(54) ПОДЪЕМНОиТРАНСПОРТНАЯ СИСТЕМА

| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемно-транспортная установка | 1976 |
|
SU612885A1 |
| Подъемно-транспортная система | 1986 |
|
SU1418246A1 |
| Подъемно-транспортная система | 1988 |
|
SU1562275A1 |
| Подъемно-транспортная система | 1987 |
|
SU1446079A1 |
| Бесканатный подъемник | 1987 |
|
SU1446080A1 |
| Вертикальный конвейер для штучных грузов | 1985 |
|
SU1244046A1 |
| Бесканатная подъемная установка | 1971 |
|
SU482379A1 |
| ЦИФРОВОЕ СВЕТОЧУВСТВИТЕЛЬНОЕ ОБОРУДОВАНИЕ ДЛЯ ВЕРСТКИ СТЕРЕОСКОПИЧЕСКИХ ПРОЕКЦИОННЫХ ИЗОБРАЖЕНИЙ И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2009 |
|
RU2489748C2 |
| Подвеска грузонесущего конвейера | 1978 |
|
SU839891A1 |
| РУЧНАЯ ХОЗЯЙСТВЕННАЯ ТЕЛЕЖКА | 2005 |
|
RU2282549C1 |
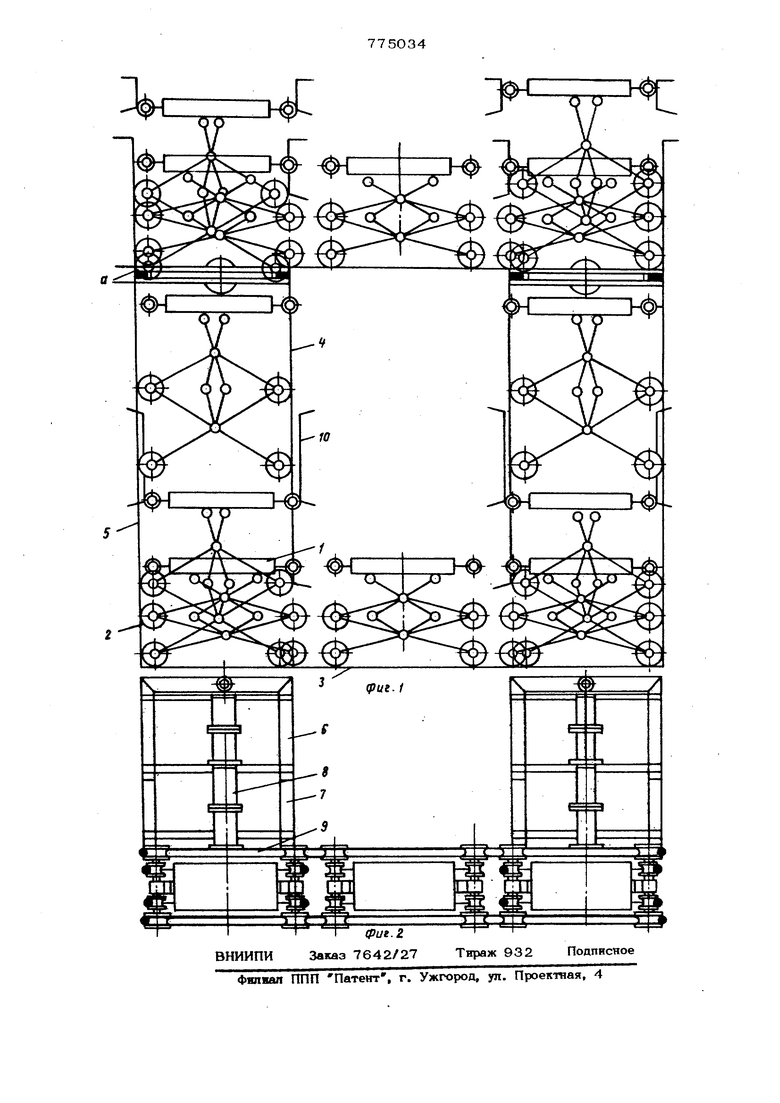
Изобретение относится к механйзашга процесса доставки грузов, преимущественно при стесненных условиях работы транспортных средств, например, на строитель ных площадках и в складских пом пениях, где требуется обеспечить эконок ное сопряжение гортэонтальных и вертикальных трасс движения. Известна подъ лно-травсаортная устанс ка, содержащая перемещающуюся Ш) /вертикальным направляющим кабину с ходовыми роликами и механизм подъема с параллелограммным прижимным устройством, верхний шарнир которого сое/шнен со средней частью шарнирно прикрепленных к кабине перекршцивающихся рычагов, свободные концы которых при пслмощи тяг соединены с нижним шарнирся т, а В а боковых шарнирах смонтированы клином вые ведущие колеса с индивидуальными привадами fl J. Недостатком данной установки ягвляет ся ограниченность области применения, допускающая выполнение единственной операции - вертикальное пер ьтешение грузов. Наиболее близким техническим решением является подъемно-транспортная система, содержащая грузонесущую tmaT форму, перемещакицуюся посредством а&тон« дного привода 1Ю осшжным горизонтальным и примыкакяпим к ним вертикальным направляющим, одни из которых в нижней части выполнены с криволинейными участками и установлены с зазором по вертикали относительно горизонталь ных направляющих, и дополнительные вертикальные направляющие 1.2. Недостатками этой системы явлаются ограниченные производительность и площадь зоны обсттуживания. недостаток обусловлен периодичностью действия установки, второй - тем, что перемещение груза в го{И13рнтальном направлении возможно по трассе, расположенной на одном уровне. Целью изобретения является повышевие я расширение площади обслуживаемой зоны путем обеспечения мобильного движения ряда грузонесущих платформ по вертикальным и расположенным на разных уровнях горизонтальным трассам ,при оперативных переходах с трассы на трассу. Это достигается тем, что основные горизонтальные направляющие установлены поэтажно, по их концам с двух сторон смонтированы основные вертикальные направляющие, расположенные с зазорами, в каждом из которых смонтирована перекрьюающая площадка, состоящеш из неподвижной опорной рамы, устанавливаемой перпендикулярно основным горизонтальным направляющим. Выдвижная часть плошадки содержит ползун с дополнительными горизонтальными направляющими, стыкуемыми с внешними вертикальными и основными горизонтальными направляющими. Привод плошадки содержит силовой цилиндр, шток которого шарнирно соединен с опорной рамой, а корпус неподвижно закреплен на выдвижной частя. На фиг. 1 изображена предлагаемая система, вид спереди; на фиг. 2 - то же, вид сверку. Подъемно-транспортная система состоит иЗ автономно перемещающихся по стационарно установленным основным вертикальным направпяклцим я примыкающим к ним горизонтальным направлякяиим грузонесущих платформ 1, каждая из которых оборудована ходсжыми роликами и снабжена механизмом 2 передвижения с параппепотраммно-рычажным устройством прижатия ведущих колес к опорным поверхностям. Прижимное устройство выпо№ нено в виде сочетания шарнирно-рычажно системы и шарнирных звеньев , образующих систему вертикально расположенных пй ппепогреалмоа, нижние звенья перекрешиваются. Параппепограммы по всем шарнирам а также по свободным концам перекрешиваюшихся звенья объединены горизонтальными осями. Оси, обтг единяюшие параллелограммы по бок(жым шарнирам и концам перекрещивающихся звеньев, выполняют функшга приводных вапов, на кажд(л из которых попарно посажены клиновые ведущие колеса, снабженные индивидуальными приводами. Привод содержит ретерсивный электро двигатель и самотормозящийся редуктор, например червячный. Корпус привода закреплен на одном из звень® параллелограммов. На верхние оси параллелогра мов через шарниры опираются перекрещиваю1ш еся рычаги, которые одним кон- иом соединены с тягами и через них с нижней осью параллелограммов, а другим через подвижные шарниры - с полом грузонесущей платформы. Горизонтальные направЛ5Пошие выполнены в виде рельсовой колеи, а вертикальные - в виде двух параллельных ветвей рельсовой колеи, установленных друг против друга на расстоянии, допускающем расположение между ними механизма передвижения при гарантированном прижатии ведущих колес. Горизонтальные и вертикальные направляющие совмещены в плане и имеют одинаковую ширину колеи. Основные горизонтальные направляющие 3 устансжлены поэтажно, а по конаам их с двух сторон смонтированы основные вертикальные направляющие, причем внутренние вертикальные направляющие 4 установлены относительно горизонтальных направляющих с зазором ПС вертикали, а внешние вертикальные направляющие 5, кроме монтируемых на первом этаже, - с горизонтальным зазором а , в каждом из которых смонтирована перекрывающая ляда. Перекрывающая ляда содержит неподвижную опорную раму 6 и перемещающую в ней выдвижную часть, выполненную в виде, например, ползуна 7, принудительно перемещаемого в горизонтальной плоскости перпендикулярно направляющим 3 посредством привода 8. Ползун 7 оборудован дополнительными горизонтальными направляклцими 9, которые при закрытой ляде примыкают к внешним вертикальным направлякяцим 5 и стыкуются с основными горизонтальными направляющими 3. Привоя 8 выдвижной части ляды выполнен в виде, например, силсвого цилиндра, шток которого шарнирно прикреплен к опорной раме 6, а поршень - неподвижно закреплен на ползуне 7. Внутренние вертикальные направляющие 4 содержат в нижней частя криволинейные переходные учас-ткн, об1еспечивающне плавную стыковку ведущих колес с направляющими 4 и 5. На каждом этажа зоны обслуживания в начале основных вертикальных направляющих установлены дополнительные вертикальные направляющие 1О, взаимодействующие с ходовыми роликами грузонесущих платфо; 1. Габарит платформ 1 по ширине меньгше колеи направляющих. Принплп действия подъемно-транспортнгЛ Системы следующий. Горизонтальное перемещение самоходных платформ 1 обеспечивают под действием силы т-яги нижних ведущих колес, взаимодействующих с горизонтальной колеей. При этом параплелограммы прижимного устройства сжаты по высо.те до предела, обусловленного кинематическими возможностями механизма 2 передвижения. После подхода платформы под вертикальные направляющие 4 и прижатия опережающих пар ведущих колес к направляющим 5 осуществляют сжатие параллелограммов в продольном направлении под действием силы тяги отстающей пары нижних ведущих колес, продолжающих движение. обеспечивают поднятия грузонесущей плат формы 1 и опирание ее через ходовые ролики на дополнительные направляющие Ю, а также поднятие верхних веххущих колеЬ и введение их в зацепление с основными вертикальными направляющими 4 и 5. Стыковку верхних ведущих колес с вертикальными направляющими 4 и 5 производят при наличии в зонах соприкасания прижимного усилии, возникающего под действием веса грузонесущей платформы 1 и расположенного на ней груза. Под действием указанногчэ веса поворачи- ваются относительно верхней оси параллелограммов перекрещивакициеся рычаги. Они увлекают вверх связанные с- ними шарнирно тяги, чтчэ обуславливает вертикальное перемещение соединенной с тягами нижней оси параллелограммов в ту же сторону. При этом система шарнирных параллелограммов сжимается по вертикали при горизонтальном перемещении боковых осей в сторону вертикальных направляющих 4 и 5, чем и обеспечивается прижатие ведущих кодес. Выбор потребного усилия прижатия ведущих колес и вер тякальным направляющим осушестеляется автсллатически в зависимости от преодолеваемого сопротивления движению. Применение ведущих колес клинового профиля позволяет реализовать повышенные знач ВИЯ силы тяги, необходимые как при cть ковке самоходных пла-гформ с вертикаль- ными направляющими, так и. при подьа е платформ по вертикальным направляющим. После стыковки верхних ведущих колес с вертикальными направляющими 4 и 5 и установки их враспор между колеями противостоящие пары колес включают на встречное вращение. Так создают силу тягк и обеспечивают подъем платформы вначале только за счет верхних ведущих колес, а затем и с участием нижних в&дущигс колес после их отрыва от горизонтальных направляющих, переключения на встречное враЫение и заводки в вертикаль ные направляющие. Устойчивость самотсолНОЙ платформы в период движения, осуществляемого только засчет верхних ведущих копес, обеспечивают взьямодействи- ем ходовых роликов с дополнительными вертикальными направляющими 10. Далее ходовые ролики выходят из зацепления, а устойчивость платформы и направленность ее движения обеспечивают посредством всех пар ведущих колес, разнесенных по высоте механизма 2 передвижения. При подходе платформы к вышерасположенному этажу открывают при помощи привода 8 перекрьшающую выход ляду путем горизонтального перемещения ползуна 7 в перпендикулярном направляющей 3 направлении. Этим удаляют с трассы движения дополнительные горизонтальные направляющие 9, перекрьюающие выход на этаж. Выходящая на этаже платформа уде| живается от опрокидывания при помощи нижних ведущих колес, взаимодействующих с основными вертикальными направляющими нижнего этажа, верхних ведущих колес, взаимодействующих с основными вертикальными направляющими верхнего этажа, и ходовых роликов, контактирующих с дополнительными вертикальными направляющими верхнего этажа. Вертикальное движение платформы может быть продолжено в направлении следующего этажа без перехода на горизонтальную трассу достигнутого этажа. В случае необход мости перехода на достигнутый этаж вертикальное движение платформы продолжают до положения, при котором она приподнимается над перекрывакяпей лядой. Теперь устойчивость платфоряулы в вертикальных направлякщих обеспечивается уже только за счет опирания ходовых роликов, верхних ведущих колес и одной пары нижних ведущих колес, расположенной со стороны внешних вертикальных направлякшшх. После того, как платформа приподнята над ляяой, последнюю закрывают путем установки ползуна в положение, при котором смонтированные на к&л дополнительные горизонтальные направляющие 9 примыкают к внешним вертикальным направлякхпим 5 и стыкуются с основЕЮй горизонтальной направляющей 3 этажа. Затем платформу onycKaibT. на дополнительные го|жзонтал1гные направляющие 9 и посредством складывания параллелограммов прижимного устройства по высоте, обеспечиваемого при верхних ведущих колес, производят расстыковку механизма 2 передвижения с вертикальными направляющими 4 и 5. В таком положении платформа готсюа.для движения по горизонтальным направпшошикг лостягнутого этажа. В конце трассы этого этажа платформу устанавливают на перекрывающую пяду, закрытую к моменту подхода ппатфор мы, причем в случае необходимости движения вверх на следующий этаж повторяют операции, аналогичные выполняемым на ннжнерасположенном этаже. Еспн надо осуществить Мшиженве на нижний этаж, то платфо( вначале приподнимают над лядой, как это было сделано при выходе на этаж, а затем после открывания лата платформа уходит вниз. Опускание платформы осушбствлтот в обратном порядке. Как видно из устройства и прнж шта дейс-гаия подъемно-транс1юртной сис темы, схемы движения самоходных платформ в пределах зоны обслуживания могут быть caMiiiMH различными - маятниковая, тупик жая, с замкнутым циклом движения и т. п. Компенсация гвом&гркческих несовершенств вертикальных на провлякщих, а также взноса их в ведущи колес осушествляется автоматически под действие внешней нагрузки путсял горизонтального перйлешенвя ведущих колес при взаимном изменении штложения всех yiapHHpHO св аяных элементе првжпмнсипо устройства. Ударжавие шатформы на вертикальных направлякицюс при .аварийном или запланированном отктачейни приводов осуществпяетса за счет сшл .торможения редукторов, а также спепиаль ными средствами торможения. Додьз нотранспортная система может работать в автоматическом или при дистанционном управлении. Применение изобретения по оляет осзгшествить оперативное обслуживание плоской многоэтажкой зоны путем мо6ил1 Н01Ч движения целого ряда самоходных грузонесуших платформ. Формула изобретения 1. Подь но-транспортная система, одержащая груа1несущую платформу, пер алещаюшуюся посредством автономного привода по основным горизонтальным и примыкающим к ним вертикальным направляющим, одни из которых в нижней части ыполнены с криволинейными участками и установлены с зазором по вертикал№ относительно горизонтальных направляющих, в дополнительные вертикальные направля ющие, отличающаяся тем, что, с целью расширения зоны обслуживания, Основные горизонтальные направляющие усташ влены поэтажно, по их концам с двух сторон смонтирсюаны основные вертикальные направляющие, расположенные с зазорами, в каждом из которых смонтирована перекрывающая плсмцадка, состоящая из неподвижной опорной рамы, устанавливаемой перпендикулярно основным горизонтальным направляющим. 2.Светила по п. 1, о т л и ч а ю щ д я с я тем, что выдвижная часть площадки содержит ползун с дополнительными горизонтальными направляющими, стыку лыми. с внешними вертикальными в основными горизонтальными направляк щими. 3.Система 1юп. 1, отличающая с я тем, что привод площадки содержит силовс цилиндр, шток которого шарнирно соединен с рамой, а корпус неподвижно закреплен на выдвижной части. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 482379, кл. В 66 В 9/02, 1971. 2.Авторское свидетельство СССР № 612885, кл. В 66 В 9/О2, 1976.
