1
Изобретение относится к области грузонодъемных механизмов.
В основном изобретении по авт. св. № 325213 описан способ дискретного управления предохранительным торможением шахтных подъемных машин, основанный на использовании многоприводного исполнительного органа тормозной системы, согласно которому включение каждой последуюшей ступени торможения производится с выдержкой времени в соответствии с сигналом, вырабатываемым группой датчиков замедления по способу голосования .
Данный способ обеспечивает заданный уровень замедления машины, однако датчики замедления ие учитывают периода колебаний подъемных сосудов, вследствие чего при торможении могут возникать значительные колебания подъемных сосудов и высокие динамические нагрузки на ветвях канатов.
Целью изобретения является повышение надежности и долговечности подъемной установки и ее элементов за счет снижения динамических нагрузок при предохранительном торможеиин.
Цель достигается тем, что первую ступень торможения накладывают после отключения двигателя но истечении временн, равного нолупериоду колебании подъемного сосуда (для двухконцевых подъемных установок - сосуда на короткой ветви), с тормозным моментом, равным двигательному, затем тормозной момент увеличивают
парными ступенямн, прн этом добавки тормозного момента на каждой ступени в пределах одной пары равны между собой, а время между ними равно нолунериоду колебаний сосуда.
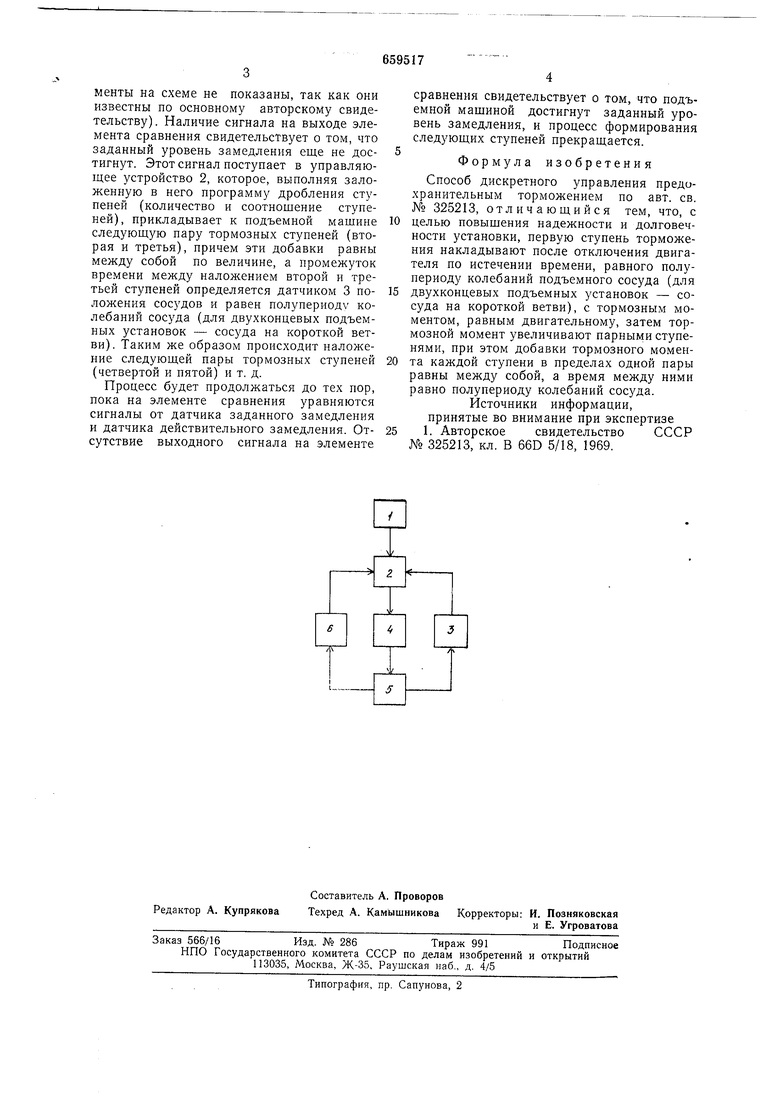
На чертеже нредставлена блок-схема устройства унравлення предохранительным торможением по данному способу.
По сигналу от цепи 1 зашиты подъемной установки унравляюшее устройство 2 через
определенный промежуток времени после отключеиия двигателя, определяемый датчиком 3 положения сосудов и равпый полупериоду колебаиий сосуда (для двухконцевых подъемных установок - сосуда на короткой ветви), дает команду исполнительному механизму (тормозу) 4 на приложение к объекту управлеиия (иодъемиой машине) 5 первой ступени торможения с тормозным моментом, равным двнгательному,
который определяется датчиком 6 нагрузкн. Контроль получаемого при этом замедления осуществляется датчиком действительного замедления путем сравнения его сигнала с сигналом от датчика заданного замедлеппя на элеме 1те сравнення (эти элементы на схеме не показаны, так как они известны по основному авторскому свидетельству). Наличие сигнала на выходе элемента сравнения свидетельствует о том, что заданный уровень замедления еще не достигнут. Этот сигнал поступает в управляющее устройство 2, которое, выполняя заложенную в него программу дробления ступеней (количество и соотнощение ступеней), прикладывает к подъемной мащине следующую пару тормозных ступеней (вторая н третья), причем эти добавки равны между собой по величине, а промежуток времени между наложением второй и третьей ступеней определяется датчиком 3 положения сосудов и равен полупериоду колебаний сосуда (для двухконцевых подъемных установок - сосуда на короткой ветви). Таким же образом происходит наложение следующей пары тормозных ступеней (четвертой и пятой) и т. д.
Процесс будет продолжаться до тех пор, пока на элементе сравнения уравняются сигналы от датчика заданного замедления и датчика действительного замедления. Отсутствие выходного сигнала на элементе
сравнения свидетельствует о том, что подъемной мащиной достигнут заданный уровень замедления, и процесс формирования следующих ступеней прекращается.
Формула изобретения
Способ дискретного управления предохранительным торможением по авт. св. № 325213, отличающийся тем, что, с целью повышения надежности и долговечности установки, первую ступень торможения накладывают после отключения двигателя по истечении времени, равного полупериоду колебаний подъемного сосуда (для двухконцевых подъемных установок - сосуда на короткой ветви), с тормозным моментом, равным двигательному, затем тормозной момент увеличивают парными ступенями, при этом добавки тормозного момента каждой ступени в пределах одной пары равны между собой, а время между ними равно полупериоду колебаний сосуда.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 325213, кл. В 66D 5/18, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ дискретного управления предохранительным торможением | 1986 |
|
SU1447745A1 |
| Способ предохранительного торможения шахтного подъемника и устройство для его осуществления | 1978 |
|
SU763229A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1757981A1 |
| Способ управления рабочим торможением шахтной подъемной машины | 1980 |
|
SU931637A1 |
| Устройство для управления наклонной шахтной подъемной установкой | 1981 |
|
SU971770A1 |
| СПОСОБ ЗАЩИТЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ ОТ НАБЕГАНИЯ ГРУЖЕНЫХ ПОДЪЕМНЫХ СОСУДОВ НА ТЯГОВЫЕ КАНАТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЗАЩИТА Н.Г.ОГНЕВА) | 1994 |
|
RU2104243C1 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU1009994A1 |
| Способ предохранительного торможения подъемной машины | 1983 |
|
SU1346552A1 |
| Способ торможения подъемной машины | 1982 |
|
SU1054284A2 |
| Устройство для управления предохранительным торможением подъемной установки | 1975 |
|
SU753761A1 |
