го в горизонтальном направлении от привода 7 клина 8 с фигурными пазами и пальцев 9 с роликами 10, расположенными в пазах клина, а другой захватный рычаг 4 выполнен с отверстиями, взаимодействующими с пальцами 9.
Работает захватное устройство следующим образом.
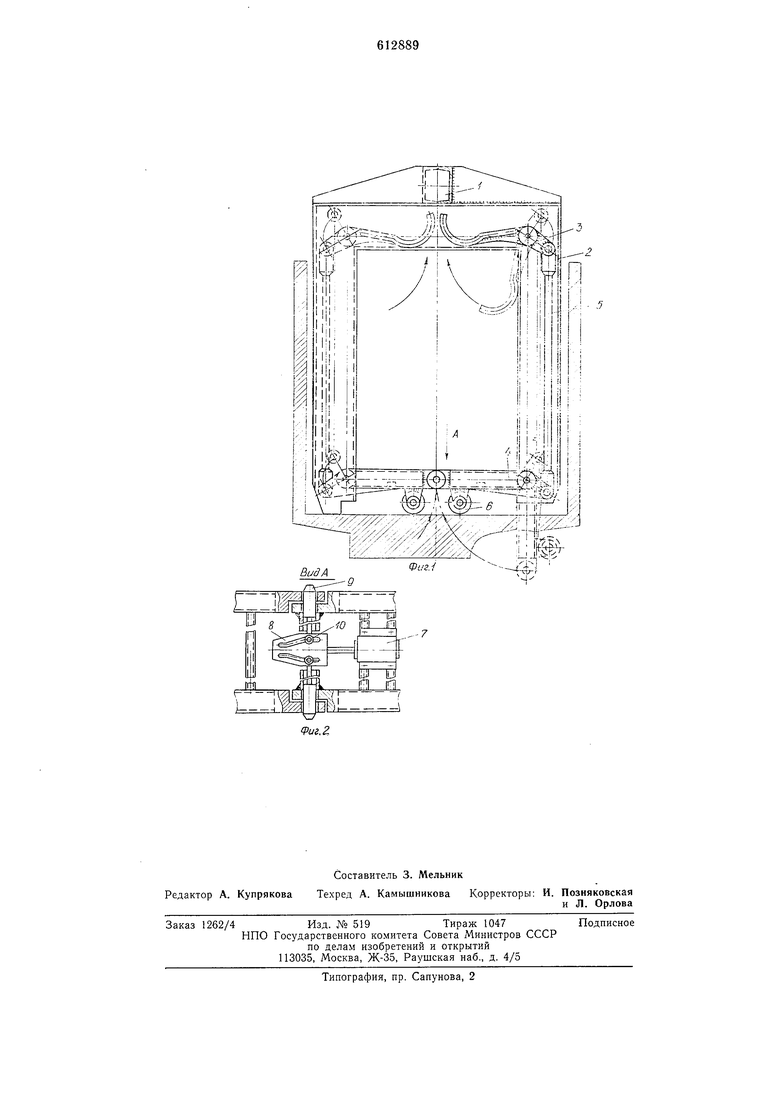
Грузоподъемный механизм поднимает захватное устройство с расфиксированными захватными рычагами 4 над объектом, например пакетом древесины, и опускает его так, что объект попадает между П-образными рамами 1. Захватное устройство свободно опускается до упора рычага 4 в объект. При дальнейшем опускании П-образной рамы 1 рычаг 3 начннает поворачиваться вокруг своей оси, и через тягу 5 начинают поворачиваться выполняющие -роль челюстей захватные рычаги 4, пока они не сойдутся в одной горизонтальной плоскости. Включают привод 7, который, толкая шток вперед, заставляет пальцы 9 через тяги и ролики 10 в пазах соединить через отверстия концы захватных рычагов 4. Вся рама с грузом становится единой закольцованной жесткой конструкцией.
Роль привода рычагов выполняет в данном случае вес самого захвата и ноднимаемый объект. Рычаги 3, упираясь в груз, через тяги 5 поворачивают рычаги 4, которые затем запираются специальным замком - производится захват и подъем груза.
После этого кран поднимает захватное устройство, переносит его с грузом над вагоном и опускает между стенками вагона до упора в дно вагона роликовыми опорами 6 и конца.ми П-образных рам. После этого включают привод 7, и он через фигурные (клиновые) пазы, ролики 10 и тяги выдергивает пальцы 9 из отверстий захватных рычагов 4, разъединяя
их. Замок открывается, и П-образная рама 1 выводится через верх, освобождая груз. Захватные рычаги 4, поднимаясь, под действием веса объекта раскрываются все щнре, пока не повиснут вертикально, коснувщись роликовыми опорами 6 бортов вагона. Груз остается в вагоне, а устройство поднимается и подается вновь на захват объекта.
Формула изобретения
1.Захватное устройство для штучных грузов, содержащее П-образную раму с вертикальными полыми стойками, внутри которых расположены захватные органы и механизм их замыкания в рабочем положении, отличающееся тем, что, с целью упрощения конструкции, каждый захватный орган состоит из двуплечего рычага, щарнирно закрепленного в верхней части стойки, и двуплечего захватного рычага, щарнирно закрепленного в нижней части стойки, причем одни плечи рычагов связаны между собой жесткой тягой, а другое плечо каждого захватного рычага снабжено роликовой опорой.
2.Устройство по п. 1, отличающееся тем, что механизм замыкания захватных органов в рабочем положении содержит установленный на одном из захватных рычагов, подвижный в горизонтальном направлении от привода клин с фигурными пазами и пальцы роликами, расположенными в пазах клина и взаимодействующими с отверстиями, выполненными в другом захватном рычаге.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР Л 358247, кл. В 66С 3/12, 1969.
2.Авторское свидетельство СССР №436783, кл. В 66С 1/32, 1972.
. ШШ.
- X. - -x-J- -V- .й-Х /Г li.- -.-I
./7. ./:/v...- A,.::r-::rJWt --r 3 n.i I
.r-jt- ) i
L JHmuii:
и
V
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для опрокидывания вагонов | 1990 |
|
SU1791311A1 |
| Захватное устройство для грузов, снабженных штырем с фигурной головкой | 1973 |
|
SU542709A1 |
| Стенд для ремонта рам тележек грузовых вагонов | 1985 |
|
SU1328230A1 |
| Захватный рабочий орган "Фобус-88" для сыпучих грузов | 1987 |
|
SU1516436A1 |
| Захват для кабин | 1984 |
|
SU1221176A1 |
| Крановый захват | 1973 |
|
SU537019A1 |
| Захватное устройство для облицовочных плит | 1976 |
|
SU600068A1 |
| Захватное устройство для грузов | 1978 |
|
SU821382A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Захватное устройство | 1987 |
|
SU1493582A1 |