Изобретение относится к подъемно-транспортным устройствам и может быть использовано преимущественно на глубоких шахтах угольной промышленности в условиях взрывоопасной среды, а также на глубоких шахтах горнодобывающей промышленности.
Целью изобретения является снижение энергозатрат за счет использования потенциальной энергии опускаемых подъемных сосудов, а также уменьшение габаритов.
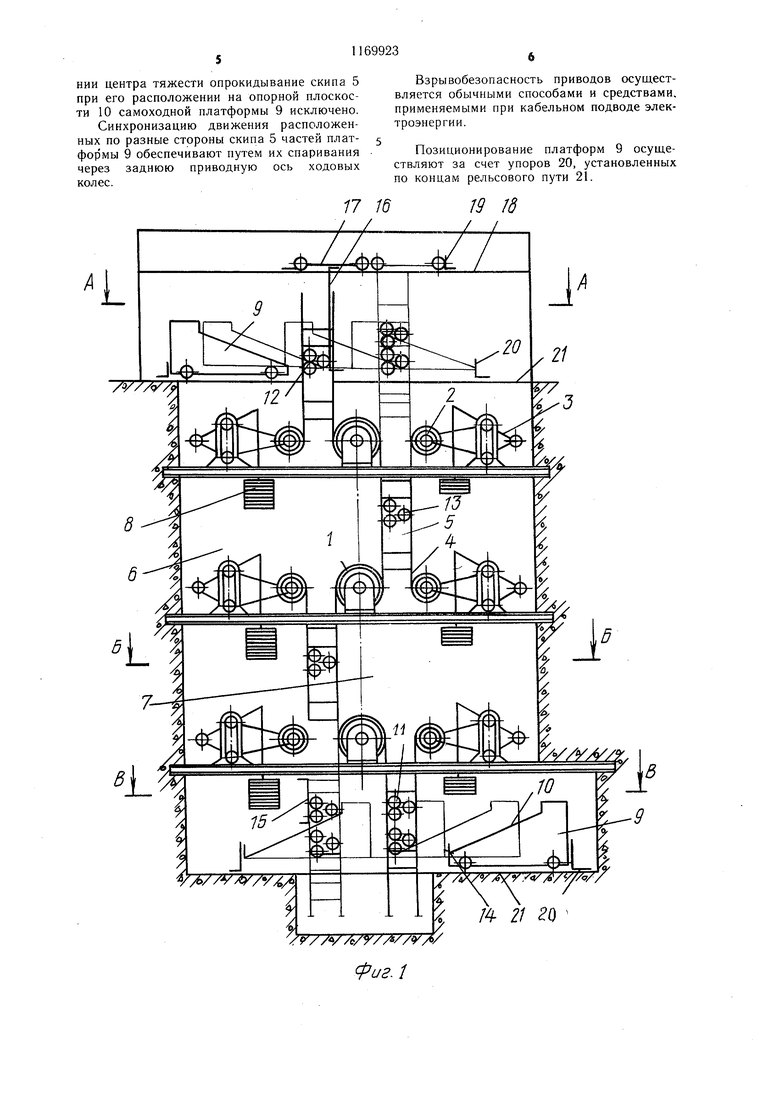
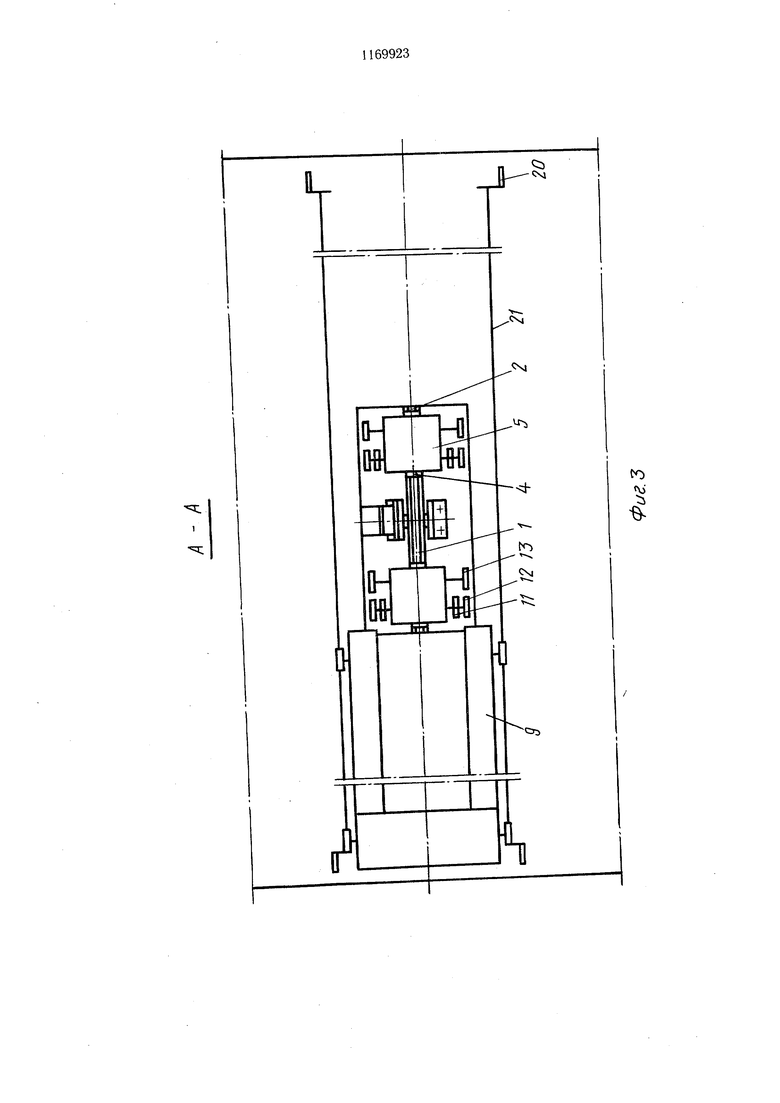
На фиг. 1 изображена предлагаемая система бесканатного подъема, фасад; на фиг. 2 - то же, вид сбоку; на фиг. 3 - сечение А-А на фиг. 1 (план верхней приемной плошадки); на фиг. 4 - сечение Б-Б на фиг. 1 (план приводной станции); на фиг. 5 - сечение В-В на фиг. 1 (план нижней приемной площадки).
Система подъема содержит приводные станции, стационарно установленные по всей длине вертикального ствола с интервалом относительно друг друга и поворотные станции, монтируемые на верхней и нижней приемных площадках.
Каждая приводная станция содержит ведущий ролик 1 и два прижимных ролика 2, каждый из которых снабжен параллелограммным прижимным устройством 3. Меж.ду роликами 1-2 расположены тяговые брусья 4, неподвижно закрепленные на противоположных сторонах скипов 5. Прижимные ролики 2 каждой приводной станции смонтированы на одном из боковых шарниров параллелограмма каждого из двух прижимных устройств 3 и установлены по обе стороны от ведущего ролика 1 с возможностью горизонтального перемещения под действием груза 8. Груз 8 прикреплен к одному из концов рычага, представляющего собой продолжение верхнего звена параллелограмма, отстоящего от прижимного ролика 2 и пересекающего верхний шарнир. Верхний шарнир и нижний шарнир параллелограмма установлены в опоре с возможностью вертикального перемещения, например вдоль выполненного в опоре паза. Скипы 5 расположены в стволе двумя параллельными рядами, образующими два раздела ствола - грузовой 6 и порожняковый 7.
Приводные станции установлены по стволу с интервалом равным или меньшим длины тягового бруса 4. Между роликами 1-2 каждой приводной станции одновременно расположены тяговые брусья 4 двух скипов 5 - груженого и порожнего, смещенных относительно друг друга по высоте на длину тягового бруса 4.
Верхняя поворотная станция установлена со стороны грузового раздела 5 ствола, нижняя - со стороны порожнякового раздела 7 с возможностью перемещения между разделами.
Каждая поворотная станция выполнена в виде самоходной колесно-рельсовой платформы 9, состоящей из двух частей, располагающихся по обе стороны скипа, разделенных в передней части платформы 9., объединенных в одно целое задней ведущей
осью ходовых колес и оборудованных сверху плоскостью 10, имеющей уклон в сторону противоположного раздела ствола. Эта плоскость 10 контактирует с опорными роликами, смонтированными в верхней части скипа 5 со стороны, противоположной тяговым брусьям 4, двумя наклонными рядами. Ролики установлены в вершинах треугольника. Верхний ряд опорных роликов il отстоит от скипа 5 на большее расстояние, чем нижний ряд 12, и контактирует с нак.юнной п.; оскостью 10 платформы 9 верхней f;;воротной станции, а нижний ряд роликов с наклонной плоскостью 10 платформы 9 нижней поворотной станции.
Поворотные станции снабжены упорами, нижняя - контактирующими с крайними опорными роликами П13 скипа 5
упорами, один из которых 4 установлен в нижней части наклонной плоскости 10 самоходной платформы 9. другой упор 15 смонтирован стационарно с внеи1ней стороны
начала грузового раздела 6 ствола, а верхняя поворотная станция - одним контактирующим со скипом 5 упоро.м 16, установленным на самоходной тележке 17, перемещающейся между грузовым 6 и юрожняковым 7 раздела.ми стгюла по подносному рельсовому
пути 18 между ограничительными упора.ми 19.
Воздействующий па прижимное устройство 3 специальный 8 выполнен наборным из отдельных плит с возможностью изменения его веса.
Ведущие ролики 1 приводных станций, а
также 11ривод11))е колеса самоходных платформ 9 и тележки 17 оборудованы самотормoзянJ,ими приводами, например, с червячным редуктором.
Принцип работы системы подъема заключается в следуюп ем.
Движение скипов 5 по стволу обеспечивают приводные станции, а поворотные станции осуществляют изменение направления их движения путем перестановки скипов
из грузового раз.дела 6 в порожняковый 7 и наоборот. В целом скипы 5 движутся в стволе по замкнутому циклу.
Вертикальное движение скипов 5 реализуют за счет силы тяги, возникающей в зонах соприкосновения ведущих роликов 1 с тяговыми брусьями 4 при наличии прижимающего их усилия со стороны роликов 2 под действием груза 8 путем изменения конфигурации щарнирно-рычажной системы па раллелограммного устройства 3, создающего горизонтальное перемещение роликов 2 в направлении брусьев 4 и ролика 1.
Значения усилия зависят от геометрических параметров шарнирно-рычажной системы прижимного устройства 3 и веса груза 8, который можно регулировать в зависимости от требуемых значений тяговых усилий, в частности неодинаковых на порожняковой 7 и грузовой 6 ветвях расссматриваемой системы подъема.
Для уравновешивания собственного веса встречно движущихся скипов 5 (с тяговыми брусьями 4, опорными роликами 11 -13) приводные станции располагают по стволу так, чтобы между роликами 1-2 каждой станции одновременно находятся тяговые брусья 4 двух скипов - порожнего, движущегося вниз и груженого, движущегося вверх. При этом на общем для обеих скипов ведущем ролике 1 уравновещиваются моменты от действия веса противоположных скипов 5, включая их собственный вес, а также вес прикрепленных к ним брусьев 4 и роликов 11 -13.
Таким образом, энергия приводных станций расходуется только на подъем горной массы.
Удерживание скипов 5 в вертикальном положении осуществляется через щтанги 4 за счет приводных станций, а на поворотных станциях - дополнительно посредством упоров 14-16.
Операции по перестановке скипов из грузового раздела 6 ствола в порожняковый 7 и наоборот осуществляется также с использованием сил гравитации, причем происходит это следующим образом.
Порожний скип 5, перемещаясь по стволу вниз, подходит к последней перед зумпфом приводной станции, проходит ее и останавливается в положении, когда он еще удерживается на весу роликами 1-2 за концы брусьев 4. В этот момент под него подходит самоходная платформа 9 нижней поворотной станции и останавливается тогда, когда нижний ряд роликов скипа 5 обопрется на ее опорную поверхность 10. атем платформу 12 отводят назад в положение, при котором скип 5 под действием собственного веса, опускаясь вниз, освобождает свои брусья 4 и 3 зацепления с роликами 1-2 приводной станции и останавливается перед упором 14, упираясь в него крайними роликами 12. Вслед за этим платформу 9 вместе с установленным на ней скипом 5 подают в направлении грузового раздела ствола 6.до упора 15, а затем при дальнейщем движении платформы 9 в том же направлении осуществляют поднятие скипа 5 в сторону приводной станции вплоть до полной заводки брусьев 4 в зацепление с роликами 1-2 на грузовом разделе 6 ствола. Затем скип 5 начинает движение вверх.
При установке платформы 9 под скип 5 на порожняковом разделе 7 упор 14 беспрепятственно проходит мимо скипа, так
как в этот момент на его пути нет роликов 12 Они находятся выще.
Загрузку скипа 5 горной массой осуществляют, например, в момент установки его под упор 15.
Груженый скип 5 подходит к последней перед устьем ствола приводной станции и останавливается в момент, когда еще находится в зацеплении концы его брусьев 4, а скип 5 удерживается от опрокидывания упором 16. В это время под опорные ролики 11 скипа 5 подводят платформу 9 верхней поворотной станции и путем ее перемещения в направлении порожнякового раздела 7 ствола поднимают скип 5 вверх, выводя его брусья 4 из зацепления с роликами 1-2. После этого платформу 9 совместно с опрокидывающимся на ее наклонную поверхность 10 через ролики 11 скипом 5 и удерживающим скип от опрокидывания упором 16 перемещают дальше в направлении порожнякового раздела 7 ствола и устанавливают в положении, при котором возможна заводка брусьев 4 между роликами 1-2 порожняковой ветки 7 подъема.
Затем платформу 9 отводят назад в направлении грузового раздела 6 ствола. При этом под действием собственного веса скип спускается вниз, заводя брусья 4 между роликами 1-2. После зацепления брусьев 4 с роликами 1-2 скип начинает движение вниз.
Разгрузка скипа осуществляется, например, в момент его выхода из зацепления с роликами 1-2 верхней приводной станции.
Для того, чтобы иметь время на операции по перестановке скипов 5 из одного раздела ствола в другой при непрерывном их движении, груженые и порожние скипы 5 смещены относительно друг друга по высоте на длину тягового бруса 4.
Самоторможением приводов самоходных платф,орм 9 и тележки 17 обеспечивают их жесткое стопорение, необходимо для четкого позиционирования скипов 5 при выполнении операции по перестановке их из одного раздела ствола в другой. Кроме этого, позиционирование скипов 5 обеспечивает при помощи упоров 14-16 поворотных станций, а также упоров 14, строго ограничивающих расстояние движениятележки 19 между грузовым 6 и порожняковым 7 разделом ствола.
Самоторможением ведущих роликов 1 обеспечивают удержание скипов на весу в аварийных ситуациях, например при отключении электроэиергии, а также при запланированных остановках в период ремонта и ревизии.
. Вертикальную устойчивость скипа 5 в период перестановки из одного раздела ствола в другой обеспечивают не только за счет упоров 14-15, но и тем, что центр тяжести скипа 5 расположен значительно ниже опорных роликов 11 -13. При таком расположеНИИ центра тяжести опрокидывание скипа 5 при его расположении на опорной плоскости 10 самоходной платформы 9 исключено. Синхронизацию движения расположенных по разные стороны скипа 5 частей платформы 9 обеспечивают путем их спаривания через заднюю приводную ось ходовых колес.
Взрывобезопасность приводов осуществляется обычными способами и средствами, применяемыми при кабельном подводе электроэнергии.
Позиционирование платформ 9 осуществляют за счет упоров 20, установленных по концам рельсового пути 21.
иг. /
1
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТРАНСПОРТИРОВАНИЯ ГОРНОЙ МАССЫ ИЗ КАРЬЕРОВ И ШАХТ (ВАРИАНТЫ) | 1997 |
|
RU2136883C1 |
| Пневмоподъемник | 1990 |
|
SU1801915A1 |
| ПОДЗЕМНАЯ НЕФТЕДОБЫЧА НАКЛОННЫМИ СТВОЛАМИ НА БОЛЬШИХ ГЛУБИНАХ | 2021 |
|
RU2773391C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГОРНЫХ ПОРОД В КАРЬЕРЕ | 1995 |
|
RU2116450C1 |
| ЛИНИЯ ФОРМОВАНИЯ, СУШКИ И САДКИ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ | 1993 |
|
RU2087309C1 |
| Устройство для механизированной откатки вагонеток | 1979 |
|
SU868063A1 |
| Скиповый подъемник | 1983 |
|
SU1126524A1 |
| ТЕХНОЛОГИЧЕСКАЯ СХЕМА ВЫЕМОЧНОГО УЧАСТКА ПОДЗЕМНОЙ БЕЗОПАСНОЙ РАЗРАБОТКИ ВЫСОКОГАЗОНОСНОГО ПЛАСТА | 2018 |
|
RU2735072C2 |
| КОНВЕЙЕРНАЯ ОТКАТКА | 2016 |
|
RU2627918C2 |
| Штабелеукладчик для штучных грузов | 1983 |
|
SU1144956A1 |


СИСТЕМА БЕСКАНАТНОГО ПОДЪЕМА, включающая установленные по всей высоте подъема с интервалом равным длине тяговых брусьев подъемных сосудов прнводные станции, имеющие ведущие ролики и размещенные на параллелограммных механизмах прижимные ролики, установленные двумя параллельными рядами по высоте подъема в грузовом и порожняковом отделениях скиповые подъемные сосуды, тяговые брусья которых установлены с возможностью перемещения между ведущим и прижимным роликами, и поворотные станции, установленные на приемных площадках, отличающаяся тем, что, с целью снижения энергозатрат за счет использования потенциальной энергии опускаемых подъемных сосудов, a также уменьшения габаритов, каждая приводная станция имеет один ведущий ролик, установленный с возможностью одновременного взаимодействия с тяговыми брусьями скиповых подъемных сосудов обоих рядов, подъемные сосуды в рядах смещены относительно друг друга по вертикали на длину тягового бруса, поворотные станции выполнены в виде наклонных колесных платформ и упороь для подъемных сосудов, последние снабжены размещенными в верхних частях их боковых поверхностей опорными роликами, установленными в вершинах треугольника, причем верхний ролик установлен с возможностью взаимодействия с наклонной платформой верхней приемной площадки, нижний - с наклонной платфор(Л мой нижней приемной площадки, a средний - с обоими платформами, при этом один из упоров жестко закреплен на нижней приемной площадке с внешней стороны грузового отделения, a другой установлен над верхней приемной площадкой с возможностью горизонтального перемещения и стопорения у внешней стороны порожнякового О5 отделения. со со ю оо
20
| Бесканатная подъемная установка | 1971 |
|
SU482379A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Молчанов А | |||
| А., Помазан О | |||
| К | |||
| Роботсистема для подъема полезного ископаемого с больших глубин | |||
| Уголь Украины, 1981, № 6, с | |||
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
