(54) УСТРОЙСТВО -ДЛЯ СПУСКА И ПОДЪЕМА ЛЮДЕЙ. И ГРУЗОВ С СУДНА НА СУДНО В МОРЕ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1977 |
|
SU747769A1 |
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1976 |
|
SU660889A1 |
| Устройство для передачи людей и грузов в море | 1976 |
|
SU602404A1 |
| Система для безударной передачи гРузА C СудНА HA СудНО B уСлОВияХВОлНЕНия МОРя | 1979 |
|
SU816867A1 |
| Устройство для пересадки людей с судна на судно в условиях качки | 1975 |
|
SU695891A1 |
| Судовое спуско-подъемное устройство для плавающих объектов | 1988 |
|
SU1569280A1 |
| Судовое грузовое устройство | 1974 |
|
SU514743A1 |
| СУДОВОЙ КРАН | 2002 |
|
RU2241633C2 |
| Следящее устройство к судовым кранам для безударной передачи груза с одного судна на другое | 1978 |
|
SU765103A1 |
| Устройство для передачи людей и грузов в море с обслуживающей платформы на судно | 1981 |
|
SU954320A1 |
Изобретение относится к судостроению, в частности к устройствам для спуска и подъема людей и грузов с судна на судно в море.
По основному авт.св. № 747769 из- . вестно устройство для спуска и подъема людей и грузов с судна на судно в море, содержащее стрелу с грузовым канатом, заведенным одним концом на грузовую лебедку, а другим концом посредством соединительного узла и узла компенсации качки, содержащего гидродилиндр с пневмогидроаккумулятором, связанным с грузовой кабиной,, а также содержащее узел выборки слабины грузового каната, включающий вспомогательный канат, подпружиненную гильзу с пазом, электромагнитный фиксатор -с рабочим органом, сигнализаторы положения кабины и натяжения грузового каната с электронными блоками реле и источник электрического питания, а соединительный узел содержит захват, щарнирно укрепленный на кабине, и шток, сопрягаемыми одним концом посредством гака с концом грузового каната, а другим.концом связанный со вспомогательным кана.гом, при этом шток гидроцилиндра снабжен на конце подвижной обоймой блоков, .
кабина снабжена обоймой блоков, жестко прикрепленной к ней, а вспомогательный канат заведен через уггомянутые обоймы блоков штока гидродилиндра и кабины и прикреплен к кабине другим концом,. причем подпружиненная гильза установлена с возможностью перемещения в захвате и выполнена со-. прягаемой со штоком электромагнит10ный фиксатор смонтирован на захвате, а его рабочий орган выполнен сопрягаемым через отверстие выполненное в корпусе захвата, с пазом подпружиненной гильзы, при этом захват снаб15жен сухарями со штифтами, корпус захвата выполнен с пазом, сопрягаемым со штифтами сухарей, а последние установлены.с возможностью перемеще-. ния в захвате посредством упомянутых
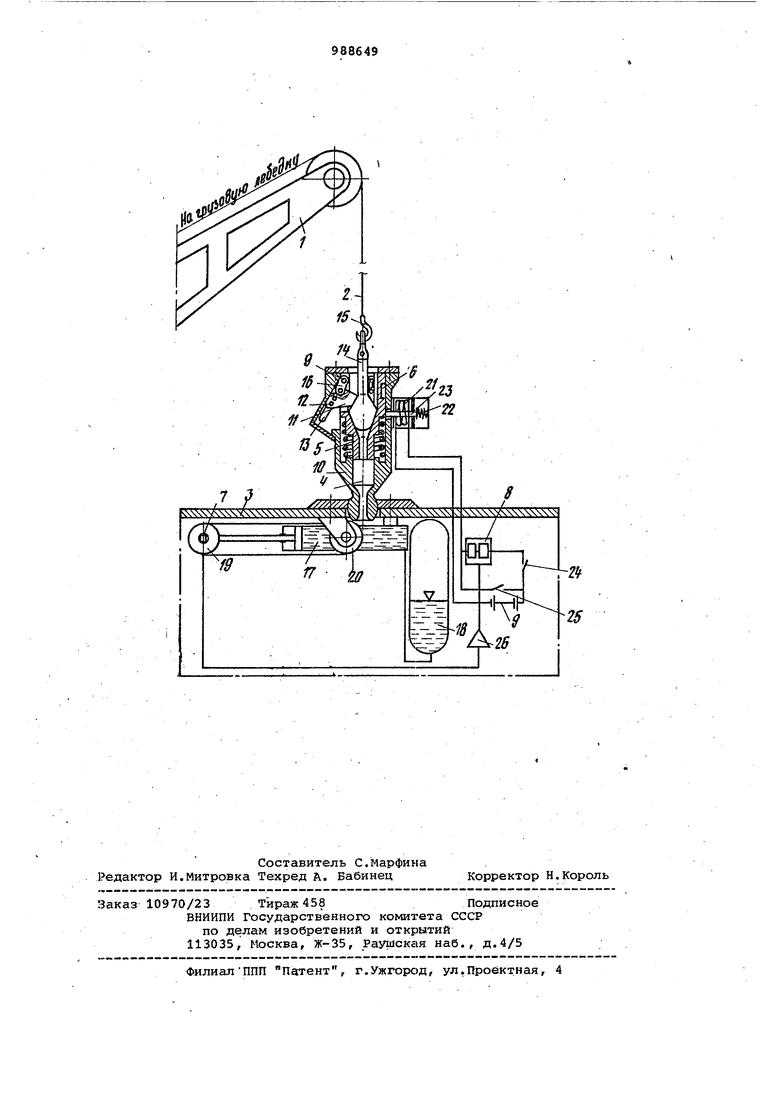
20 паза и штифтов, выполнены сопрягаемлми через прорези, выполненные в подпружиненной гильзе, со штоком и шарнирно связаны посредством тяг с подпружиненной гильзой, причем сигнали25затор натяжения грузового каната и сигнализатор положения кабины связаны электрическими цепями с электронными блоками реле, а последние,соединены электрическим цепями между со30бой, с источником электрического питания и с электромагнитным фиксатором 1. Однако устройство характеризуется недостаточной надежностью его работы за счет возможного повреждения во время работы сигнализатора натяжения грузового каната и положения кабины Цель изобретения -. повышение надежности работы устройства. Цель достигается тем, что сигнали затор натяжения грузового каната и положения кабины выполнен с установленным на штоке поршня гидроцилиндра узла компенсации качки акселерометром и подключенным к его выходу усилителем, выход которого электрически связан со входом электронного блока реле. На чертеже представлено предлагаемое устройство. Устройство содержит стрелу 1 с грузовым канатом 2, заведенным одним концом на грузовую лебедку, а другим посредством соединительного узла и узла компенсации качки, связанным с грузовой кабиной 3. Устройство снабжено механизмом управления, соединительным узлом7 узлом компенсации й- УЗЛОМ выборки слабины грузового канс1та, содержащим вспомогательный канат 4, подпружиненную гильзу 5 с пазом б, электромагнитный фиксатор с рабочим органом, сигнализатор 7 положения кабины 3 и натяжения грузо вого каната 2 с электронным блоком 8 реле и источник 9 электрического питания . Соединительный узел выполнен быстроразъемным и содержит зс1хват, состоящий из корпуса 10, закрепленно го на кабине 3, размещенных на равны расстояниях по окружности корпуса су харей 11 со штифтами 12, сопрягаемым с пазом 13 корпуса, и шток 14, сопря одним концом посредством гака 15 с грузовым канатом 2, а другим кондом связанным со вспомогательным каналом 4. Сухари 11 тягами 16 шарни но связаны с подпружиненной гильзой 15 и через выполненные в ней прорези могут сопрягаться со штоком 14. Узел компенсации качки содержит гидроцилиндр 17 с пневмогидроаккумулятором 18. Шток гидроцилиндра 17 снабжен подвижной обоймой блоков 19, а к кабине 3 жестко крепится обойма блоков 20. Связанный одним концом со штоком 14 вспомогательный канат 4 огибает обе обоймы блоков и крепится другим .концом к кабине 3. Электромагнитный фиксатор смонтирован на корпусе 10 захвата и содержит электрическую ка.тушку 21 и пружину 22, а его рабочий орган выполнен в виде пальца 23,расположенного внутри электрической катушки и сопряженного с пружиной. Через отверстие, выполненное в корпусе 10 захвата, палец 23 прижимается пружиной 22 к гильзе 5 и при ее перемещении относительно корпуса вниз сопрягается с пазом б. Катушка 21 фиксатора соединяется с источником питания 9 через блок реле В и контакты 24, или напрямую через контакты 25. Сигнализатор 7 положения кабины и натяжения грузового каната выполнен в виде акселерометра, установленного на штоке гидроцилиндра 17 узла комр1енсации качки, и усилителя 26, связанного своим входом с акселометром, а выходом - со входом электронного блока 8 реле. Устройство работает следующим образом. Удерживаемая за шток 14 кабина 3 опускается на палубу принимающего судна, совершая вместе с ноком стрелы 1 вертикальное перемещение, обусловjreHHoe качкой. Момент посадки кабины на палубу принимающего судна, также сове|эшающего вертикальные перемещения, обусловленные качкой, сопровождается ударом, смягчаемым встроенным в днище кабины устройством1для мягкой посадки. В момент касания в грузовом канате 2 образуется слабина. Под воздействием натяжения вспомога- . iтельного каната 4 гильза 5,преодолевая сопротивление пружины, перемещается вниз, сухари 11 уходят в прорези гильзы, освобождая шток 14, а палец 23 электромагнитного фиксатора заходит в паз 6, обеспечивая фиксацию гильзы в нижнем положении. Дальнейшие перемещения кабины 3 вместе с палубой принимающего судна относительно штока 14, совершающего, в свою очередь, вертикальные перемещения в месте с ноком стрелы 1, компенсируются узлом компенсации качки. Перед началом подъема замыканием контакта 24 устройство готовится к съему кабины 3 с палубы принимающего судна в наиболее благоприятный момент. Таким моментом является момент максимального сближения кабины 3 вместе с палубой принимающего судна с ноком стрелы 1 в ходе их взаимных перемещений в условиях качки при отсутствии слабины грузового каната 2. Определяется этот момент сигнализатором 7, натяжения грузового каната и положения кабины. При взаимных перемещениях кабины 3 и штока 14 подвижная обойма блоков 19 совершает возвратнопоступательные перемещения. Вместе с ней перемещается датчик сигнгшизатора 7, выполненный в виде акселерометра, вырабатывающего сигнал определенной полярности при движении в том или ином направлении. При перемещении штока влево на выходе, усилителя. 26 появляется сигнал положительной полярности, свидетельствующий о том, что нок стрелы 1 и находящаяся
на палубе принимающего судна кабина 3 сближаются. Перемещение блоков 19 заканчивается, когда шток 14 упирается в находящуюся в нижнем положении гильзу 5. При последующем расхождении uiTOKa 4 и кабины 3 блоки 19 перемещаются в обратном направлении. При этом сигнализатор 7 вырабатывает сигнал отрицательной полярности. При наличии слабины в грузовом канате 2 в ккэмент максимального сближения нока стрелы 1 и палубы Принимающего судна в начале их расхождения блоки 19 неподвижны и сигнализатор 7 начинает вырабатывать- сигнал отрицательной полярности только-после того, как-слабина выбрана. В результате сигнал положительной полярности переходит в сигнал отрицательной полярности с разрывом во времени и съем кабины 3 с палубы принимаквдего судна не происходит Если j грузовом канате 2 слабины нет, возвратно-поступательные перемещения обоймы блоков 19 происходят непрерывно и сигнал положительной полярности без разрыва переходит в сигнал отрицательной полярности. Входящее в электронный блок 8 знакочувствительное реле настраивается на срабатывание в момент Изменения полярности поступающего на него сигнала с положительной на отрицательную без разрыва, что соответствует максимальному сближению нока стрелы 1 с кабиной 3 и отсутствию слабины каната 2. При срабатывании реле подается питание на катушку 21 электромагнитного фиксатора, палец 23 выводится из паза б. В начальный момент последующего расхождения нока стрелы 1 и палубы принимающего судна шток 14 начинает перемещаться относительно корпуса 10 вверх. Вместе с ним перемещается гильза 5, увлекающая за собой сухари 11, которые выходят из прорезей гильзы и сопрягаются со штоком 14. Кабина 3 отделяется от палубы принимающего судна и дальнейший ее подъем осуществляется грузовой лебедкой.
За счет исключения возможности повреждения во время работы устройства сигнализатора натяжения грузового каната и положения кабины повыаается надежность работы устройства.
Формула изобретения
Устройство для спуска и подъема людей и грузов с судна на судно в море по авт.св. 747769, отличающееся тем, что, с целью повышения надежности его работы, сигнализатор натяжения грузового каната и положения кабины выполнен с установленным на штоке поршня гидроцилиндра узла компенсации качки акселерометром и подключенным к его выходу усилителем, выход которого электриче.с-, ки связан с входом электронного блока реле...
Источники информации, принятые во внимание при Экспертизе
