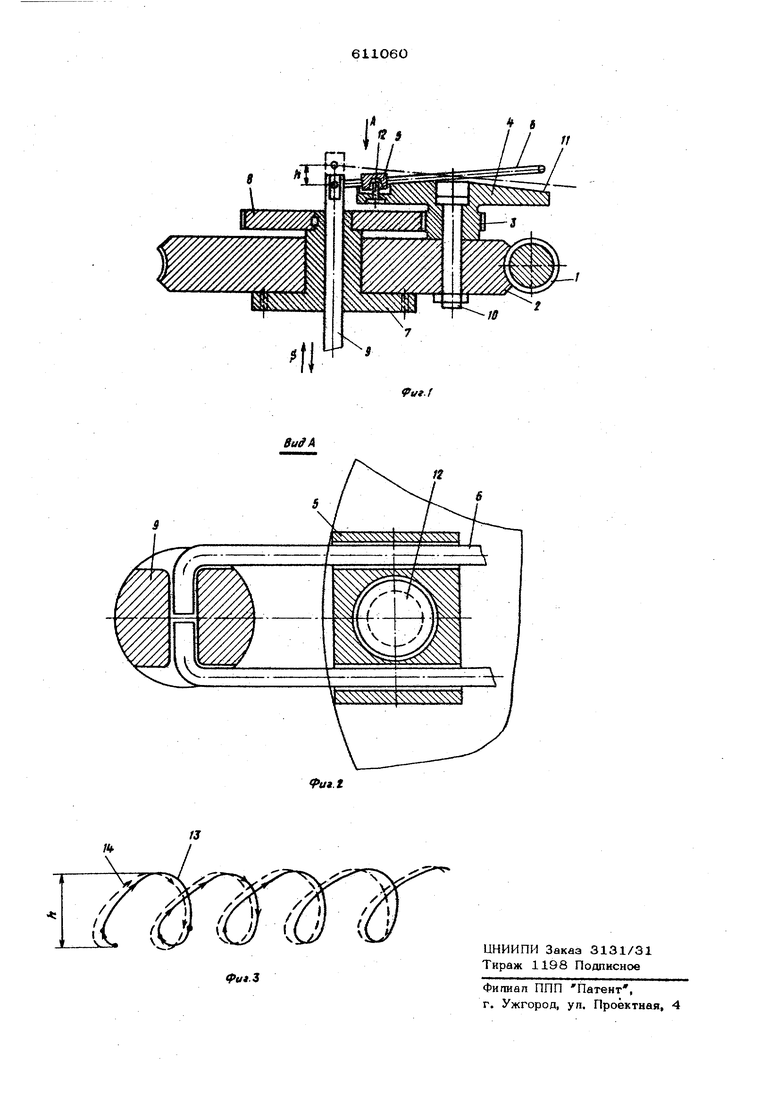
На фиг. 1 схематичесжи изображен описываемый механизм:, продольный разрез; на фиг. 2 вид А иа фиг, Ij на фиг, 3 развертка траектории движения условной точки, принадлежащей притираемой поверл ности пробки крана, закрепленной на ведомом валу. Механизм содержит червяк 1 (см. фиг. червячное колесо 2, сателлитную шестерню, 3, жестко связанный с ней кривошип 4с ползуном 5, взаимодействующий с ползу« ном кулисный рычаг 6, соединенное с неподвижной стойкой 7 неподвижное зубча тое колесо 8 и ведомый вал 9. Зацепляюща яся с - неподвижным . колесом 8 сателлить ная шестерня 3 ; установлена на червячном колесе 2 с возможностью вращения относительно пальца 10, Кривошип 4 выполнен в виде конического диска, с конической поверхностью 11 которого контакта рует кулисный рычаг 6, соединенный с ведo fым валом 9 (см, фиг. 2) шарнирно. В механизме вращательное движение червяка 1 (см, фиг. l) передается колесу 2, которое обкатывает сателлитную шеетерню 3 по неподвижному колесу 8. Далее вращательное движение сателлитной шестерни 3 с помощью кривощипа 4 и ползуна 5 преобразуется в качательное движение кулисного рычага б и связанного с ним ведомого вала 9 вокруг оси его вращения. Вместе с тем, при вращении кривошипа 4 вокруг пальца Ю ползун 5 и коническая поверхность 11 кривошипа 4 сообщают ку- лисному рычагу 6 дополнительное качатель ное движение вокруг шарового шарнира 12 ползуна в плоскости, образованной осью вращения .ведомого вала 9 и шаровым; шарн ром 12. Такое дополнительное качательное движение кулисного рычага 6 вызывает возвратно-поступательное движение ведомого вала 9 вдоль оси его вращения по стрел ке 2 (см. фиг. 1). Полное перемещение Вала 9 ограничивается величиной Vl, злви- сящей от величины конусности поверхности. 11 кривошипа 4 При использовании механизма для притирки уплотннтельных поверхностей пробковых кранов пробку последнего соединяют с ведомым валом 9, а седло крана связывают с неподвижной стойкой 7, В процессе при- тнрки условная точка, принадлежащая поверхности пробки, совершает сложное проотранственное движение. Развертка траектории движения этой точки, соответствующая первому обороту пробки, показана на фиг. 3 кривой 13. Применение в механизме, шестерни 3 и зубчатого колеса И (см. фиг, 1) с взаимно простыми числами зубьев обеспечивает несовпадение трактооин 13 левого оборота условной точки с траекторией 14 второго оборота названной точки. Дополнительное возвратно-поступательное движение ведомого вала механизма позволяет применить его для притфки уплотннтельных поверхностей пробковых кранов, а использование в механизме зубчатых колес с взаимно простыми числами зубьев позволяет повысить производительность обработки и качество уплотнительных поверхностей. Формула изобретения Механизм для преобразования врашательякого движения ведущего вала в качател ное движение одного или нескольких ведомых валов по авт. св. № 132019, о тличающийся тем, что, с целью получения также возвратно-поступательного движения ведомого вала и расширения технологических возможностей механизма, кулисный рычаг соединен с ведомым, валом посредством шарнира, ось которого перпендикулярна оси ведомого вала, и связанный с рычагом кривошип выполнен в виде конического диска, а числа зубьев неподвижного центрального колеса и сателлитной шестерни взаимно простые.
8 ;
6
ff
f0