Изобретение опноснтся к вычислительной техНике, а ьменно к классу арифд1етичесАих устройств, и быть использова.но в цифровых .вычислительных машинах.
Известно арифметическое устройство для вычисления тритонометрических функций, построенное на базе алгоритма Волдера и содержащее три регистра, блок памяти, д.ва узла сдвига, три двухчислоБых су.м.матора и блок ушравления I.
Одиако такое устройство .имеет .низкое быстродействие.
Наиболее близким техническим решением к изобретению является устройство для вычисления тригонометрических функций 2, соде.ржащее блок управления, три сумматора, три регистра, два узла сдвига, два блока переключения, два элемента И, элемент ИЛИ, блок падьяти, счетчик итераций и узел начальных условий. Первый выход блока управления соединен с первыми входами сумматоров и перзы1 входом счетчика итераций, второй вход которого подключен к выходу узла начальных условий, а выход - к первым входам обоих узлов сдвига и через блокламяти ко второму входу первого сумматора, третий вход кото.рого соединен с .выходо.м первого «регистра и первым входом первого элемента И. Выход первого сумматора .подключен к Входу первого регистра, второй выход олока управления - к второму входу первого элемента И, выходом связанного первым входом элемента ИЛИ, второй вход которого соединен с выходом второго элемеита И. Первый зход второго элемента И подключен к третьему выходу блока управления, а второй его вход - к второму входу второго сумматора, второму входу первого узла сдвига и через, второй регистр к выхо.ду второго сумматора Третий вход второго сумматора лодсоединен к первому выходу второго узла сдвига и- лервому входу первого блока переключения, а второй вход первого блока переключеиия - к первому выхо.ду первого узла сдвига, вторым выходом подключенного к второму входу третьего сумматора и первому входу второго блока переключения, второй вход которого соединен с вторым вы.ходом второго узла сдвига. Вы.ходы второго блока переключения подключены к четвертому и пятому входам второго сумматора, третий вход третьего сумматора соединен с вторым БХО.ДОМ второго узла сдвига и через третий регистр с выходом третьего сумматора. Четвертый и лятый входы третьего сумматора по.чключены к выходам первого блока переключения.
Недостаткам известного }-стройства является HiMSKoe быстродействие.
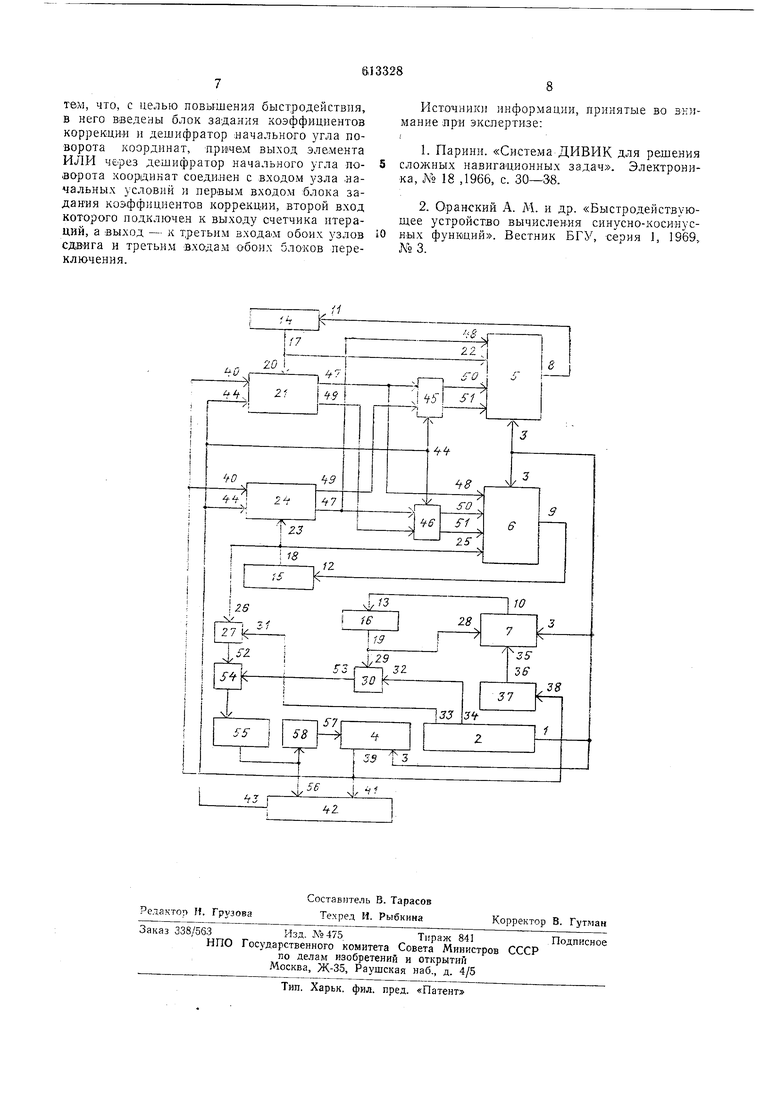
Цель изобретения - повышен-ие быстродействия устройства путем сокращения числа итераций s результате олределеклл с ючностью до старшего разряда на:чалького угла поворота в опера|Циях Волдера. Поставленная цель достигается тем, что в устройство для вычисления т.ркгонометрических функций введены блок задания козффи1циенто-з коррекции и дешифратО:р начального угла .поворота координат, причем .выход элемента ИЛИ через дешифратор начального угла поворота координат соединен с входом узла начальных условий и первым входом блока задания коэффициентов коррекции, второй вход которого подключен к выходу счетчика итераций, а выход - к третьим входам обоих узлов сдвига и третьим обоих блоков переключения. На чертеже представлена схема устройства для вычисления тригонометрических функций. Выход / блока 2 управления соединен с .авляющими входами 3 счетчика 4 итераций и сум 1аторов 5, 6 и 7, выходы 8, 9 и 10 которых подключены соответственно к входам //, 12, 13 регистров М, 15, 16. Выходы П, IS, 19 регистров 14, 15, 16 сое динены соответственно с входом 20 узла 21 сдвига, входом 22 сумматора 5, с входом 23 узла 24 сдвига, входом 2-5 сум.матора 6 и входом 26 паразрядных элементов И 27, с входом 28 сумматора 7 и входом 29 .поразрядных элементов И 30. Управляющие -входы 31 и 32 поразрядных элементов И 27, 30 соединены соответственно с выходами 33 и 34 блока 2 управления, второй вход 35 сумматора 7 - с выходом 36 блока 57ламяти, вход 38 которого связан с выходом 39 счетчика 4 итераций, входами 40 узлов 21, 24 сдвига и входо.м 41 блока 42 задаAA arctg 2-«-
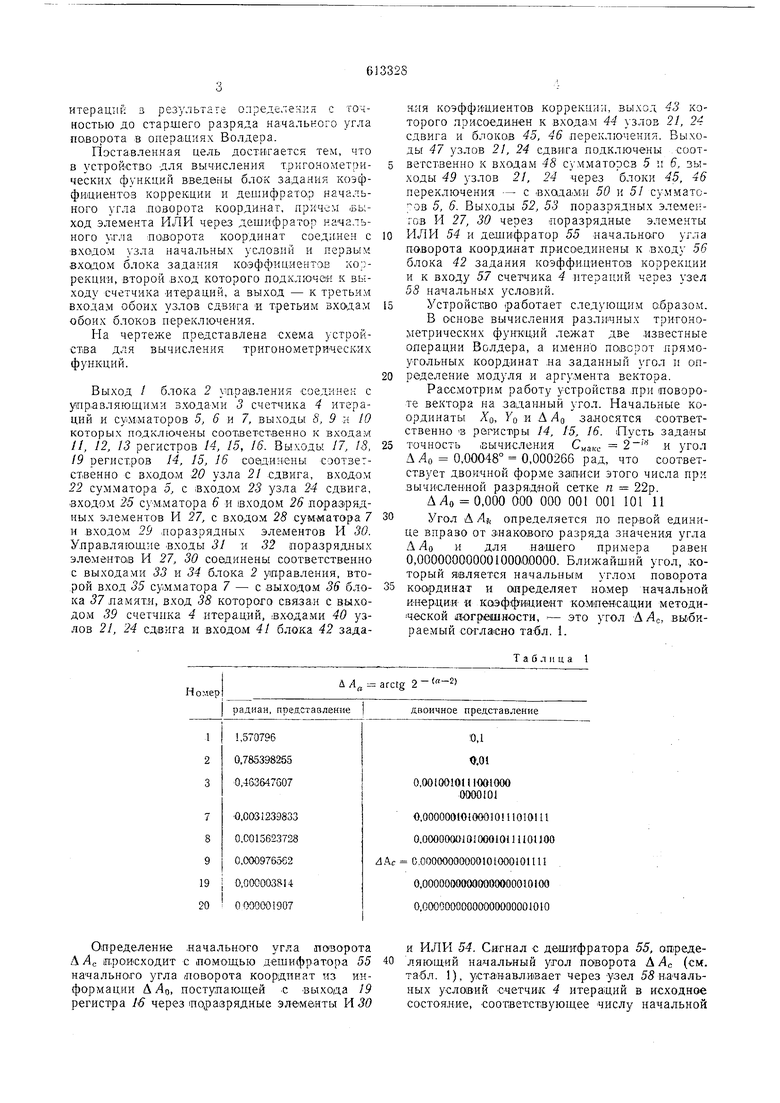
Номер кия ко9ффи;циентов коррекции, выход 43 которого присоединен к входал 44 -злов 21, 24 сдвига и блоков 45, 46 лереключения. Выходы 47 узлов 21, 24 сдвига подключены соответственно к входам 48 сумматоров 5 п 6, зыходы 49 узлов 21, 24 через блоки 45, 46 переключения - с входа м.и 50 и 5/ сумматс ов 5, 6. Выходы 52, 53 поразрядных элемеи:о:в И 27, 30 через поразрядные элементы ИЛИ 54 и дешифратор 55 начального угла поворота координат присоединены к входу 56 блока 42 задания коэффициентов коррекции и к входу 57 счетчика 4 итераций через узел 5S начальных условий. Устройство работает следующим ойразом. В основе вычисления различных тригонометрических функций лежат две .известные операции Волдера, а именно павсрот прямоугольных координат .на заданный угол и определение модуля и аргумента вектора. Рассмотрим работу устройства .при повороте вектора на заданный угол. Начальные координаты Хо, YQ И А AQ заносятся соответственно В рвгист1ры 14, 15, 16. Пусть заданы точность вычисления С.„акс 2 .и угол Д Ло 0,00048° 0,000266 рад, что соответствует двоичной форме записи этого числа при вычисленной разрядной сетке п 22р. АЛо 0,000 000 000 001 001 101 И Угол Д /l.ji определяется по пер.вой единице вправо от знакового разряда значения угла Д Ло и для нашего примера равен 0,00000000000100000000. Ближайший угол, .который является начальным углом поворота коо/рдинат и определяет но,мер начальной инердий я каэф.фи1цие«т камленсации методической яогрешностн, - это угол А Лс, вььбираемый со-глаено табл. 1. Таблица 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровое устройство для вычисления синусно-косинусных функций | 1980 |
|
SU926651A1 |
| Устройство для реализации двумерного быстрого преобразования фурье | 1983 |
|
SU1142845A1 |
| Устройство для отображения информации | 1972 |
|
SU458004A1 |
| Устройство для решения задач оптимального управления | 1985 |
|
SU1327135A1 |
| Интерполятор | 1988 |
|
SU1541557A1 |
| Устройство преобразования координат | 1987 |
|
SU1472902A1 |
| Мультипроцессорное вычислительное устройство с параллельной обработкой информации | 1972 |
|
SU492880A1 |
| Устройство для определения области устойчивой работы технических объектов | 1984 |
|
SU1241197A1 |
| Преобразователь координат | 1988 |
|
SU1566345A1 |
| Устройство для поворота вектора | 1982 |
|
SU1076910A1 |
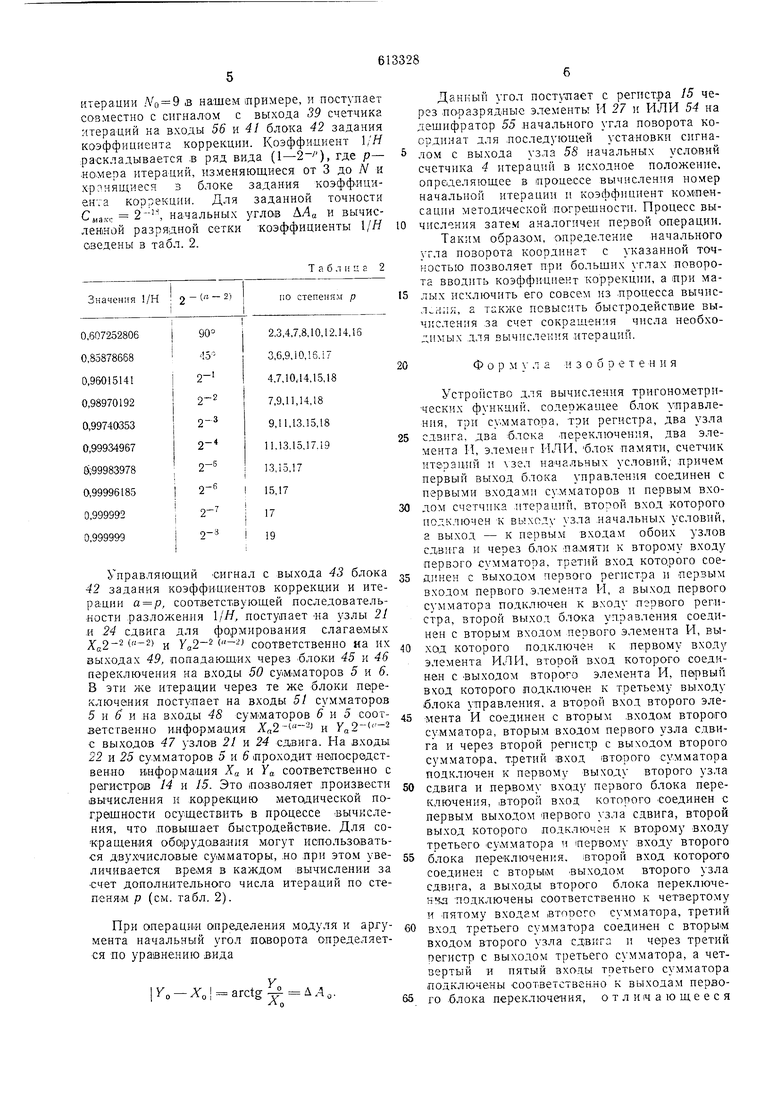
Определение начального угла поворота Д Л(. происходит с помощью дешифратора 55 40 начального угла (Поворота кооряинат из информации Д Ло, поступающей с выхода 19 регистра 16 через in ор аз рядные элементы 30 и ИЛИ 54. Сигнал с дешифратора 55, огаределяющий нача.льный угол поворота Д Лс (см. та-бл. 1), уста«авли1вает через узел 58 начальных условий счетчик 4 итераций в исходное состояние, соответствующее числу начальной ктера.ции iVo 9 ,в нашем примере, и по,ступает совместно с сигналом с выхода 39 счетчика итераций на входы 56 к 41 блока 42 задания коэффициента коррекции. Коэффициент 1,Я раскладывается в ряд вида (1-2-/), где р- итераций, изменяющиеся от 3 до TV и хранящиеся з блоке задания коэффициента коррекции. Для заданной точности Смает начальных углав АЛа и вычислен1Нйй разрядной сетки коэффициенты 1/Я сведены в табл. 2. Таблица 2 , - (а - 2) Значения /Н ПО степенял р Управляющий -сигнал с выхода 43 блока 42 задания коэффициентов коррекции и итерации а р, соответствующей последовательности разложения 1/Я, поступает -на узлы 21 .и 24 сдвига для формирования слагаемых 2- («-2) JJ ( соответственно на их вы.ходах 49, попадающих через -блоки 45 и 46 переключения на входы 50 сум маторов 5 к 6. В эти же итера:ции через те же блоки пар-еключения поступает на входы 51 сумматоров 5 11 6 на входы 48 сум-маторов 6 и 5 соответственно информация Х„2-(--) и выходов 47 узлов 21 и 24 сдвига. На входы 22 и 25 сумматоров 5 и 5 проходит непосредственно ниформа ция Ха. и УВ соответственно с регистров 14 и 15. Это позволяет произвести вычисления и коррекцию методической погрешности осуществить в процессе вычисления, что повышает быстродействие. Для сокращения оборудования могут использоваться двух:числовые сумматоры, .но при этом увеличивается время в каждом вычислении за счет дополнительного числа итераций по степеня-м р (см. табл. 2). При операции определения модуля и аргумента начальный угол поворота определяется по уравнению вида :arctg A.A, Y F I Mo 0 I Данный угол поступает с регистра 15 через поразрядные элементы И 27 и ИЛИ 54 на дешифратор 55 начального угла поворота координат для последующей установки сигналом с выхода узла 58 начальных условий счетчика 4 итераций в исходное положение, определяющее в процессе вычисления номер начальной итерации и коэффициент компенсации методической погрешности. Процесс вычисления затем аналогичен первой операции. Таким образом, онределение начального угла поворота координат с указанной точностью позволяет при больших углах поворота ввод1 ть коэффициент коррекции, а при малых исключить его совсем из процесса вычисл ник, а также повысить быстродейст|Вие вычисления за счет сокращения числа необходимых для вычисления итераций. Фор м у л а и 3 о б р е т е н и я YcTpoiicTBO для вычисления тригонометрических функций, содержащее блок управления, три сумматора, три регистра, два узла сдвига, два блока переключения, два элемента И, элемент ИЛИ, блок памяти, счетчик итераций и зел на-чальных условий,- причем первый выход блока управления соединен с первыми входами сумматоров и первым входом счетчика итераций, второй вход которого подключен к выходу узла .начальных условий, а выход - к первым входам обоих узлов сдвига и через блок :па,мяти к второму входу первого сумматора, третий вход кото.рого соединен с выходом первого регистра и первым входом первого элемента И, а выход первого с}мматора подключен к .входу пгрвого регистра, второй выход блока уаравления соединен с вторым входом первого элемента И, выход которого подключен к первому входу элемента ИЛИ, второй вход которого соединен с ВЫХОДОМ второго элемента И, первый вход которого подключен к третьему выходу блока управления, а второй вход второго элемента И соединен с вторым .входол второго сумматора, вторым входом первого узла сдвига и через второй регистр с выходом второго сумматора, третий вход второго сумматора подключен к первому выходу второго узла сдвига и первому входу первого блока переключения, второй вход которого соединен с первым выходом первого узла сдвига, второй выход которого подключен к второму входу третьего сумматора ч inepBOMy входу второго блока переключения, второй вход которого соединен с вторым выходом второго узла сдвига, а выходы второго блока переключен«з подключены соответственно к четвертому и пятому входам ,втооого сумматора, третий вход третьего сумматора соединен с вторым входом второго узла и через третий пегистр с выходом третьего сумматора, а четвертый и пятый входы третьего сумматора подключены соответственно к выходам первого блока переключения, отличающееся
тем, что, с целью повышения быстродействия, в него введены блок задания коэффициентов коррекции и дешифратор «ачального угла поворота координат, причем выход элемента ИЛИ через дешифратор начального угла поварота координат соединен с выходом узла .начальных условий и первым входом блока задания коэффициентов коррекции, второй вход которого подключен к выходу счетчика итераций, а выход - к третьим входном обоих узлов сдВИга и третьим входам обоих блоков переклк чения.
Источники информации, принятые во внимание лрИ экспертизе:
