(54) СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод | 1976 |
|
SU615452A1 |
| Следящий электропривод | 1985 |
|
SU1259207A2 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1990 |
|
RU2037869C1 |
| Следящая система | 1975 |
|
SU547726A1 |
| Электропривод постоянного тока | 1974 |
|
SU592001A1 |
| Электропривод постоянного тока | 1979 |
|
SU824392A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2017 |
|
RU2658678C1 |
| Электропривод постоянного тока | 1984 |
|
SU1241397A1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1734184A2 |
| Способ фазирования вращающегося вала электродвигателя | 1984 |
|
SU1272444A1 |
1
Изобретение относится к системам автоматического управления.
По основному авт. св. № 615452, известно устройство, содержащее последователь-. но соединенные двигатель постоянного тока, редуктор, датчик шагов, датчик рассогласования и блок анализа и переключения режимов движения, соединенный с генератором низкой частоты, а также через ждущий генератор импульсов с датчиком щагов 1.
Недостатком этого электропривода является неравномерность его движения в зоне максимальной скорости (зона А) при изменении момента нагрузки на валу двигателя. По этой причине известный электропривод нельзя использовать для управления различными технологическими процессами, требующими равномерного перемещения исполнительного механизма (например, в системах числового программного управления станками, в системах сканирования и регистрации изображений и др.), что сужает область использования электропривода. Кроме того, неодинаковые скорости входа привода в зону торможения .(зона Б) отрицательно сказываются на качестве и скорости процесса установки двигателя в заданную позицию.
Цель изобретения - расщирение области использования привода.
Цель достигается тем, что в привод введен дополнительный ждущий генератор импульсов, вход которого подключен к выходу датчика шагов, а выход - к входу блока анализа и переключения режимов движения.
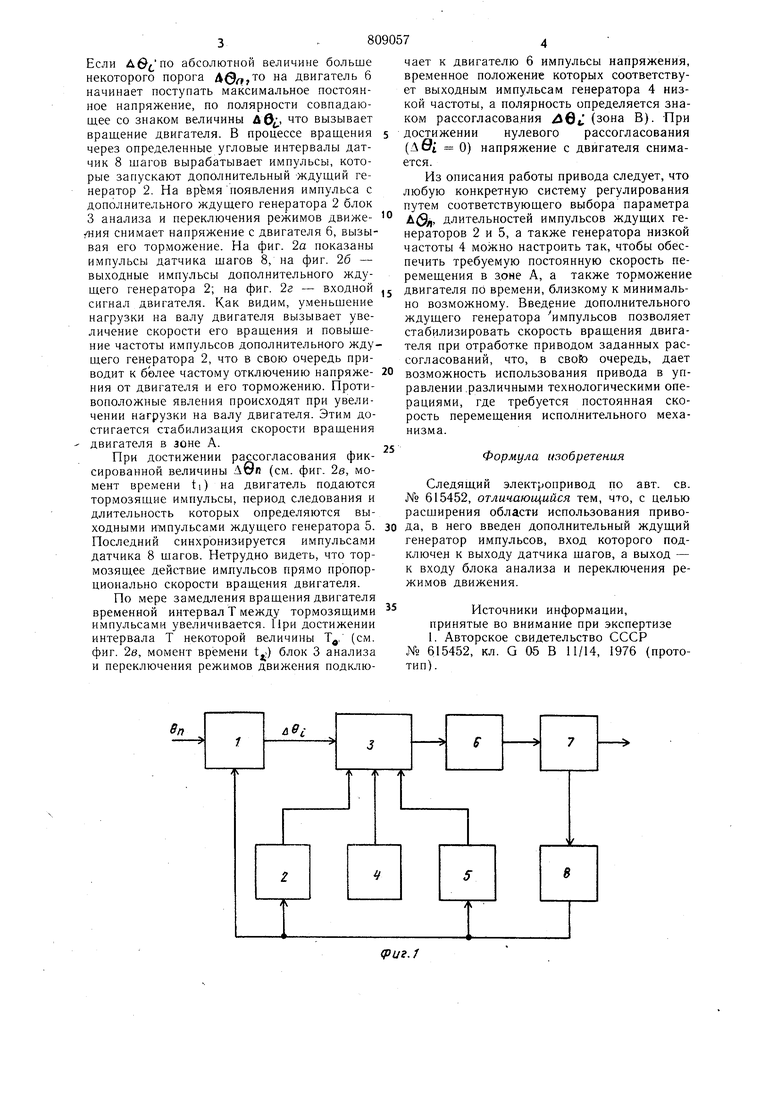
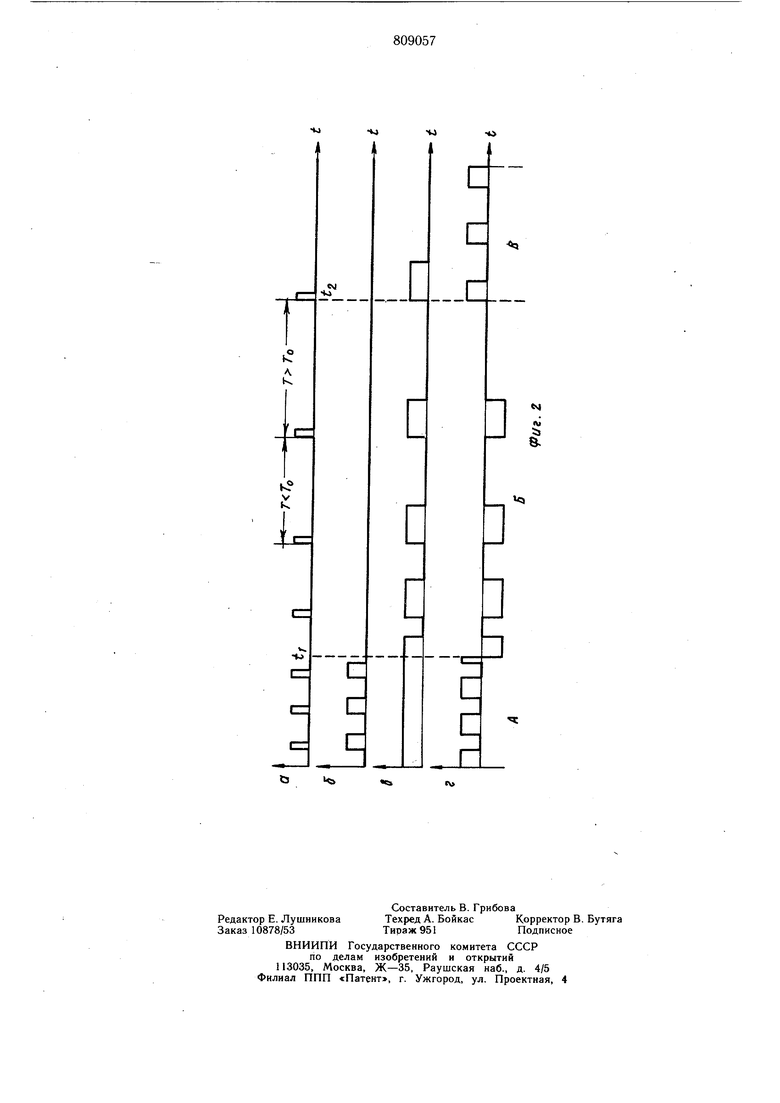
На фиг. 1 приведена блок-схема электропривода; на фиг. 2 - циклограмма его работы.
Привод состоит из датчика 1 рассогласования, ждущих генераторов дополнительного 2 и 5 импульсов, блока 3 анализа и переключения режимов движения, генератора 4 низкой частоты, двигателя 6 постоянного тока, редуктора 7 и датчика 8 щагов.
Расстояние до требуемой позиции задается знакопеременной величиной 0„, изм ряемой числом щагов датчика 8. Датчик 1 рассогласования в зависимости от направления вращения двигателя 6 суммирует или вычитает импульсы, поступающие с датчика 8. Полученное таким образом текущее рассогласование Л0 поступает на блок 3 анализа и переключения режимов движения. Если абсолютной величине больше некоторого порога Д0(Г,,то на двигатель 6 начинает поступать максимальное постоянное напряжение, по полярности совпадающее со знаком величины Л&, что вызывает вращение двигателя. В процессе вращения через определенные угловые интервалы датчик 8 шагов вырабатывает импульсы, которые запускают дополнительный -ждущий генератор 2. На врЬмяпоявления импульса с дополнительного ждущего генератора 2 блок 3 анализа и переключения режимов движе/ния снимает напряжение с двигателя 6, вызывая его торможение. На фиг. 2а показаны импульсы датчика щагов 8, на фиг. 26 - выходные импульсы дополнительного ждущего генератора 2; на фиг. 2г - входной сигнал двигателя. Как видим, уменьшение нагрузки на валу двигателя вызывает увеличение скорости его вращения и повышение частоты импульсов дополнительного ждущего генератора 2, что в свою очередь приводит к белее частому отключению напряжения от двигателя и его торможению. Противоположные явления происходят при увеличении нагрузки на валу двигателя. Этим достигается стабилизация скорости вращения двигателя в зоне А. При достижении рассогласования фиксированной величины Д0П (см. фиг. 2в, момент времени ti) на двигатель подаются тормозящие импульсы, период следования и длительность которых определяются выходными импульсами ждущего генератора 5. Последний синхронизируется импульсами датчика 8 щагов. Нетрудно видеть, что тормозяплее действие импульсов прямо пропорционально скорости вращения двигателя. По мере замедления вращения двигателя временной интервал Т между тормозящими импульсами увеличивается. При достижении интервала Т некоторой величины Т, (см. фиг. 28, момент времени ) блок 3 анализа и переключения режимов движения подключает к двигателю 6 импульсы напряжения, временное положение которых соответствует выходным импульсам генератора 4 низкой частоты, а полярность определяется знаком рассогласования (зона В). При достижении нулевого рассогласования (1 0) напряжение с двигателя снимается. Из описания работы привода следует, что любую конкретную систему регулирования путем соответствующего выбора параметра , длительностей импульсов ждущих генераторов 2 и 5, а также генератора низкой частоты 4 можно настроить так, чтобы обеспечить требуемую постоянную скорость перемещения в зоне А, а также торможение двигателя пО времени, близкому к минимально возможному. Введение дополнительного ждущего генератора импульсов позволяет стабилизировать скорость вращения двигателя при отработке приводом заданных рассогласований, что, в своК) очередь, дает возможность использования привода в управлении.различными технологическими операциями, где требуется постоянная скорость перемещения исполнительного механизма. Формула изобретения Следящий электропривод по авт. св. № 615452, отличающийся тем, что, с целью расщирения области использования привода, в него введен дополнительный ждущий генератор импульсов, вход которого подключен к выходу датчика щагов, а выход к входу блока анализа и переключения режимов движения. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 615452, кл. G 05 В 11/14, 1976 (прототип).
4JН4
4J
ч
