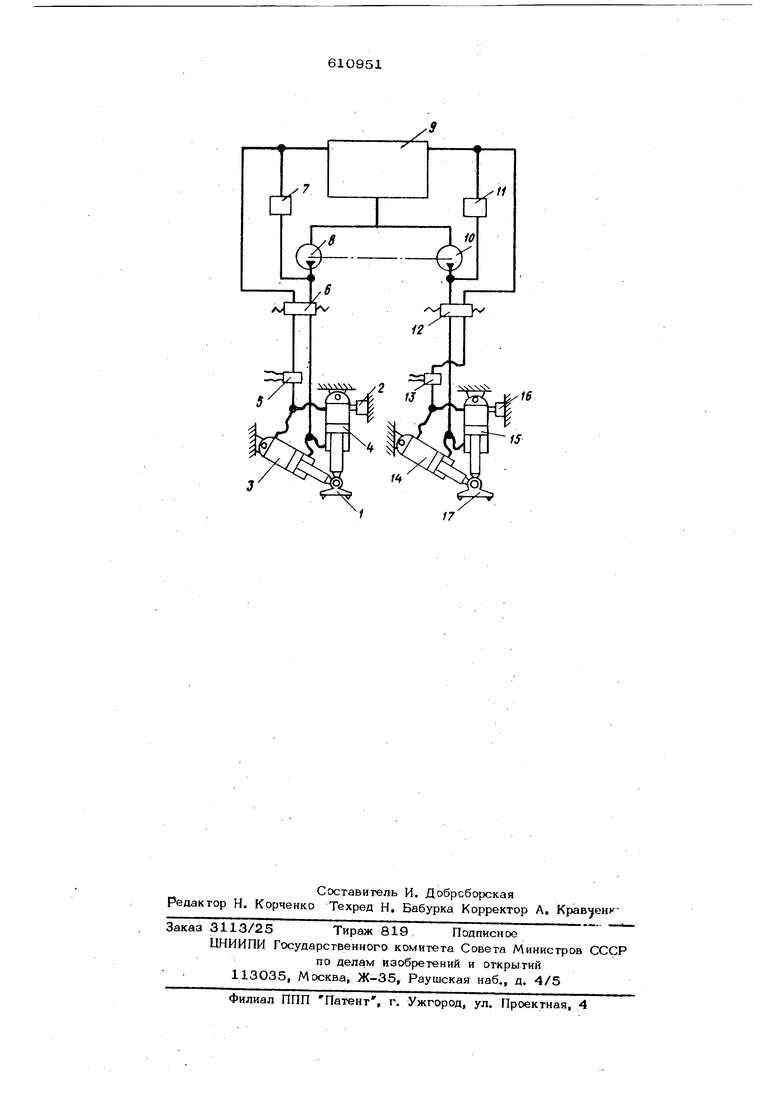
Изобретение относится к гидравлическим приводам механизма шагания, а именно к гидравлическим приводам механизма шагания тягачей. Известны гидравлические приводы меха- низмов шагания Экскаваторов и других сам ходных повозок, включающие шарнирно связанные с рамой гидроцилиндры, штоки кото .рых попарно соединены с башмаками, насос ные установки, золотники управления, разгру&очные клапаны, трубопроводы и бак, обеспечивающие перемещение экскаваторов, повозок или тягачей- (l. Известен также гидравлический привод механизма шагания тягача, содержащий рабочие и вспомогательные цилиндры, насосные установки, золотники управления, предохранительные клапаны, бак и гидравличе кие магистрали , Известные устройства не обеспечивают плавного автоматического шагания независимо от неровностей дорожного покрытия. Целью изобретения является обеспечение равномерного автоматического шагания независимо от неровностей дорожного покрытия, т.е. обеспечение равномерного движения тягача при больших начальных нагрузках и неровностях дороги. Цель достигается тем, что магистрали подвода рабочей жидкости к верхним полостям гидроцилиндров снабжены электрогидравлическими датчиками, а вспомогательные цилиндры снабжены электромеханическими датчиками угла поворота цилиндров, соединенными с золотниками управления. Эти датчики в зависимости от давления жидкости в Ц1.линдрах и угла наклона их переключают золотники управления и обеспечивают плавное шагание башмаков и равномерное движение тягача. На чертеже представлена принципиальная схема описываемого привода. Гидравлический привод механизма шагания тягача включает башмак 1, электромеханический датчик 2 угла поворота цилиндров, толкающий гидроцилиндр 3, вспомогательный гидроцилиндр 4, электрогидравлический датчик 5, золотник управления 6, предохранительный клапан 7, насос 8, бак 9, насос 10, предохранительный клапан 11, золотник управления 12, элекгрогидравлический Датчик 13, толкающий гидроцилиндр 14, вспомогательный гидроцилиндр 15, электромеханический датчик 16 угла поворота цилиндров и башмак 17.
При включении золотника управления 6 вспомогательный гидроцилиндр 4 опускает башмак 1 на дорогу и нагружает его весом тягача, а толкающий гидроцилиндр 3 перемещает тягач вперед. Выполнив часть шага, толкающий и вспомогательный гидpoц лин ры 3 и 4 включают электромеханический датчик 2 угла поворота пилигщров, который подает сигнал на срабатывание золотника управления 12, подающего рабочее давление на толкающий-и вспомогательный гидроцилиндры 14 и 15, Башмак 17 опускаетсяна дорогу. При этом в момент опирания башмака 17 на дорогу давление жидкости в подводящем трубопроводе повышается, включается электрогидравлический датчик 13, отрегулированный примерно на 1/3 максима:льного давления в. -гидросистема, и подает сигнал на срабатывание золотника управления 6, который переключает толкающий и вспомогательный гидроцилиндры 3 и 4 на подт51гивание башмака 1 в исходное положение. Таким образом, смена башмаков при шагании происходит плавно при одновременном нарастании нагрузки на один башмак и снятии нагрузки с другого башмака. Толкающий и вспомогательный гидроцилшздры 14 и 15 башмака 17, выполнив часть шага, включают электромеханический датчик 16 угла поворота цилиндров, дающий сигнал на срабатывание золотника управления 6, который .включает толкающий и вспомогательньй гвдроцилиндры 3 и 4 на выполнение башмаком. 1 очередного шага. В момент опускания на дорогу и нагружения
башмака 1 от повышения давления рабочей жидкости в подводящем трубопроводе включается электрогидравлическйй датчик 5 и подаст сигнал iia срабатывание золотника управления 12, включающего толкающий и вспомогательный гидрсщилиндры 14 и 15 на подтягивание башмака 17 в исходное положение. Таким образом, происходит автоматическое шагание тягача.
Насосы 8 и 10 подают рабочую жидкость из бака 9 в систему, а предохранительные клапаны 7 и 11 предохраняют гидросистему от перегрузок давления.
Предложенный гидравлический привод механизма шагания обеспечивает равномерное тяговое усилие тягача независимо от неровностей дороги, причем процесс шагания происходит автоматически.
Формула изобретения
Гидравлический привод механизма шагания тягача, содержащий рабочие и вспомогательные цилиндры, насосные установки, золотники управления, предохранительные клапаны, бак и гидравлические магистрали, отличающийся тем, что, с целью обеспечения равномерного автоматического шагания, магистрали подвода рабочей жидкости к верхним полостям гидроцилиндров снабжены электрогидравлическимисщатчиками , а вспомогательные цилиндры снабжены электромеханическими датчиками угла поворота цилиндров, соединенными с золотниками управления.
Источники информации, принятые во внимание при -экспертизе:
1. Авторское свидетельство № 255135 кл. Е 02 Г 9/04, 1968.
2,, Авторское свидетельство N° 174559, кл. Е 02 Р 9/22, 1962.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕДВИЖНАЯ УСТАНОВКА ДЛЯ ВОЗБУЖДЕНИЯ СЕЙСМИЧЕСКИХ ВОЛН | 2005 |
|
RU2289150C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2001 |
|
RU2220431C2 |
| ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО СОЛНЕЧНОГО ТРЕКЕРА | 2021 |
|
RU2769457C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1991 |
|
RU2029890C1 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| Электрогидравлическая рулевая машина | 1980 |
|
SU921963A1 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ТРЕХПОЗИЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С РЕЗЕРВИРОВАННЫМ ЭЛЕКТРОУПРАВЛЕНИЕМ ПРИВОДА ПОВОРОТА КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДЕМПФЕРОМ | 2007 |
|
RU2342283C1 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| Электрогидравлическая система привода двухстворчатых ворот шлюза | 1986 |
|
SU1472565A1 |
| Гидропривод подъемного устройства механизма шагания экскаватора | 1987 |
|
SU1555438A1 |