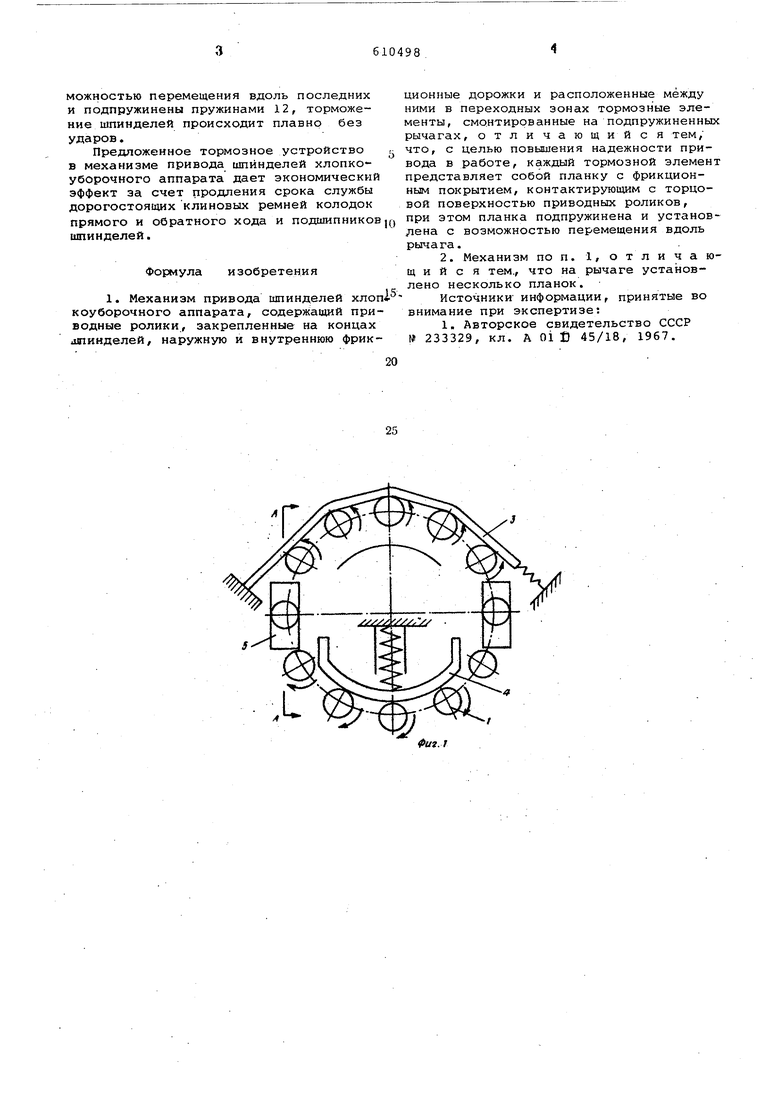
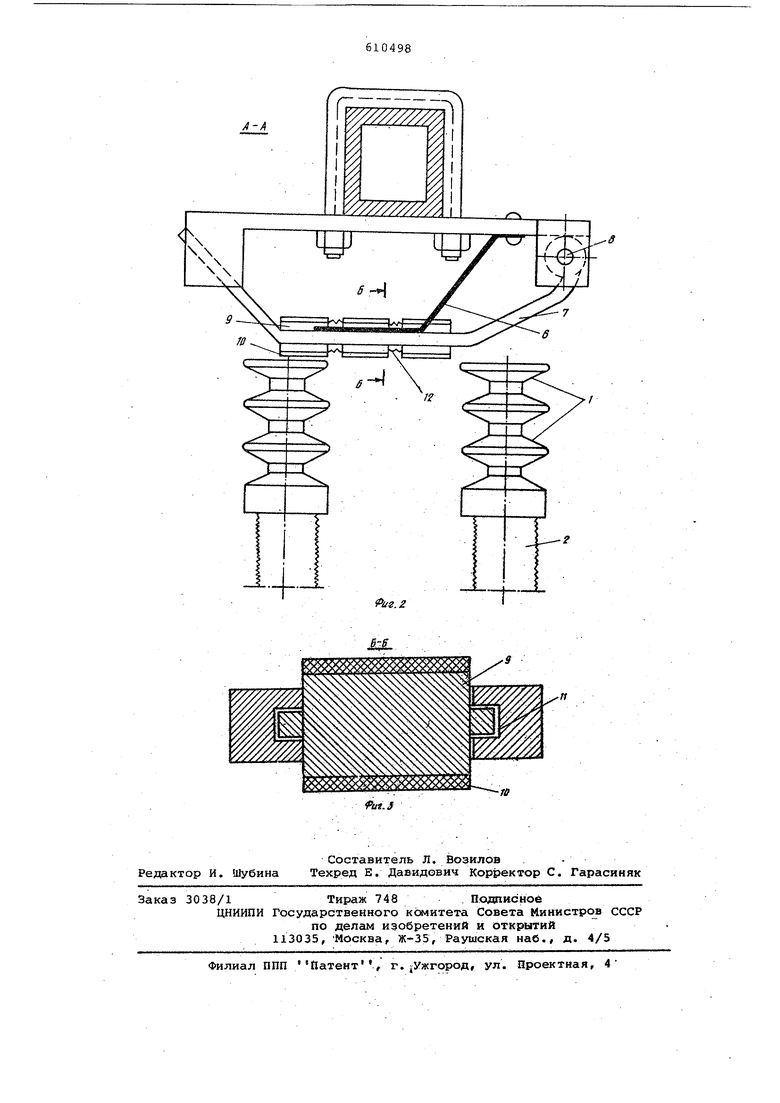
Изобретение относится к области сельского хозяйства и может быть использовано в машинах для уборки хлопка-сырца с кустов хлопчатника. Известен механизм привода шпинделе хлопкоуборочного аппарата, содержащий приводные ролики, закрепленные на кон цах шпинделей, наружную и внутреннюю фрикционные дорожки и расположенные между ними в переходных зонах тормозные элементы, сг-.онтированныё на подпр жиненных рычагах. Известный механизм не обеспечивает достаточно эффективного торможения шпинделей. В предложеннсм механизме привода для повьшения надежности его в работе каждый тормозной элемент выполнен в виде планки с фрикционным покрытием, контактирующим с торцовой поверхность приводных роликов шпинделей, при э.тсм планка подпружинена и установлена с возможностью перемещения вдоль рычага Нарычаге может быть установлено несколько планок. На фиг. Г изображен предложенный привод, вид сверху; на фиг. 2 - разре по А-. фиг. 1; на фиг. 3 - разрез по Б-Б на фиг. 2. Механизм привода содержит приводные ролики 1, закрепленные на концах шпинделей 2, наружную 3 и внутреннюю 4 фрикционные дорожки и расположенные между ними в переходных зонах тормозные элементы 5, смонтированные на подпружинненных пружиной 6 рычагах 7, один конец которых закреплен на шарнире 8 Каждый тормозной элемент состоит из одной или нескольких планок 9 с ф рикционн{л«1 локрытиём 10, установленных в пазах пощгружиненного рычага с возмо« ностью перемещения вдоль последнего. Планки (Связаны пружиной 12. . В npiouecce работы хлопкоуборочного аппарата ролики 1 ишинделей 2, соприкасаясь в рабочей зоне с наружной фрикционной дорожкрй 3, получают вращение вокруг своей оси; Сойдя с дорожки, ролики своими торцами заходят, под тормозной элемент 5. Благодаря креплению рычага 7 на шарнире 8 и постоянн(Я4у его прижатию пружиной 6 происходит равномерная передача усилия на каждый торец роликов через планку 9 с фрикционным покрытии .10, обеспечивая остепенное торможение шпинделей. Вследствие того, что -планки 9 в пазах 11 рычагов 7 установлены с возможностью перемещения вдоль последних и подпружинены пружинами 12, торможение шпинделей происходит плавно без ударов.
Предложенное тормозное устройство в механизме привода шпинделей хлопкоуборочного аппарата дает экономический эффект за счет продления срока службы дорогостоящих клиновых ремней колодок прямого и обратного хода и подшипникое шпинделей.
Формула изобретения
1. Механизм привода шпинделей хлопХ коуборочного аппарата, содержащий приводные ролики, закрепленные на концах шпинделей/ наружную и внутреннюю фрикционные дорожки и расположенные между ними в переходных зонах тормозные элементы, смонтированные на подпружиненных рычагах, отличающийся тем/ что, с целью повышения надежности привода в работе, каждый тормозной элемент представляет собой планку с фрикционным покрытием, контактирующим с торцовой поверхностью приводных роликов, при этом планка подпружинена и установлена с возможностью перемещения вдоль рычага.
2. Механизм по п. 1, о т л и ч а ющ и и с я тем., что на рычаге установлено несколько планок.
Источники информации, принятые во внимание при экспертизе:
1. Авторское свидетельство СССР № 233329, кл. А Oi В 45/18, 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм привода шпинделей барабана хлопкоуборочной машины | 1982 |
|
SU1039459A1 |
| Привод шпинделей хлопкоуборочного аппарата | 1990 |
|
SU1787359A1 |
| Механизм привода шпинделей барабана хлопкоуборочной машины | 1980 |
|
SU957789A1 |
| МЕХАНИЗМ ПРИВОДА ШПИНДЕЛЕЙ ВЕРТИКАЛЬНО- ШПИНДЕЛЬНОГО ХЛОПКОУБОРОЧНОГО АППАРАТА | 1968 |
|
SU221410A1 |
| Шпиндель хлопкоуборочного аппарата | 1984 |
|
SU1245278A1 |
| МЕХАНИЗМ ПРИВОДА ШПИНДЕЛЕЙ ВЕРТИКАЛЬНО- ШПИНДЕЛЬНОГО ХЛОПКОУБОРОЧНОГО АППАРАТА | 1968 |
|
SU209117A1 |
| Хлопкоуборочный аппарат | 1990 |
|
SU1761032A2 |
| МЕХАНИЗМ ПРИВОДА ШПИНДЕЛЕЙ ХЛОПКОУБОРОЧНОЙ МАШИНЫ | 1967 |
|
SU223501A1 |
| МЕХАНИЗМ ПРИВОДА ШПИНДЕЛЕЙ ХЛОПКОУБОРОЧНОГОАППАРАТА | 1969 |
|
SU233329A1 |
| Привод шпинделей барабана хлопкоуборочного аппарата | 1982 |
|
SU1042654A1 |
,L
иг.1
