Изобретение относится к измерительной технике и может быть исполь зовано для безынерционного измерения угловой скорости маишн и механизмов, например в быстродействующих прецизионных электроприводах постоянного и переменного тока. В известном устройстве для измерения угловой скорости для подавления оборотных и фазных пульсаций используется функциональный преобразователь, подключенный к выходу датчика углового положения. Сигналы с выхода функционального преобразов теля и выхода устройства перемножаются и полученный сигнал суммируется с выходным сигналом тахогенератора. Данное устройство содержит тахог нератор переменного тока, вал которого жестко связан с датчиком углового положения, а выходная обмотка подключена через выпрямитель к одно му из входов сумматора, второй вход которого соединен с выходом перемно жителя, а выход - с п.ервым входом перемножителя, к второму входу кото рого подключен через функциональный преобразователь выход датчика углового положения l. Недостатки этого устройства необходимость предварительного полу чения для каждого ирпользуемого экземпляра тахогенератора и выпрямите ля осциллограммы выходного сигнала выпрямителя, полученной за полный оборот ротора тахогенератора при некоторой фиксированной угловой ско рости , и необходимость реализации сложного характера нелинейной зависимости, воспроизводимой функци нальным преобразователем, Цель изобретения - увеличение то ности измерения за счет компенсации оборотных и фазных пульсаций, пропорциональных угловой скорости. Поставленная цель достигается тем, что в предлагаемом устройстве функциональный преобразователь состоит из интегратора и запоминающего устройства, причем выход выпрямителя через последовательно соединенные интегратор и запоминающее устройство подключен к второму входу перемножителя, а управляющие входы интегратора и запоминающего устройства соединены с выходом датчика углового положения. Это позволяет в каждый момент вр мени вычислять значение коэффициент учитывающего изменение чувствитель ности тахогенератора от положения ротора, путем сравнения преобразова нного сигнала с выхода выпрямител с сигналом датчика углового положения и в соответствии с этим производить более точную корректировку выходного сигнала преобразователя. На чертеже изображена схема преобразователя, общий вид. Преобразователь содержит.тахогенератор 1 переменного тока, соединенный выходом с выпрямителем 2, сумматор 3, датчик углового положения 4и последовательно соединенные интегратор 5, запоминающее устройство 6 и перемножитель -7. Вход интег- ратора 5 соединен с выходом выпрямителя 2 и первым входом сумматора 3, выход которого соединен с вторьам входом перемножителя 7, а выход датчика углового положения 4 соединен с управляющими входами интегратора 5и запоминающего устройства 6. Преобразователь работает следующим образом. Сигнал постоянного тока с тахогенератора 1, пройдя через выпрямитель 2, поступает на вход сумматора 3, где суммируется с компенсирующим сигналом,формирующимся на выходе перемножителя 7. При полной компенсации фазных и оборотных пульсаций на выходе сумматора 3 появляется сигнал, пропорциональный угловой скорости тахогенератора 1 и не содержащий указанных пульсаций составляющих, присущих исходному сигналу на выходе выпрямителя 2. . В некоторый момент времени t в условиях полной компенсации сигнал на на выходе сумматора 3 определяется суммой U{t)U,(tl rKcotil, {-fJ U3(t)rU(t)4где Ujit) - напряжение на выходе сумматора; и. it) - напряжение на выходе выпрямителя; Uj(t) - напряжение на выходе запоминающего устройства 1/U0 - коэффициент передачи перемножителя;. К - коэффициент пропорциональности j tent)- угловая скорость. Б момент прихода импульса с датчика углового положения в запоминающем устройстве 6 запоминается напряжение- U/tl-U;- . (2/ где Ug - начальное напряжение на вы ходе интегратора; Т - постоянная времени интегрирования; , ,t- -моменты прихода импульсов с датчика углового положения. На интеграторе в этот момент устанавливается начальное напряжение
Учитывая зависимость чувствии,
тельности тахогенератора от положен: ния ротора, можно записать
((ot)Ku)(t), (з;
где К (d) - коэффициент, учитывающий изменение чувствительности тахогенератора от положения ротора. Расчеты показывают, что к (с(-)в пределах угла , определяемого моментами времени -t : и t j ; , остается практически постоянным. Угол ucL определяется из вьдоажения
Кд4оС :р Kui(tMt, (4J
ii.
где Кд - коэффициент пропорадионалБ
ности. Выбирается
(Я
Из выражений (2 ), (З ;, (4 ) и (5; определяется зависимость напряжения на выходе запоминающего устройства от коэффициента к (о6)
UjtJzU l-K(ot)J (fc)
Из выражений (1 ) и (б ; определяется значение выходного сигнала
UJt) U3(, Ku;(tr(7)
Таким образом, в преобразователе производится вычисление значения К oL на каждом шаге интегрирования At, соответствующем углу поворота
0 ротора тахогенератора ЛоС, и, в соответствии с этим, коррекция выходного напряжения.
Расчеты показывают, что такое выполнение устройства при достаточ5но большом количестве меток датчика углового положения и точности их нанесения позволяет полностью скомпенсировать оборотные и фазные пульсации выходного сигнала устройства,
0 пропорционального измеряемой угловой скорости, что приводит к повыше иию точности измерения угловой скорости .
Использование преобразователя в
5 электроприводах постоянного и переменнЬго тока повысит их точность и быстродействие за счет устранения погрешностей, вызванных нестабильностью мгновенной скорости вращения, а при измерении угловой скорости ма0шин и механизмов повысится достоверность получаемой информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угловой скорости | 1984 |
|
SU1273810A1 |
| Устройство для измерения угловой скорости | 1977 |
|
SU613241A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Двухканальная система регулирования скорости | 1980 |
|
SU900256A1 |
| Способ регулирования тока нагрузки непосредственного преобразователя частоты с естественной коммутацией | 1987 |
|
SU1446681A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
| Устройство для обнаружения скольжения колесной пары транспортного средства | 1985 |
|
SU1299847A1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1700738A1 |
ПРЕОБРАЗОВАТЕЛЬ УГЛОВОЙ СКОРОСТИ по (авт. св. 613241, о т л ичающийся тем, что, с целью I увеличения точности измерения за счет компенсации оборотных и фазных пульсаций, пропорциональных угловой Скорости, функциональный преобразователь состоит из интегратора и запоминающего устройства, причем выход выпрямителя через последовательно соединенные интегратор и запоминающее устройство подключен к второму входу перемножителя, а управляющие входы интегратора и запоминающего устройства соединены с выходом датчика углового положения. (Л с го со СХ5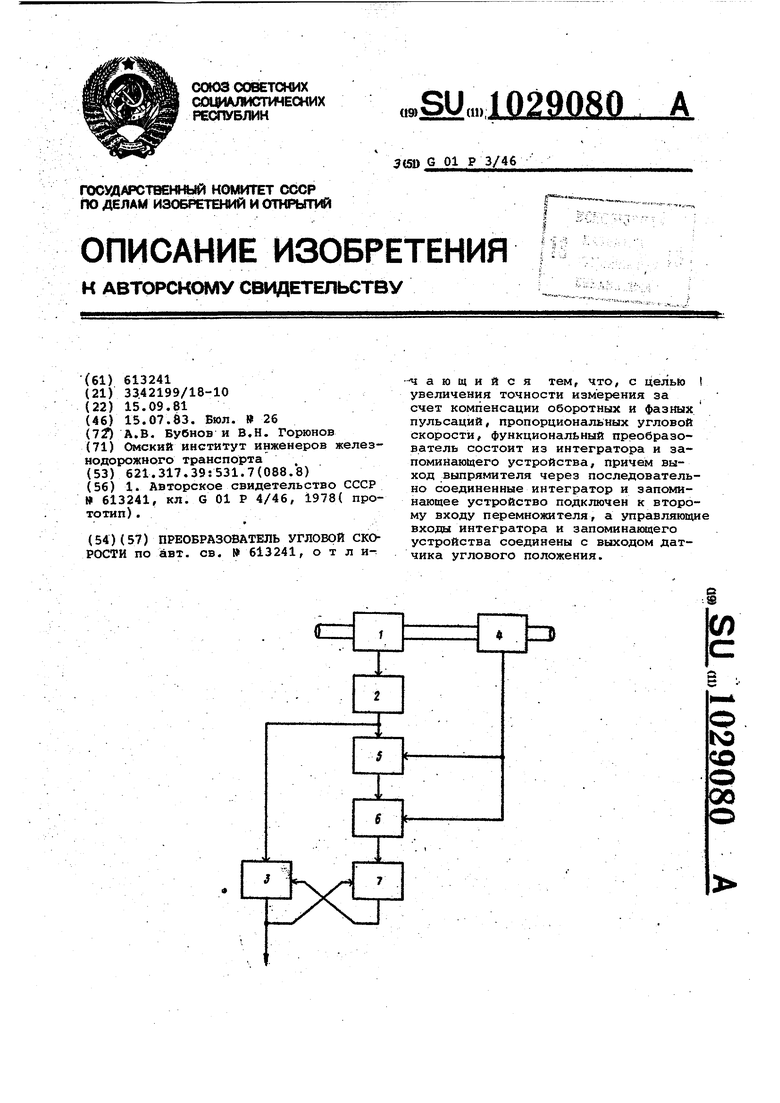
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения угловой скорости | 1977 |
|
SU613241A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
