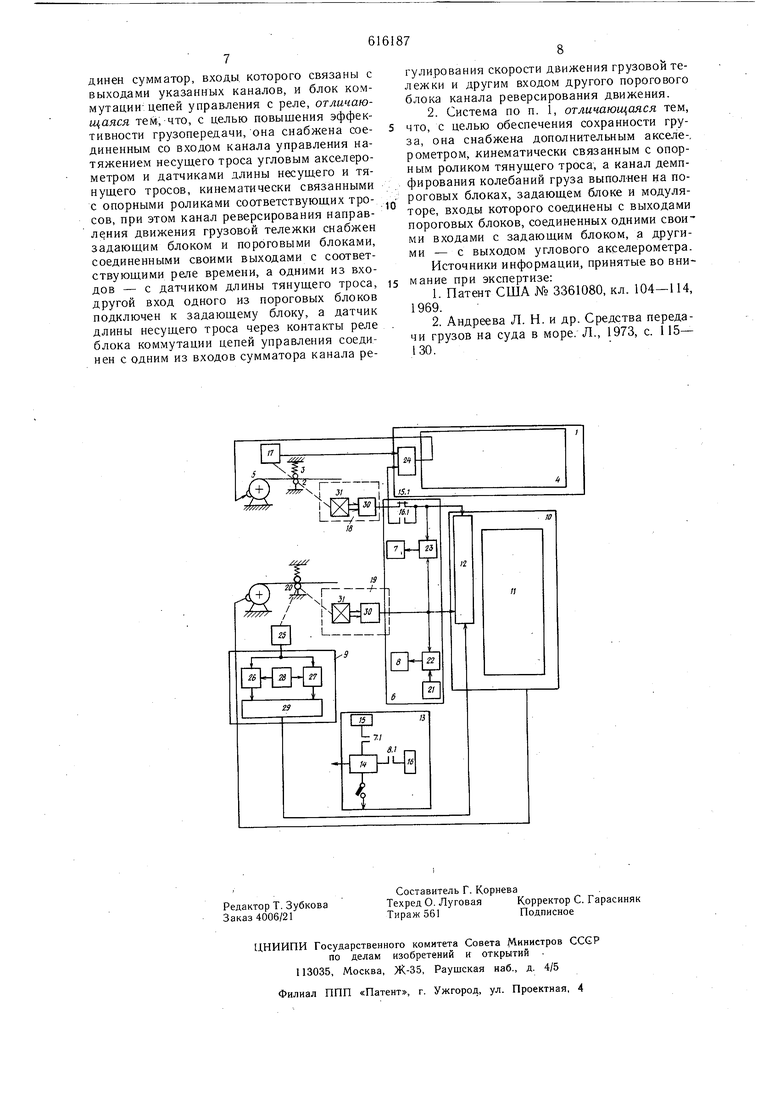
акселерометром и датчиками длины несущего и тянущего тросов, кинематически связанными с опорными роликами соответствующих тросов, при этом канал реверсирования направления движения грузовой тележки снабжен задающим блоком и пороговыми блоками, соединенными своими выходами с соответствующими реле времени, а одним из входов - с датчиком длины тянущего троса, другой вход одного из пороговых блОков подключен к задающему блоку, а датчик длины несущего троса через контакты реле блока коммутации цепей управления соединен с одним из входов сумматора канала регулирования скорости движения грузовой тележки и другим входом другого порогового блока канала реверсирования движения. Кроме того, для обеспечения сохранности груза, система может быть снабжена дополнительным акселерометром, кинематически связанным с опорным роликом тянущего троса, а канал демпфирования колебаний груза выполнен на пороговых блоках, задающем блоке и модуляторе, входы которого соединены с выходами пороговых блоков, соединенных одними своими входами с задающим блоком, а другими - с выходом углового акселерометра. На чертеже приведена функциональная схема системы. Система состоит из канала1 управления натяжением пропущенного между опорным 2 и прижимным 3 роликами несущего троса, содержащего электромеханический следящий привод 4 лебедки 5, канала 6 реверсирования направления движения грузовой тележки с реле 7 и 8 времени, канала 9 демпфирования колебаний груза и канала 10 регулирования скорости движения грузовой тележки с .электромеханически.м следящим приводом 11, ко входу которого подсоединен сумматор 12, связанный своими входами с выходами указанных каналов, а также блок 13 коммутации цепей управления с источником 14 питания реле 15 и 16. Ко входу канала 1 подключен угловой акселерометр 17 и датчики 18 и 19 длины несущего и тянущего тросов, которые кинематически связаны с опорными роликами 2 и 20 соответствующих тросов. Канал 6 соетоит из задающего блока 21 и пороговых блоков 22 и 23, соединенных своими выходами с реле 7 и 8 времени. Одни из входов блоков 22 и 23 подключены к датчику 19 длины тянущего троса. Другой вход блока 22 подключен к задающему блоку 21. Датчик 18 длины несущего троса через контакты 15.1 и 16.1 реле 15 и 16 соединен с одним из входов сумматора 12 канала 10 и другим входом порогового блока 23 и непосредственно - с одним их входов сумматора 24 канала 1. Система содержит также дополнительный угловой акселерометр 25, кинематически связанный с опорным роликом 20 тянущего троса. Канал 9 состоит из пороговых блоков 26 и 27, задающего блока 28 и модулятора 29, входы которого соединены с выходами блоков 26 и 27, соединенных одними своими входами с задающим блоком 28, а другими - с выходом углового акселерометра 25. Датчики 18 и 19 выполнены идентично на линейно вращающихся трансформаторах 30 и редукторах 31. Система работает следующим образом. После установки между разгружаемым и принимающим судами канатной дороги от судовой сети подается напряжение на источник 14 питания, который обеспечивает питанием все элементы системы, в этот момент времени включается канал 1 управления натяжением несущего троса, который функционирует так. Напряжение питания 110 В (частота 400 Гц) с источника 14 поступает на первичную обмотку линейно вращающегося трансформатора 30 датчика 18 длины несущего троса, на который через редуктор 31 заводится угол поворота прижимного ролик,а 3 несущего троса. Напряжение, снимаемое с выхода датчика 18, представляет собой информацию о длине вытравленного несущего троса. Это напряжение поступает на вход сумматора 24. На второй вход этого же сумматора поступает напряжение с углового аксе терометра 17, измеряющего с помощью прижимного ролика 3 линейные ускорения несущего троса. Напряжение с сумматора 24 поступает на вход привода 4 лебедки 5. В момент, когда тележка с передаваемым грузом подготовлена к движению к принимающему судну, подается питание с источника 14 через выключатель на все остальные каналы системы, что обеспечивает приведение их в рабочее состояние. Канал 10 регулирования скорости движения грузовой тележки работает следующим образом. Сигнал с датчика 18 длины, несущего троса подается через контакты 15.1 реле 15 на первый вход сумматора 12, на второй вход которого с датчика 19 длины тянущего троса подается в противофазе первому сигналу напряжение, пропорциональное этой длине. С сумматора 12 результирующий сигнал, равный алгебраической сумме, поданных на его вход сигналов, поступает на привод 11. Напряжение обратной связи с привода 11 компенсирует алгебраическую сумму первых двух сигналов, что определит на входе привода сигнал, равный нулю, и, следовательно, зафиксируется определенное перемещение регулятора рабочего давления в гидросистеме лебедки тянущего троса. Таким образом, перемещение регулирующего органа давления гидросистемы будет пропорционально результирующему сигналу, который представляет собой информацию о расстоянии между тележкой с грузом и приемным устройством, что в конечном итоге определяет пропорциональную зависимость скорости движения тележки с грузом от расстояния между ней и приемным устройством. Такая зависимость определяет плавное снижение скорости тележки с грузом до нуля в месте его приема. Канал 6 реверсирования направления движения грузовой тележки/ работает следующим образом. В момент, когда тележка с грузом начинает свое движение от передающего к принимающему устройству, напряжение от датчика 18 дЛины несущего троса подается через контакты 15.1 реле 15 на первый вход порогового блока 23. На второй вход порогового блока 23 подается напряжение с датчика длины 19 тянущего троса, которое в начальный момент движения тележки с грузом равно нулю и возрастает пропорционально, по .мере удаления тележки от передающего устройства. Пороговый блок 23 срабатывает тогда, когда подаваемое на его второй вход напряжение сравняется по амплитуде с первым сигналом или превзойдет его (это произойдет в моменг достижения тележкой с грузом приемного устройства). На его выходе появится напряжение, которое подается на реле 7 времени. Через определенный промежуток времени, который соответствует среднему времени, необходимому для снятия груза или замены контейнера с грузом пустым контейнером, срабатывает реле 7 времени и подключает своими нормально разомкнутыми контактами 7.1 реле 15 к источнику 14. Реле 15 срабатывает и отключает своими нормально замкнутыми контактами 15.1 датчик 18 длины несущего троса от сумматора 12. В этот мо.мент на вход сумматора 12 подается только напряжение с датчика 19 длины тянущего троса, которое заведено на сумматор 24 в противофазе первому сигналу, что и определяет реверсирование направления движения грузовой тележки в сторону передающего устройства. Пороговый блок 22 срабатывает тогда, когда подаваемое на его второй вход напряжение от задающего блока 21 равно или превосходит напряжение, подаваемое на его первый вход от датчика 19 длины тянущего троса. Напряжение от задающего блока 21 устанавливается такой относительно малой величины, которая обеспечивает срабатывание порогового блока 22 в момент достижения тележкой без груза или с пустым контейнером передающего устройства. При срабатывании порогового блока 22 на его выходе появляется напряжение, которое подается на реле 8 времени. Это реле срабатывает через определенный заданный промежуток времени, равный среднему времени для обеспечения закрепления груза с контейнером к тележке, и подключает своими .нормально разомкнутыми контактами 8.1 питание источника 14 на реле 16, которое, в свою очередь, своими нормально разомкнутыми контактами 16.1 подключает напряжение с датчика 18 длины несущего троса одновременно ко входам су.мматора 12 и порогового блока 23, который отключается, так как напряжение по первому входу превосходит напряжение по второму и, следовательно, реле 7 времени отключится и своими контактами 7.1 разомкнет цепь питания реле 15, которое, в свою очередь, своими нормально замкнутыми контактами 15.1 дополнительно (для большей надежности) подключит напряжение с выхода датчика 18 на вход порогового блока 23 и сумматора 12. Это определяетследующий аналогичный цикл чатночного автоматического движения тележки по канатной дороге между передающим и принимающим устройствами. Капал 9 демпфирования колебаний передаваемого груза, выполняющий одновременно роль автоматического устройства запрета недопустидмых перегрузок (ускорений) контейнера с грузом работает следующим образом. Напряжение с выхода углового акселерометра 25, измеряющего линейные ускорения тянущего троса, подается одновременно на вход двух пороговых блоков 26 и 27, на второй вход которых с задающего блока 28 поступает опорное напряжение, соответствующее максимально допустимым ускорениям тянущего троса (тележки с грузом) . Пороговые блоки 26 и 27 срабатывают при равенстве сигналов, подаваемых на их первые входы, сигналам на вторых входах или превосходящих их. При этом пороговый блок 27 настроен на напряжение положительной полярности, снимаемое с углового акселерометра 25, а пороговый блок 26 настроен на напряжение отрицательной полярности. При срабатывании одного из пороговых блоков 26 или 27 напряжение с него подается на модулятор 29, который модулирует с частотой 400 Гц это напряжение. С выхода модулятора 29 напряжение подается на четвертый вход сумматора 12, на котором это напряжение складывается в.противофазе к основному входному сигналу, определяющему скорость движения грузовой тележки, что в-конечном счете обеспечивает демпфирование движения грузовой.-тележки и запрет недо{1устимых перегрузок.. Формула изобретения 1, Систе.ма автоматического управления передачей сухих грузов между судами на ходу, содержащая канал управления н-атяжением пропущенного между опорным и прижимны.м роликами.несу щего троса с электромеханическим следящим приводом лебедки, канал реверсирован-ия направления движения грузовой тележки с реле времени, канал . демпфировани.я колебаний груза и канал регулирования скорости движения грузовой тележки, содержащий электромеханический следящий привод, ковходу которого подсое
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления двухканатной грузовой дорогой между судами в море на ходу | 1974 |
|
SU600025A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМНЫМ КРАНОМ | 2012 |
|
RU2574047C2 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| Измеритель вязкости жидкости | 1989 |
|
SU1702251A1 |
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1981 |
|
SU988649A2 |
| Устройство для стабилизации на заданной глубине опущенных на канате объектов | 1976 |
|
SU598793A1 |
| ПОДВЕСНАЯ УСТАНОВКА ДЛЯ УЛЬТРАФИОЛЕТОВОГО ОБЛУЧЕНИЯ ПТИЦ | 1967 |
|
SU190723A1 |
| Система передачи грузов между судами в море | 1988 |
|
SU1594063A1 |
| Устройство для передачи людей и грузов в море | 1976 |
|
SU602404A1 |
| СКАНИРУЮЩИЙ ДЕФЕКТОСКОП | 2009 |
|
RU2402760C1 |
