1
Изобретение относится к механизации процесса доставки грузов, преимущественно при стесненных условиях работы транспортных средств, например, на строительных площадках, где требуется обеспечить экономное сопряжение горизонтальных и вертикальных трасс движения.
Известен передвижной подъемник с применением механизма в виде нюрнберских ножниц 1.
Однако этот подъемник имеет большие габариты в сложенном состоянии.
Наиболее близким техническим рещением является подъемно-транспортная установка, содержащая перемещающуюся по основным вертикальным направляющим грузонесущую платформу с ходовыми роликами, параллелограммный прижимной механизм, верхний шарнир которого соединен со средней частью шарнирно прикрепленных к платформе перекрещивающихся рычагов, свободные концы которых соединены с нижним шарниром, а на боковых шарнирах смонтированы клиновые ведущие колеса с индивидуальными приводами {2.
Недостатком данной установки является ограниченность области применения, допускающая выполнение единственной операции - вертикальное перемещение грузов.
Целью изобретения является расширение
функциональных возможностей установки путем обеспечения ее перемещения в горизонтальном направлении.
Это достигается тем, что установка снабжена горизонтальными направляющими, примыкающими к основным вертикальным направляющим, и дополнительными вертикальными направляющими, контактирующими с ходовыми роликами, а к нижнему шарниру параллелограммного механнзма шарнирно нрикреплены перекрещивающиеся рычаги, несущие на свободных концах дополнительные клиновые ведущие колеса с индивидуальными нриводами, причем из горизонтальных направляющих- верхняя и примыкающая к ней основная вертикальная направляющая выполнены с криволинейными участками, обеспечивающими плавную стыковку ведущих колес грузонесущей платформы с направляющими.
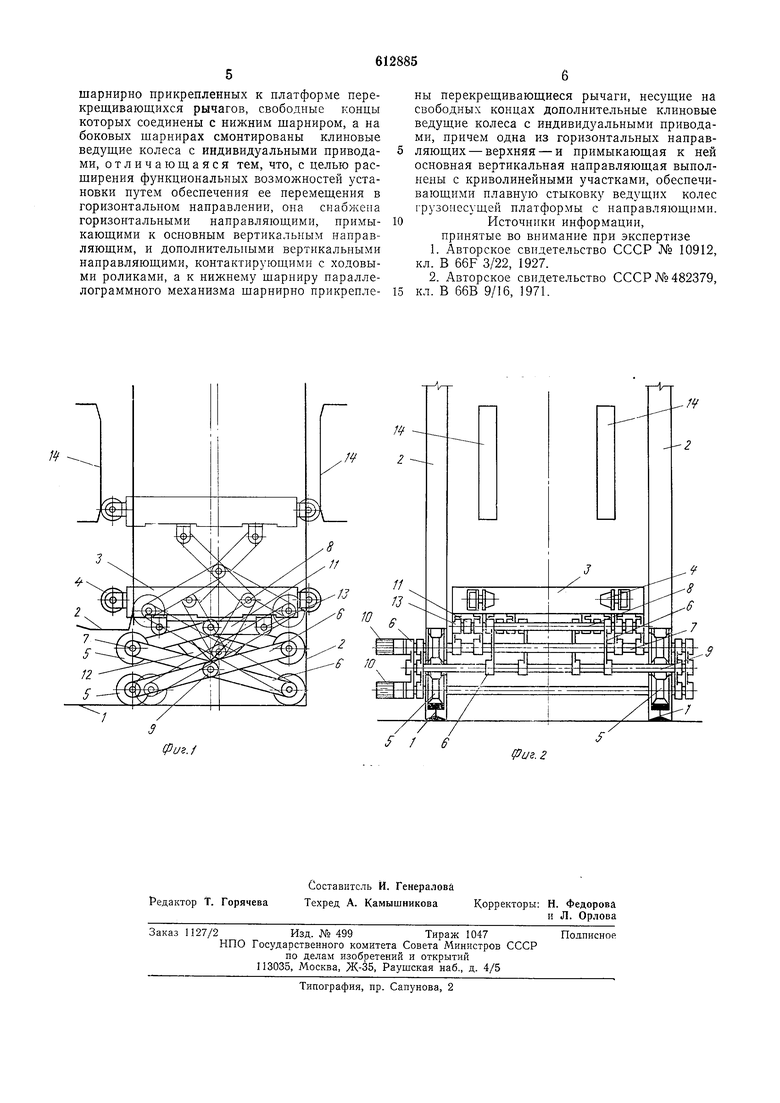
На фиг. 1 изображена предлагаемая установка; на фиг. 2 - то же, вид сбоку.
Подъемно-транспортная установка состоит из перемещаемой по горизонтальным 1 и вертикальным 2 направляющим грузонесущей платформы 3 с ходовыми роликами 4 и ведущих колес 5, смонтированных на параллелограммном прижимном механизме.
Прижимной механизм выполнен в виде сочетания щарнирно-рычажной системы и шарнирных звеньев 6, образующих систему вертикально расположенных параллелограммов, нижние звенья которых перекрещиваются. Параллелограммы по боковым 7, верхним 8 и нижним 9 шарнирам, а также по свободным концам перекрещивающихся звеньев объединены горизонтальными осями. Оси, объединяющие параллелограмм по шарнирам 7 н концам перекрещивающихся звеньев параллелограммов, выполняют функции пригодных валов и на каждой из них попарно посажены клиновые ведущие колеса 5, снабженные инднвидуальными нрнводами 10, содержащими реверсивный электродвигатель и самотормозящийся редуктор, например червячный. Корпус привода фиксируется, например, посредством фланца на нижних шарнирных звеньях параллелограммов. На верхние шарниры 8 через шарнирные соединения опираются перекрещивающиеся рычаги 11, которые одними концами соединены с тягами 12 и через них с нижними шарнирами 9 системы параллелограммов, а другими через подвижные шарннры 13 - с полом грузонесущей платформы 3. Горизонтальные направляющие 1 выполнены в виде рельсовой колеи, а вертикальные - в виде двух параллельных ветвей рельсовой колеи, установленных друг против друга на расстоянии, допускающем расположение между пими механизма перемещения при гарантированном нрижатии ведущих колес 5. Горизонтальные и вертикальные нанравляющие совмещены в нлане, имеют одинаковую ширину колеи и взаимно установлены так, что одна вертикальная колея примыкает к концу горизонтальной колеи, а другая содержит в нижней части кривой переходной участок и отстоит от горизонтальной колеи на расстоянии, допускающем плавную стыковку ведущих колес и вертикальных направляющих 2. В начале вертикальных направляющих внутри каждой нз колеи на уровие ходовых роликов 4 грузоиесущей нлатформы 3 при ее расиоложении на уже сжатом в продольном направлении, но еще опирающемся на горизонтальные направляющие 2 параллелограмма установлены дополнительные вертикальные направляющие 14, взаимодействующие с ходовыми роликами 4. Габарит нлатформы по ширине меньше ширины колеи направляющих. Установка работает следующим образом. Горизонтальное перемещение нлатформы обеспечивается под действием силы тяги взаимодействующих с горизонтальной колеей и вращающихся в одну и ту же сторону нижних ведущих колес. При этом параллелограмм прижимного механизма сжат по высоте до предела, обусловленного его кинематическими возможностями. После подхода платформы под вертикальные направляющие 2 и прижатия опережающих пар нижних и верхних ведущих колес 5 к замыкающей горизонтальные направляющие 1 вертикальной колее осуществляют ежатие параллелограмма в продольном направлении под действием силы тяги продолжающей движение отстающей пары нижних ведущих колес 5. Этим обеспечивают поднятие грузонесущей платформы 3 и опирание ее через ходовые ролики 4 на дополнительные вертикальные направляющие 14, а также поднятие верхних ведущих колес и введение нх в зацепление с вертикальными и направляющими 2. Стыковка верхних ведущих колес с вертикальными направляющими 2 производится при наличии в зонах соприкасания прижимного усилия, возникающего под действием веса грузонесущей платформы 3 и располагаемого на ней груза. Под действием указанного веса поворачиваются относительно щарнира 8 рычаги II, увлекая вверх связанные с ними щарнирно тяги 12, что обуславливает вертикальное перемещение шарнира 9, соединенного с тягами 12, в направлении шарнира 8. При этом система шарнирных параллелограммов сжимается по вертикали при горизонтальном перемещении боковых шарниров 7 в сторону вертикальных направляющих 2, чем обеспечивается прижатие к ним ведущих колес 5. После стыковки верхних ведущих колес с вертикальными направляющими 2 и установки их в распор между колеями противостоящие пары включают на вращение в противоположных направлениях, чем создают силу тяги и- обеспечивают подъем тягового устройства по вертикальным направляющим вначале только за счет верхних ведущих колес, а затем и за счет нижних ведущих колес после их отрыва от горизонтальных направляющих 1, переключения противостоящих пар на вращение в противоположных направлениях и заводки в вертикальные направляющие. Устойчивость тягового устройства в вертикальных направляющих в период движения только за счет верхних ведущих колес обеспечивают взаимодействием ходовых роликов 4 с дополнительными направляющими 14. Далее ходовые ролики 4 выводят из зацепления с направляющими 14, а направленность движения обеспечивают за счет разнесенных по высоте тягового устройства ведущих колес 5. Опускание платформы производится в обратном норядке. Удержание платформы 3 на вертикальных нанравляющих 2 при отключении приводов 10 осуществляют за счет самотормозящихся редукторов. Изменение направления движения тягового устройства достигают реверсированием электродвигателей приводов тяговых осей. Формула изобретения Подъемно-транспортная установка, содержащая перемещающуюся по основным вертикальным направляющим грузонесущую платформу с ходовыми роликами, параллелограммный прижимной механизм, верхний шарнир которого соединен со средней частью
шарнирно прикрепленных к платформе перекрещивающихся рычагов, свободные концы которых соединены с нижним щарниром, а на боковых шарнирах смонтированы клиновые ведущие колеса с индивидуальными приводами, отличающаяся тем, что, с целью расщирения функциональных возможностей установки путем обеспечения ее перемещения в горизонтальном направлении, она снабжена горизонтальными направляющими, примыкающими к основным вертикальным направляющим, и дополнительными вертикальными направляющими, контактирующими с ходовыми роликами, а к нижнему шарниру параллелограммного механизма шарнирно прикреплены перекрещивающиеся рычаги, несущие на свободных концах дополнительные клиновые ведущие колеса с индивидуальными приводами, причем одна из горизонтальных направляющих - верхняя - и примыкающая к ней основная вертикальная направляющая выполнены с криволинейными участками, обеснечивающими нлавную стыковку ведущнх колес грузомесущей платформы с направляющими.
Источиики информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 10912, кл. В 66F 3/22, 1927.
2.Авторское свидетельство СССР №482379, кл. В 66В 9/16, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемно-транспортная система | 1978 |
|
SU775034A1 |
| Бесканатная подъемная установка | 1971 |
|
SU482379A1 |
| Бесканатная подъемная установка | 1976 |
|
SU608743A1 |
| Бесканатный подъемник | 1987 |
|
SU1446080A1 |
| Подъемно-транспортная система | 1986 |
|
SU1418246A1 |
| Система бесканатного подъема | 1984 |
|
SU1169923A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ЛЕСТНИЧНЫМ МАРШАМ | 2009 |
|
RU2388444C1 |
| Параллелограмный подъемник | 1985 |
|
SU1641768A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| Устройство для транспортированияРулОНА КОНВЕйЕРНОй лЕНТы | 1979 |
|
SU823234A1 |
/ ff
