1
Изобретение относится к подъемно-транспортному оборудованию, а именно к захватным устройствам для грузов.
Известно захватное устройство для грузов, содержащее присоединяемую к грузоподъемному механизму раму, с которой посредством переходных элементов связаны изогнутые подхватные лапы 1.
Недостатком данного устройства является то, что захват и освобождение- грузов осуществляется вручную.
Цель изобретения - автоматизация процесса захвата и освобождения грузов.
Указанная цель достигается тем, что каждая подхватная лапа снабжена механизмом фиксации ее положения, а переходные элементы выполнены в виде стоек с пазами в нижних частях, на концах которых щарнирно закреплены подхватные лапы, центральная часть каждой из подхватных лап оборудована шарнирной тягой, свободный конец которой снабжен обкатными роликами, установленными с возможностью перемещения в упо.мянутом пазу, при этом механизм фиксации положения подхватных лап содержит щарнирный подпружиненный крюк с пальцами, расположенный в пазу стойки, и щарнирно подпружиненную защелку связанную посредством гибкой связи с тягой.
Кроме того, с целью расщирения диапазона типоразмеров захватываемых грузов, рама выполнена раздвижной.
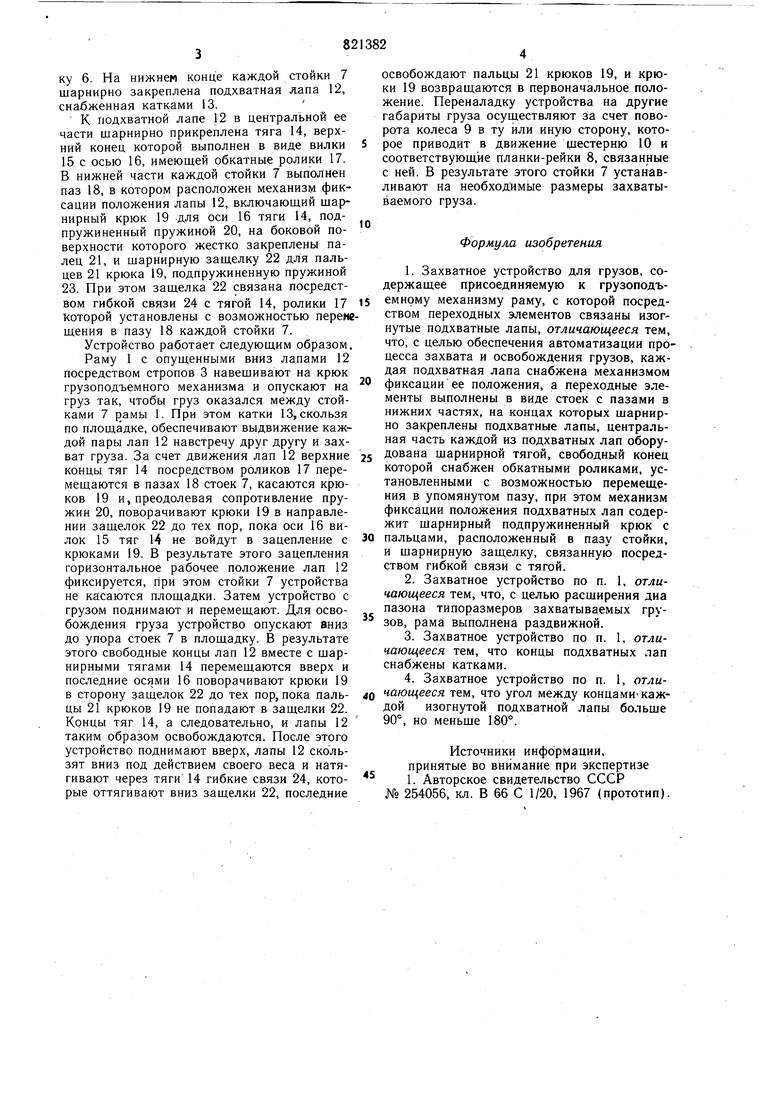
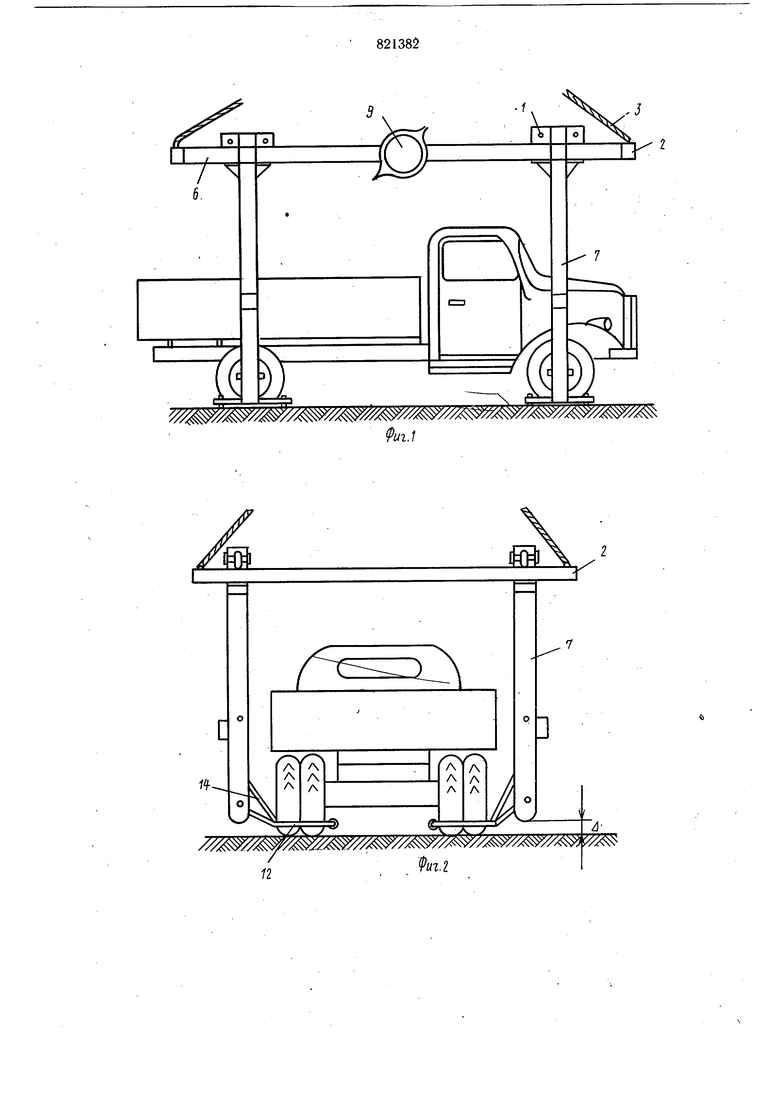
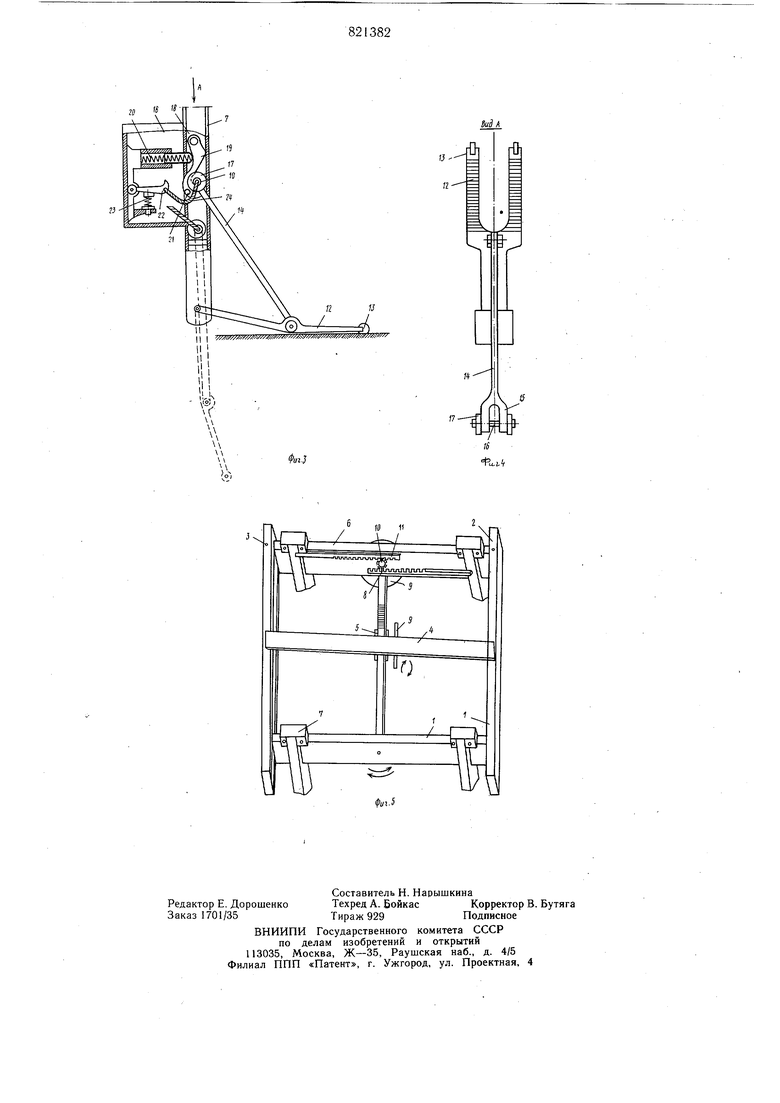
Концы подхватных лап снабжены катками. При этом угол между концами каждой изогнутой подхватной лапы больще 90°, но меньше 180°На фиг. 1 показано захватное устройство для грузов, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - стойка с подхватной лапой и механизмом фиксации ее положения; на фиг. 4 - вид А на фиг. 3; на фиг. 5 - рама в сборе.
Устройство содержит раздвижную раму 1, включающую две полые балки 2,имеющие стропы 3 и скрепленные связывающей балкой 4, в центре которой расположены скобы 5. Между полыми балками 2 установлены переме1цающиеся относительно друг друга две скользящие балки 6. На балках установлены стойки 7, на которых закреплены планкирейки 8, перемещающиеся относительно друг друга посредством колеса-указателя 9 габаритов груза, имеющего щестерню 10, насаженную на вал 11, проходящий через балку 6. На нижнем конце каждой стойки 7 шарнирно закреплена подхватная лапа 12, снабженная катками 13. К подхватной лапе 12 в центральной ее части шарнирно прикреплена тяга 14, верхний конец которой выполнен в виде вилки 15 с осью 16, имеющей обкатные ролики 17. В нижней части каждой стойки 7 выполнен паз 18, в котором расположен механизм фиксации положения лапы 12, включающий щарнирный крюк 19 для оси 16 тяги 14, подпружиненный пружиной 20, на боковой поверхности которого жестко закреплены палец 21, и щарнирную защелку 22 для пальцев 21 крюка 19, подпружиненную пружиной 23. При этом защелка 22 связана посредством гибкой связи 24 с тягой 14, ролики 17 которой установлены с возможностью переме щения в пазу 18 каждой стойки 7. Устройство работает следующим образом. Раму 1 с опущенными вниз лапами 12 посредством стропов 3 навещивают на крюк грузоподъемного механизма и опускают на груз так, чтобы груз оказался между стойками 7 рамы 1. При этом катки 13, скользя по площадке, обеспечивают выдвижение каждой пары лап 12 навстречу друг другу и захват груза. За счет движения лап 12 верхние концы тяг 14 посредством роликов 17 перемещаются в пазах 18 стоек 7, касаются крюков 19 и, преодолевая сопротивление пружин 20, поворачивают крюки 19 в направлении защелок 22 до тех пор, пока оси 16 вилок 15 тяг 14 не войдут в зацепление с крюками 19. В результате этого зацепления горизонтальное рабочее положение лап 12 фиксируется, при этом стойки 7 устройства не касаются площадки. Затем устройство с грузом поднимают и перемещают. Для освобождения груза устройство опускают вниз до упора стоек 7 в площадку. В результате этого свободные концы лап 12 вместе с щарнирными тягами 14 перемещаются вверх и последние осями 16 поворачивают крюки 19 в сторону защелок 22 до тех пор, пока пальцы 21 крюков 19 не попадают в защелки 22. Концы тяг 14, а следовательно, и лапы 12 таким образом освобождаются. После этого устройство поднимают вверх, лапы 12 скользят вниз под действием своего веса и натягивают через тяги 14 гибкие связи 24, которые оттягивают вниз защелки 22, последние освобождают пальцы 21 крюков 19, и крюки 19 возвращаются в первоначальное положение. Переналадку устройства на другие габариты груза осуществляют за счет поворота колеса 9 в ту или иную сторону, которое приводит в движение щестерню 10 и соответствующие планки-рейки 8, связанные с ней. В результате этого стойки 7 устанавливают на необходимые размеры захватываемого груза. Формула изобретения 1.Захватное устройство для грузов, содержащее присоединяемую к грузоподъемному механизму раму, с которой посредством переходных элементов связаны иаогнутые подхватные лапы, отличающееся тем, что, с целью обеспечения автоматизации процесса захвата и освобождения грузов, каждая подхватная лапа снабжена механизмом фиксации ее положения, а переходные элементы выполнены в виде стоек с пазами в нижних частях, на концах которых шарнирно закреплены подхватные лапы, центральная часть каждой из подхватных лап оборудована шарнирной тягой, свободный конец которой снабжен обкатными роликами, установленными с возможностью перемещения в упомянутом пазу, при этом механизм фиксации положения подхватных лап содержит щарнирный подпружиненный крюк с пальцами, расположенный в пазу стойки, и щарнирную защелку, связанную посредством гибкой связи с тягой. 2.Захватное устройство по п. I, отличающееся тем, что, с целью расширения дна пазона типоразмеров захватываемых грузов, рама выполнена раздвижной. 3.Захватное устройство по п. 1, отличающееся тем, что концы подхватных лап снабжены катками. 4.Захватное устройство по п. I, отличающееся тем, что угол между концами-каждой изогнутой подхватной лапы больше 90°, но меньще 180°. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 254056, кл. В 66 С 1/20, 1967 (прототип).
3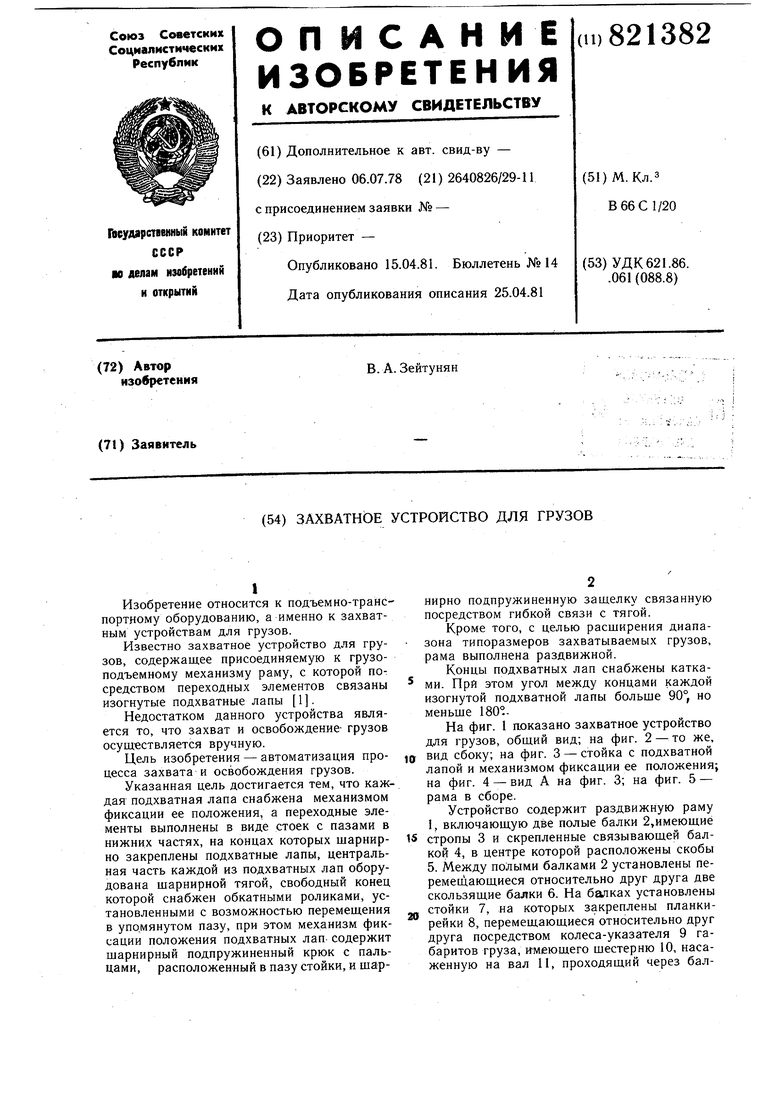
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Автоматический захват | 1971 |
|
SU537020A1 |
| Захватное устройство для контейнеров | 1980 |
|
SU1018898A1 |
| Грузозахватное устройство | 1976 |
|
SU763233A1 |
| ПОДЪЕМНИК ДЛЯ АВТОМОБИЛЕЙ | 1973 |
|
SU368184A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Захватное устройство для облицовочных плит | 1976 |
|
SU600068A1 |
| Грузозахватное устройство длягРузОВ C НЕСущиМ пОяСОМ | 1977 |
|
SU821383A1 |
| Захватно-разделительное устройство | 1981 |
|
SU1000373A1 |
| Грузозахватное устройство | 1982 |
|
SU1066931A1 |
n
Г2.
V V
grjT
Фиг.
И
J--- ll
U рд Клддллпп KU
W И
-Ч
