают в интерполятор 6.
В интерполяторе 6 происходит интерполяция величины перемещения по координатам, записанной в блоке памяти 2, до полной отработки этой величины по каждой координате, определяемой блоком 1 контроля отработки программы. После отработки записанной информации происходит запись следующего кадра программы из блока памяти 2 в интерполятор 6. Отработка нового кадра производится аналогичным образом. Процесс повторяется до конца отработки всей программы.
Применение изобретения позволит за счет повышения скорости обработки программы возможности регулирования скорости отработки программы и аналитического программирования значительно
| название | год | авторы | номер документа |
|---|---|---|---|
| Программное задающее устройство | 1981 |
|
SU991376A1 |
| Устройство для программного управления многокоординатным манипулятором | 1981 |
|
SU985762A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Устройство для программногоупРАВлЕНия МНОгОКООРдиНАТНыММАНипуляТОРОМ | 1978 |
|
SU807215A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Многокоординатный цифровой интерполятор | 1984 |
|
SU1200246A1 |
| Устройство для программного управления | 1986 |
|
SU1397878A1 |
| Устройство для сварки | 1987 |
|
SU1563916A1 |
| Система контурного управления промышленного робота | 1986 |
|
SU1430256A1 |
| Устройство для программного управления приводом | 1978 |
|
SU702350A1 |
