(54) СПОСОБ УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ШАХТНОЙ
ПОДЪЕМНОЙ УСТАНОВКИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ дискретного управления тормозом шахтной подъемной машины | 1989 |
|
SU1715705A1 |
| Способ управления предохранительным торможением подъемной машины | 1990 |
|
SU1801914A1 |
| Система и способ управления пневматическим приводом вагонного замедлителя | 2020 |
|
RU2750559C1 |
| Гидравлический многоэлементный дисковый тормоз | 1976 |
|
SU654812A1 |
| СПОСОБ ТОЧНОЙ ОСТАНОВКИ ПОЛА КАБИНЫ ЛИФТА НА УРОВНЕ ПОСАДОЧНОЙ ПЛОЩАДКИ | 2001 |
|
RU2202508C2 |
| Автоматизированная система и способ управления пневматическим приводом вагонного замедлителя | 2020 |
|
RU2758581C1 |
| Система и способ управления пневматическим приводом балочного вагонного замедлителя | 2023 |
|
RU2800782C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2749620C1 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗОМ ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2614468C2 |
| Способ дискретного управления предохранительным торможением | 1976 |
|
SU659517A2 |
1
Изобретение касается подъемно-транспортных устройств и может использоваться для управления торможением шахтных подъемных установок.
Наиболее близким по технической сущнести является способ управления торможением шахтной подъемной установки, при котором торможение производят в соответствии с заданной программой, а диапазон тормозного момента разделяют на ряд одинаковых соединений и используют по одному исполнительному элементу для торможения на каждой ступени l .
Однако такой способ имеет сравнительно невысокую надежность и недостаточную безопасность, обусловленную скачкообразным изменением величины тормозного момента и значительными динамическими нагрузками на механическую часть подъемной установки,
Нель изобретения - повышение надежности и безопасности путем устранения скачкообразного изменения динамических нагрузок на механическую часть подъемной установки.,Цель достигается тем, что формируют дополнительный аналоговый управляющий сигнал, который подают на один исполнительный элемент одновременно с дискрет ным включением ряда исполнитепьнътх элементов, на которые подают дискретный управляющий сигнал, причем выбирают постоянные пороги срабатывания дискретно включаемых исполнительных элементов и определяют количество последних по cooi ношению между уровнем сигнала заданной программы и постоянными порогами срабатывания, а величину дополнительного аналогового управляющего сигнала определяют по разности между уровнем сигнала заданной программы и сигналом, пропорциональным максимальному порогу срабатывания включенных в данный момент дискретно управляемых элементов.
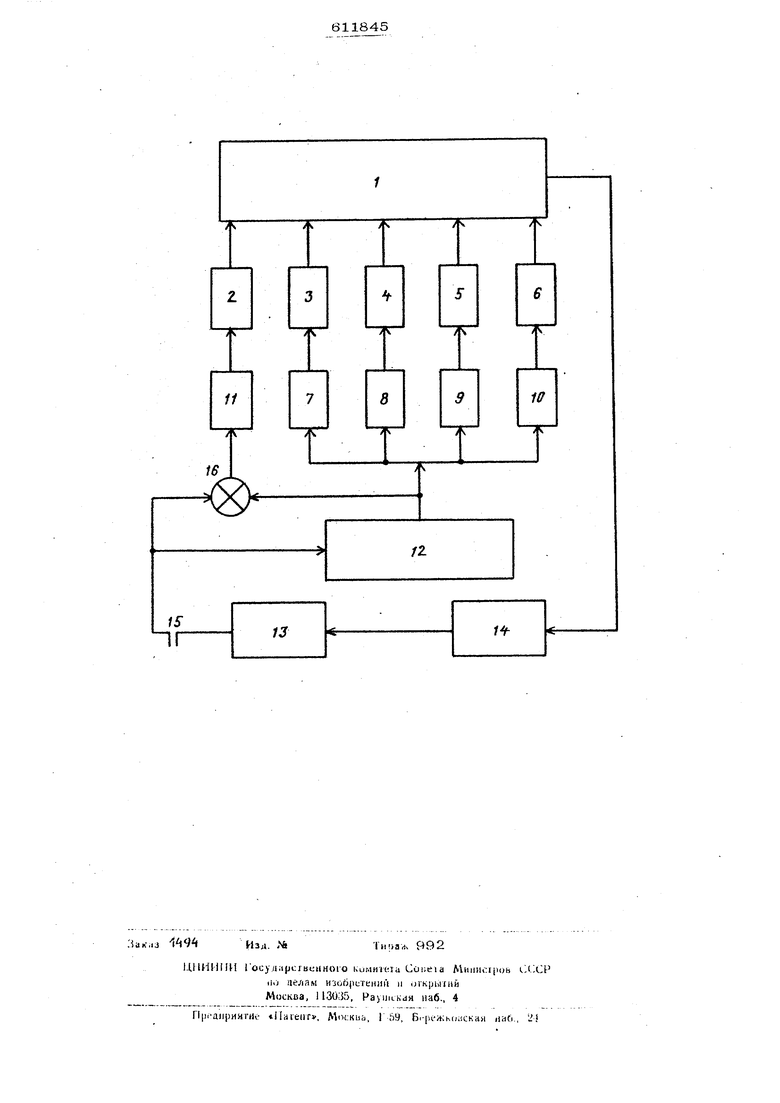
На чертеже представлена блок-схема устройства, осуществляющего предлагаемый способ.
Устройство содержит подъемную ycTanoiку 1 (объект рег-улирования), исполнител1уные элементы 2-6 тормозного устройства, воздействующие в процессе торможения на подъемную установку, пороговые элементы 7-10, осуществляюшие дискретное управ ленне работой исполнительных элементов 3-6, блок 11 аналогового управления, BI ход которого подключен к .аналаго-регу,лируемому исполнительному элементу 2, блок 12 формирования сигнала, соответствуюшего включенному в данный момент пороговому элементу с максимальной уста кой (порогом) срабатывания, блок 13 про граммирования, служащий для формирования программного сигнала, соответствующего требуемой величине тормозного момента в за висимости от конкретной ситуа ции, предшествующей началу торможения, блок 14 датчиков, определяющих фактические параметры движения подъемной маши ны и служащих для формирования програм мы торможения н контроля выполнения, контакт 15 датчика начала торможения, осуществляющий подключение программного устройства после поступления команды на начало торможения, вычитающее устройство 16. Весь диапазон тормозного момента разбивают на ряд одинаковых ступеней величиной Миакс где а число исполнительных элементов; { tv-1) элементов включают дискретно и ка)иГдый нз них при включении создает тррмозной момент М,, М, М MLBM 1 2 п-1п, Один исполнительный элемент управляется аналоговым сигналом с диапазоном изменения тормозного момента в пределах от /чМ О После понучения команды на начало торможения замыкается контакт 15 н программный сигнал с выхода блока 13 (через блок 12) поступает на пороговые элементы 7-10. Каждый из этих элементов включает свой 1 сполнительный элемен 3-6, если уровень программного сигнала будет больше или равен установленному порогу срабатывания элементов 7-10. Та ким образом, например, при выбранных порогах срабатывания 2в, 4Б, 6в и 8в соотве1х:твенно для элементов 7, 8, 9 и 10 и уровне программного сигнала 6, 2в включаются элементы 7, 8, ,9 и управляе мые ими - 3, 4, 5. Максимальная уставка включенных элементов 6 в. Этот уровень соответствук5щим образом формируется в блоке 12 и подается на вычитающее устройство 16, на другой вход которого поступает программный сигнал величиной 6, 2 в. На выходе вычитающего устройства образуется сигнал 0,2 в, который подается на блок 11 аналогового управления, связанный с исполнительным элементом 2. Исполнительный элемент 2 создает тормозной момент, соответствующий уровню входного сигнала 0,2 в. Аналогичным образом процесс управления протекает при изменении уровня программного . Формула изобретения Способ управления, торможением щахтной подъемной установки, при котором тор- ; можение производят в соответствии с заданной программой,, а диапазон тормозного момента разделяют на ряд одинаковых ступеней и используют по одному исполнительному элементу для торможения на каждой ступени, отличающийся тем, что, с целью повышения надежности и повышения безопасности путем устранения скачкообразного изменения динамических нагрузок на механическую часть подъемной установки, формируют дополнительный аналоговый управляющий сигнал, который подают на один исполнительный элемент одновременно с дискретным включением ряда исполнительных элементов, на которые подают дискретный управляющий сигнал, причем выбирают постоянные пороги срабатывания дискретно включаемых исполнительных элементов и определяют количество последних по соотношению между уровнем сигнала заданной программы и постоянными порогами срабатывания, а величину дополнительного аналогового управляющего сигнала определяют по разности между уровнем сигнала заданной программы и сигналом, пропорциональнь(м максимальному порогу срабатывания включенных в данный момент дискретно управляемых элементо в. Источники информации, принятые во внимание при эксперт 1зе 1. Авторское свидетельство CCCF № 325213, В 66В 5/18, О9.О6.69 (прототип).
