Изобретение относится к шахтным подъемам и, в частности, к способам управления их торможением.
Известен способ торможения подъемных машин, при котором последовательно с выдержкой по времени сначала включают первую и вторую ступени тормозного момента, причем вторую ступень тормозного момента, равную по величине первой ступени, включают с интервалом времени равным полупериоду собственных продольных колебаний каната, а затем при определенной минимальной скорости подъемной машины отключают вторую ступень тормозного момента до полной остановки подъемной машины, при котором вновь включают вторую ступень.
Известен также способ управления рабочим торможением шахтных подъёмных машин, согласно которому торможение про,- изводят в несколько ступеней путем изменения тормозного момента в соответствии с
заданной программой, причем на первой ступени тормозной момент увеличивают до величины, соответствующей условиям набегания подъемного сосуда на канат, на второй ступени оставляют его постоянным и равным его максимальному значению на первой ступени до останова подъемной машины, а на третьей ступени увеличивают без ограничения скорости его нарастания до максимального значения, соответствующего стопорению подъемной машины.
Известен также способ управления тормозом шахтной подъемной машины, при котором преобразуют непрерывный сигнал управления в пропорциональный ему тормозной момент.
Наиболее близким к изобретению является способ управления тормозом, при котором торможение производят в соответствии с заданной программой, а диапазон тормозного момента разделяют на ряд одинаковых ступеней и для исключения
сл
XI
о сл
скачкообразного изменения динамических нагрузок формируют дополнительный аналоговый управляющий сигнал, который подают на один исполнительный элемент одновременно с дискретным включением ряда исполнительных элементов, на которые подают дискретный управляющий сигнал, причем выбирают постоянные пороги срабатывания дискретно включаемых исполнительных элементов и определяют ко- личество последних по соотношению между уровнем сигнала заданной программы и постоянными порогами срабатывания, а величину дополнительного аналогового управляющего сигнала определяют по раз- ности между уровнем сигнала заданной программы и сигналом, пропорциональным максимальному порогу срабатывания включенных в данный момент дискретно управляемых элементов.
Недостатком способа является низкая точность работы, поскольку он не учитывает реальных характеристик тормозных устройств, имеющих .неоднозначные нелинейные характеристики типа гистерезис, обусловленные наличием сил трения и люфтов в приводном цилиндре и шарнирах устройства. Это приводит к тому, что одному и тому же значению управляющего сигнала соответствуют различные значения тормоз- ных моментов в зависимости от направления выхода на значение управляющего сигнала (в сторону увеличения или уменьшения). Наличие такой неоднозначной характеристики снижает также безопасность работы тормоза, поскольку, управляя известными способами, при определенных условиях могут возникнуть автоколебания в системе управления тормозом.
Цель изобретения - повышение точно- сти управления тормозом.
Поставленная . цель достигается тем, что управляют тормозом путем формирования и подачи на тормоз сигналов управления, величине которых соответствуют одинаковые по величине тормозные моменты, причем управляющие сигналы подают с постоянным, меньшим постоянной времени тормоза, с амплитудами, соответствующими максимальному тормозному моменту, и со скважностью, пропорциональной необходимому тормозному моменту, т.е. величине заданного тормозного момента Ма будет соответствовать следующее выражение:
MB (T-tpj)/T3 -MTmax,
где Т tsj + tpj - постоянный период следования управляющих сигналов, с;
tsj - длительность j-oro управляющего сигнала с амплитудой, соответствующей
максимальному тормозному моменту
Мттахс, С,
tpj - длительность паузы j-oro управляющего сигнала, с.
Длительность периода следования Т определяется инерционностью механической системы тормоза. Поэтому, для исключения вибраций, частота следования управляющих сигналов должна превышать собственную частоту механической системы тормоза в несколько раз, например, в 5 раз. Верхний предел частоты следования сигналов управления ограничивается потерями мощности управляющего сигнала за счет искажения в реактивных элементах управления системы, например, емкостях и индуктивностях.
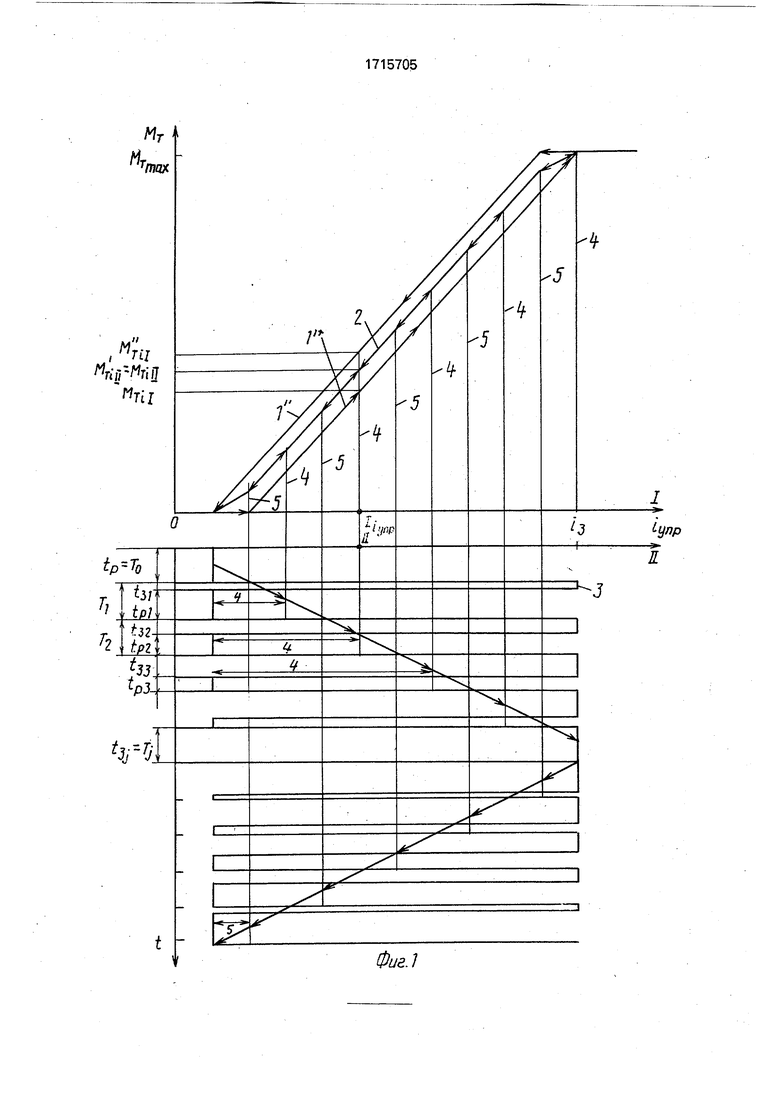
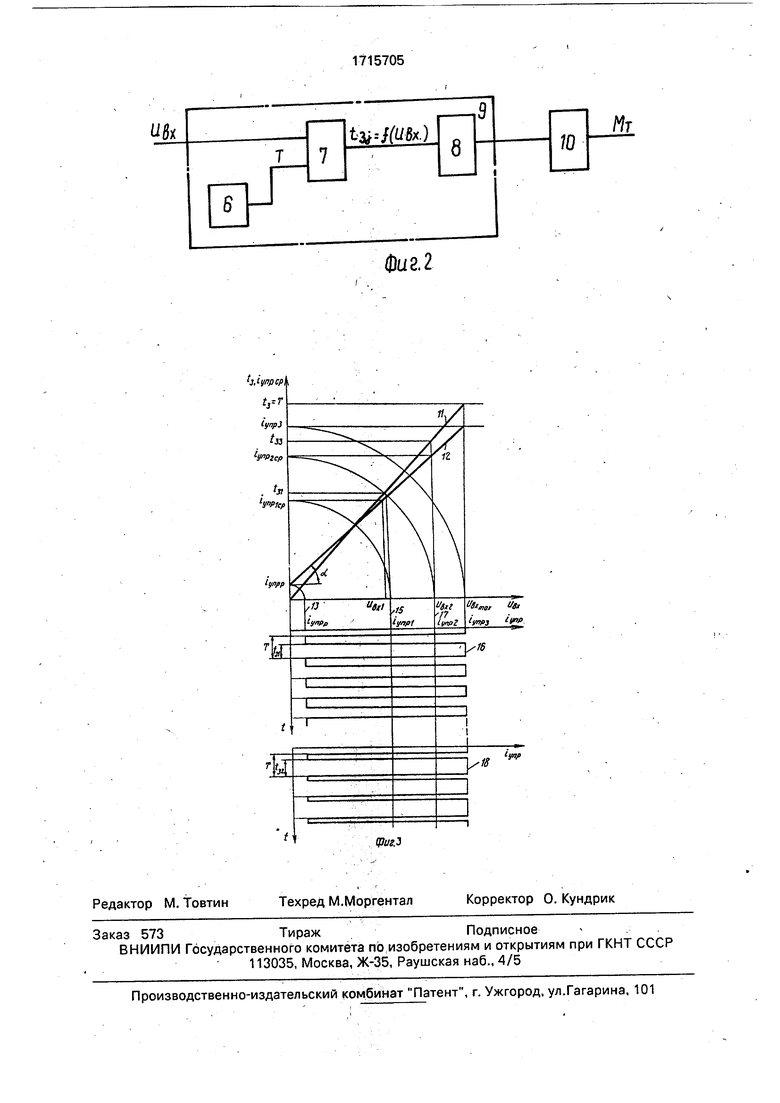
На фиг.1 приведены диаграммы,,поясняющие работу способа управления тормозом при трапецеидально изменяющемся во времени управляющем сигнале; на фиг.2 - пример реализации способа в устройстве; на фиг.З - диаграммы, поясняющие работу устройства (фиг.2) для двух значений управляющих сигналов и влияние их величин на скважность управляющих сигналов и влияние их величин на скважность управляющих тормозом сигналрв.
На фиг. обозначены: 1 - диаграмма изменения тормозного усилия (статическая характеристика торморзного устройства) при плавном изменении управляющего сигнала от 1уПр min до 1упр тахс (Т) и обратно от lynpmaxc до lynpmin (1); 2 - диаграмма изменения тормозного усилия при управлении по предлагаемому способу; 3 - диаграмма изменения управляющего сигнала lynp, формирующегося при трапецеидально изменяющемся во времени уровне входого задания; 4 - среднее значение управляющего сигнала lynpcp за j-ый период следования управляющих сигналов при увеличении во времени входного задания; 5 - то же, при уменьшении во времени входного задания.
На фиг.2 обозначены: 6 - генератор тактовых импульсов периода Т; 7 - преобразователь амплитуда - длительность импульса; 8 - выходной усилитель мощности; 9 - устройство преобразователя реализующего предлагаемый способ; 10 - тормоз.
На фиг.З обозначены: 11 - зависимость тормоз ного момента от входного сигнала Мт f(UBx); 12 - зависимость среднего значения управляющего сигнала от входного сигнала lynpcp f(UBx); 13,14 - значения тока, соответственно при расторможенном lynpp и заторможенном упрз со- стоянии подъемной машины; 15 - значение тока 1Упр1 UBxi arctg a где а. - угол наклона 12 к оси DBX; 16 - осциллограмма
тока lynpi, подаваемого в катушку управления тормозом; 17-значениетока 1упр2 ивх1 . -arctg а ; 18 - осциллограмма тока 1упр2, подаваемого в катушку управления тормозом.
Приведенные на фиг.1 диаграммы иллюстрируют способ. Диаграмма 1, представляющая собой статическую характеристику тормоза, состоит из двух частей: 1 - диаграммы изменения тормозного момента при нарастании управляющего сигнала 1упр и 1 - диаграммы изменения тормозного момента при снижении управляющего сигнала lynp. Эта диаграмма пока- зывает, что при известных способах управления точность управления определяется областью 1. Диаграмма 2 представляет собой статическую характеристику тормоза при управлении по предлагаемому способу. Эта диаграмма представляет собой усред- ненную диаграмму от V и 1, и получается она при формировании и подаче на тормоз управляющего сигнала в виде одинаковых тормозных моментов с постоянным периодом, величина которого меньше собствен- ной постоянной времени тормоза, а амплитуды соответствуют максимальному тормозному моменту. Скважность управляющих сигналов пропорциональна необходимому тормозному моменту. Диаграмма 3 иллюстрирует формирование управляющего сигнала iynp для трапецеидально изменяющегося во времени уровня тормозного момента. При этом формируются импульсы постоянного периода Т с соответственно за- данию изменяющейся скважностью. Поскольку между задающим сигналом и скважностью имеется однозначная линейная зависимость, то такая же зависимость будет иметь место и между скважностью импульсов iynp и средним значением тока управления. Поэтому среднее значение тока управления упр ср (поз.4 и 5) и тормозного момента Мт за период также будет изменяться пропорционально задающему сигна- лу. Но, так как в течение периода выходной сигнал изменяется от 0 до Мттахс и снова до О, то из-за инерционности тормозной системы истинное значение тормозного момента Мт будет иметь среднее значение (диаграм- ма 2) между характеристиками 1 и 1.
Изобретение может быть осуществлено вутройстве, приведенном на фиг.2. Генератор тактовых импульсов 6 формирует им- пульсы периода Т, которые поступают на тактовый вход блока преобразователя амплитуда - длительность импульса 7. На его управляющий вход подается сигнал задания UBX. Выход блока 6 подключен к входу усилителя мощности 8 с выхода которого, являющегося выходом преобразователя 9 формируется управляющий сигнал упр и подается в катушку управления тормозом 10.
Для иллюстрации работы способа в устройстве предлагается пример, приведенный на фиг.З для значений UBxi и UBx2.
Определенному значению Uexi будет соответствовать пропорциональная ему скважность импульсов тока управления lynpl в пределах периода Т. Каждому из них будет соответствовать среднее за период Т значение тока управления. Если этот ток подать в катушку управления тормозом, то пропорционально ему будет создаваться тормозной момент МТ|. Для того, чтобы команды противоположного значения (растормозить и затормозить) не вызывали динамических перегрузок, исключали нежелательные вибрации и позволяли надёжно и плавно управлять тормозом во всем диапазоне усилий, период следования их Т должен быть в несколько раз (например, в 5 раз) меньше постоянной времени тормозной системы.
Таким образом, если перенести величину среднего значения тока управления 1уПр за период Т на ось 1У фиг.1, то получим на оси Мт (|у) соответствующее значение тормозного усилия, величина которого определяется средним значением характеристик 1 и 1, т.е. на характеристике 2.
Формула изобретения Способ дискретного управления тормозом шахтной подъемной машины, заключающийся в формировании и подаче на тормоз сигналов управления, величины которых соответствуют одинаковым по величине тормозным моментам, отличающийся тем, что, с целью повышения точности, управляющие сигналы подают с постоянным периодом, меньшим постоянной времени тормоза, с амплитудами, соответствующими максимальному тормозному моменту, и со скважностью, пропорциональной необходимому тормозному моменту.
Ь
max
м
, птц
MTirft u il
t h
Фиг.1
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления натяжением длинномерного диэлектрического материала при его перемотке | 1990 |
|
SU1744026A1 |
| Способ управления резонансным инвертором | 1986 |
|
SU1385209A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ТОРМОЖЕНИЕМ ШАХТНОЙ ПОДЪЕМНОЙ МАШИНЫ | 1992 |
|
RU2041152C1 |
| Способ дискретного управления предохранительным торможением | 1986 |
|
SU1447745A1 |
| Устройство для измерения ускорений и времени срабатывания тормоза | 1976 |
|
SU584257A1 |
| Способ управления рабочим торможением шахтной подъемной машины | 1980 |
|
SU931637A1 |
| Гидравлический многоэлементный дисковый тормоз | 1976 |
|
SU654812A1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД ШВЕЙНОЙ МАШИНЫ | 1992 |
|
RU2006169C1 |
| СПОСОБ УПРАВЛЕНИЯ АНТИБЛОКИРОВОЧНОЙ И ПРОТИВОБУКСОВОЧНОЙ СИСТЕМОЙ (АБС/ПБС) ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2324611C2 |
| Способ предохранительного торможения подъемной машины | 1983 |
|
SU1346552A1 |
Изобретение относится к шахтному подъему, в частности к способам управления их торможением. Цель изобретения - повышение точности управления. Сущность способа заключается в формировании и подаче на тормоз сигналов управления, величине которых соответствуют одинаковые по величине тормозные моменты. При этом управляющие сигналы подают с постоянным периодом, меньшим постоянной времени тормоза, с амплитудами, соответствующими максимальному тормозному моменту, и со скважностью, пропорциональной необходимому тормозному моменту. 3 ил.
tj.tirwcpi
Редактор М, Товтин
Техред М.Моргентал
Заказ 573ТиражПодписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул.Гагарина, 101
фиг.э
Корректор О. Кундрик
| Способ управления торможением шахтной подъемной установж | 1976 |
|
SU611845A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
