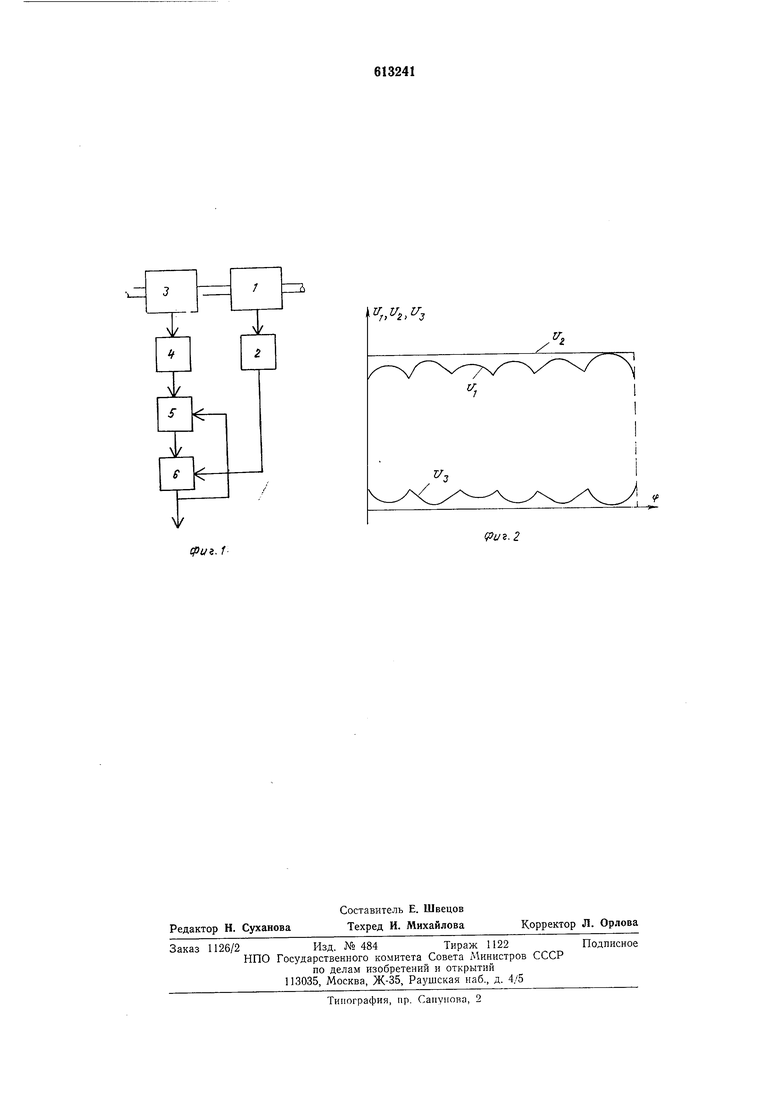
измерения угловой скорости и выходной сигнал функционального нреобразователя; ф - угол поворота вала тахогенератора. Характер сигналов на фиг. 2 соответствует случаю использования трехфазного тахогенератора переменного тока и шестифазной схемы выпрямления.
Устройство содержит тахогенератор 1 переменного тока, соединенный выходом с выпрямителем 2, и последовательно соединенные датчик 3 углового положения, функциональный преобразователь 4, перемножитель 5 и сумматор 6. Выпрямитель 2 соединен выходом с вторым входом сумматора 6, а выход сумматора 6 соединен с вторым входом перемножителя 5.
Функциональный преобразователь 4 лредпазначен для воспроизведения нелинейной функции угла поворота тахогенератора, дополняющей его пульсирующий сигнал при некоторой угловой скорости до неизменного значения. Задание нелинейной функции наиболее просто может быть осуществлено при совмещении в одном элементе функций нелинейного преобразователя 4 и датчика 3 положения, например, путем установки на одном валу с тахогеператором вращающегося потенциометра с нелинейной характеристикой, либо при использовании фотодатчика с установленной на одном валу с тахогенератором непрозрачной маской, контур которой сформирован в соответствии с заданной нелинейной функцией угла поворота тахогенератора.
Расчеты показывают, что устройство малокритично к погрешностям используемого в нем аналогового перемножителя, что позволяет применять наиболее простые схемы перемножения.
Устройство работает следующим образом.
Сигнал переменного тока с тахогенератора 1, пройдя через выпрямитель 2, поступает на вход сумматора 6, где суммируется с компенсирующим сигналом 1/4, формирующимся на выходе перемножителя 5. При полной компенсации фазных и оборотных пульсаций на выходе сумматора 6 появляется сигнал, пропорциональный угловой скорости тахогеператора и не содержащий указанных пульсационных составляющих, присущих исходному сигналу на выходе выпрямителя. В некоторый момент времени t в условиях полной компенсации сигнал на выходе сумматора 6 определяется суммой
U,(i) U,(f)+U,(t)K-(t), (1)
где К - коэффициент пропорциональности;
® (О - угловая скорость.
Необходимый компенсирующий сигнал l(t формируется на выходе перемножителя 5 путем перемножения выходного сигнала устройства f/2(0 и сигнала Uz(t) с выхода функционального преобразователя 4
gU,(t) U,(i).U,(t),(2)
Из выражений (1) и (2) однозначно определяется зависимость сигнала на выходе функционального преобразователя 4 lJz(t) от времени, который необхо/дим для полной компепсации пульсациоиных составляющих выходного сигнала
rj /.V 2((0 K-(t)-Ui(t) ,(t)(t)
При некоторой фиксированной угловой скорости со (О const получим
f/,(T) V
(3) rt-wo
Выражение (3) описывает характер нелинейной зависимости, воспроизводимой функциональным преобразователем 4. Конкретный вид нелинейности /з(ф) определяется особенностями используемого экземпляра тахогенератора и схемы выпрямления. Для задания
иелинейпости (ф) в соответствии с формулой (3) достаточно иметь осциллограмму выходпого сигнала выпрямителя Ui(ff, полученную за один полный оборот тахогенератора при некоторой фиксированной угловой
скорости соо.
Проведенные эксперименты подтвердили, что предлагаемое устройство позволяет осуществлять точное (пульсации на выходе устройства снижаются в 100-500 раз) и практически безынерционное измерение скорости различных механизмов.
Формула изобретения
Устройство для измерения угловой скорости, содержащее тахогенератор переменного тока, вал которого жестко связан с датчиком углового положения, а выходная обмотка подключена к выпрямителю, и сумматор, отличающееся тем, что, с целью повыщения быстродействия путем безынерционной компенсации фазных и оборотных пульсаций в выходном напряжении, оно снабжено последовательно соединенными функциональным преобразователем, подключенным к выходу датчика углового положения, перемножителем и сумматором, при этом второй вход перемножителя соединен с выходом сумматора. Источники информации,
принятые во внимание при экспертизе
1.Туп А. Я. Тахогенераторы для систем управления электроприводами. М.-Л., 1966, с. 47-52.
2.Авторское свидетельство № 454478, кл. G 01Р 3/46, 03.05.73.
r,2,,
.i
CpLIZ. 1(Риг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угловой скорости | 1981 |
|
SU1029080A2 |
| Преобразователь угловой скорости | 1984 |
|
SU1273810A1 |
| Устройство для обнаружения скольжения колесных пар подвижного состава | 1982 |
|
SU1050925A1 |
| Вентильный генератор | 1988 |
|
SU1684870A1 |
| Датчик угловой скорости | 1973 |
|
SU454478A1 |
| Электропривод | 1988 |
|
SU1529394A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Двухканальная система регулирования скорости | 1980 |
|
SU900256A1 |
| ИСТОЧНИК ВТОРИЧНОГО ЭЛЕКТРОПИТАНИЯ С КОМПЕНСАЦИЕЙ ИСКАЖЕНИЙ В ПИТАЮЩЕЙ СЕТИ | 2005 |
|
RU2292627C1 |
| Следящий электропривод | 1978 |
|
SU773884A1 |