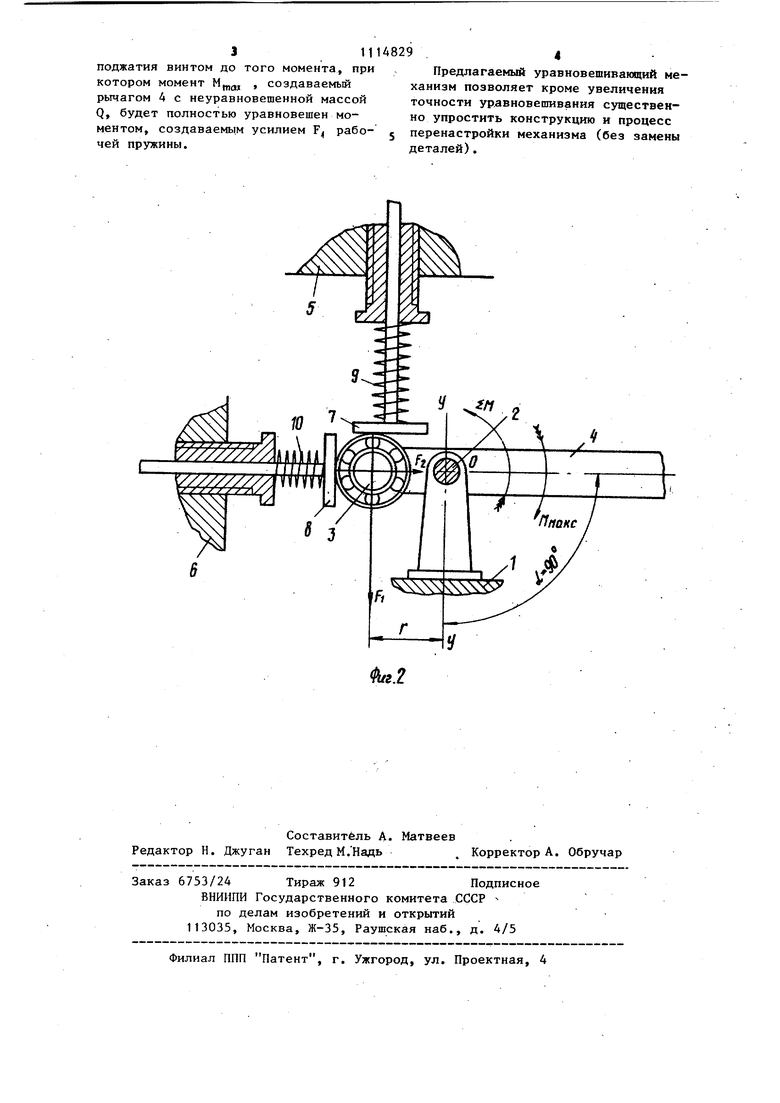
11 Изобретение относится к машиностроению и может быть использовано в роботах, манипуляторах, имитаторах пониженной гравитации для статического у равновешивания масс относитель но осей их вращения. Известен уравновешивающий механиз имитатора пониженной гравитации, содержащий корпус, размещенные в нем вал с профилированным блоком и упругий элемеют, взаимодействующий с профилированном блоком посредством троса, за счет которых и производится уравновещивание звеньев имитатора с грузом fl. Недостатком такого механизма является невысокая точность уравновеши вания из-за наличия тросов и профили рованных блоков, кривизну профиля ко торых выполнить точно по заданному закону практически невозможно. Наиболее близКим к изобретению техническим решением является уравновешивающий механизм, содержащий корпус, размещенные в нем вал с кривошипом и упругий элемент (пружину), взаимодействуюпшй с ним 2. . Недостатком известного механизма является лишь частичное уравновешивание, так как моменты, создаваемые на оси с помощью кривопшпа и пружины и моменты неуравновешенных частей ма нипулятора с грузом изменяются при п вороте оси по различным законам. Цель изобретения - повьш1ение точности уравновешивания. Указанная цель достигается тем, что уравновешивающий механизм, содер жащий корпус, размещенные в нем вал с кривошипом и упругий элемент, взаимодействующий с ним, снабжен взаимно перпендикулярно закрепленными на корпусе двумя направляющими с размещенными в них двумя кулисами, взаимо действующими с кривошипом, и дополни тельным упругим элементом, а каждый упругий элемент размещен на соответствующей кулисе, причем оба упругих элемента выполнены с одинаковой жест костью. На фиг. 1 изображена кинематическая схема уравновешивающего механизма; на фиг. 2 - схема действия уравновешивающих сил. Уравновешива нций механизм содёржит корпус 1, в котором установлен на подшипниках вал 2 с кривошипом 3 и рычагом 4 уравновешиваемого груза 9 Во взаимно перпендикулярных направляющих 5 и 6 корпуса 1 установлены с возможностью осевого перемещения прямолинейные кулисы 7 и 8, подпружиненные в осевом направлении при помощи упругих элементов (пружин) 9 и 10. В положении, показанном на фиг;2, когда одна из направляющих перпендикулярна кривошипу, а другая - параллельна ему, создаваемые пружинами усилия F и FIJ условно названы исходными, причем пружина, вектор усилия которой обозначен символом F, названа рабочей пружиной, а пружина с всктором F - компенсирующей. Уравновешивающий механизм работает следующим образом. Если исходное усилие F компенсирующей пружины задать равным F сг, где с - крэффициент пропорциональности, характеризующий жесткость пружины; г - длина кривошипа, т.е. сжать пружину на длину криворабочейшипа, а исходное усилие F Mmoi;( пружины задать равным где максимальная величина неуравновешенного момента, создаваемого- рычагом 4 с грузом Q, то в результате взаимодействия усилий пружин 9 и 10 с кривощипом 3 на оси вала 2 возникает момент X М , изменяющийся строго пропорционально синусу угла поворота оси, который полностью уравновесит момент М, создаваемый около этой оси неуравновешенной массой Q совместно с рычагом 4 и изменяющийся при повороте оси по тому же закону. В данном механизме амплитуда уравновешивающего момента max будет полностью определяться только исходным усилием F рабочей пружины (при оС. 90) в то время, как исходное усилие F компенсирунйцей пружины остается неизменным для всего диапазона амплитуд Mn,a)i Уравновешиваемых моментов. Таким образом, настройка и перенастройка уравновешивающего механизма является простой операцией. Так, например, при наличии в механизме винтовой пары, находящейся во взаимодействии с рабочей пружиной, вся настройка механизма заключается в постепенном изменении исходного усилия F, рабочей пружины за счет ее поджатия винтом до того момента, при котором момент , , создаваемый рычагом 4 с неуравновешенной массой Q, будет полностью уравновешен моментом, создаваемым усилием F рабочей пружины. Предлагаемый уравновешивающий механизм позволяет кроме увеличения точности уравновептвания существенно упростить конструкцию и процесс перенастройки механизма (без замены деталей).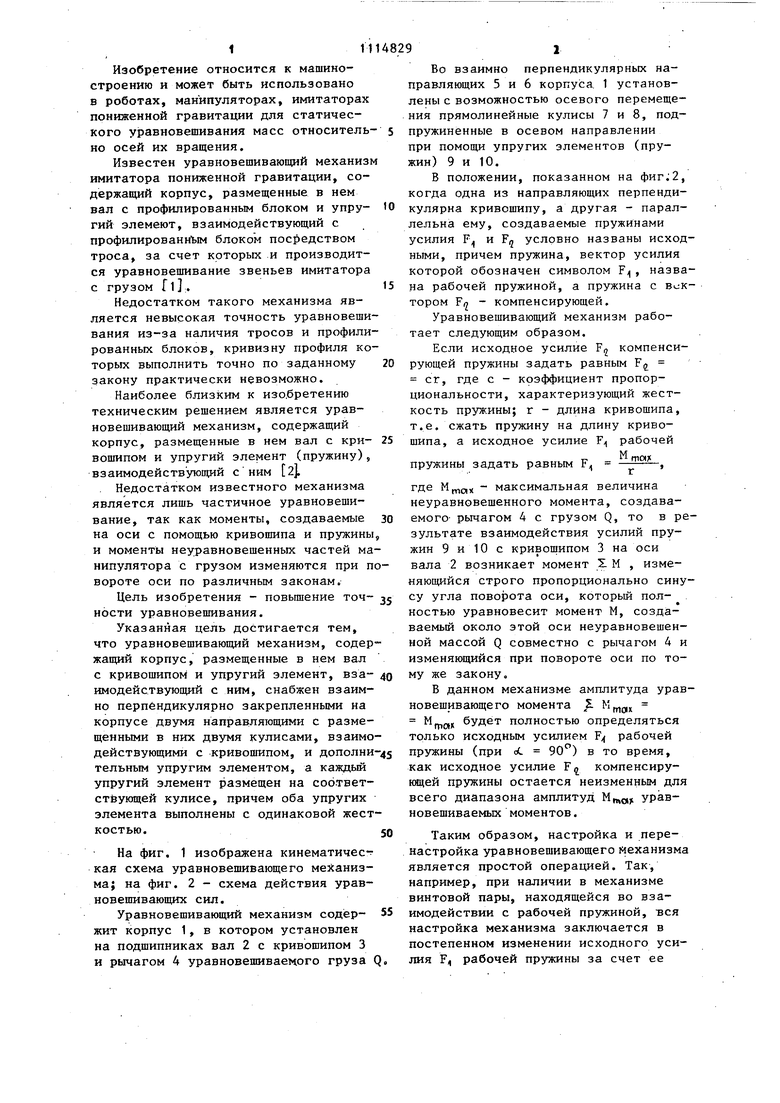
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1085804A1 |
| ВИБРОВОЗБУДИТЕЛЬ ИНЕРЦИОННОГО ДВИЖИТЕЛЯ | 1992 |
|
RU2026504C1 |
| ВИБРОВОЗБУДИТЕЛЬ ИНЕРЦИОННОГО ДВИЖИТЕЛЯ | 1991 |
|
RU2027069C1 |
| Устройство для уравновешивания движущейся массы | 1975 |
|
SU648766A1 |
| Механизм возвратно-поступательного движения с уравновешиванием сил инерции | 1977 |
|
SU771387A1 |
| Уравновешенный манипулятор | 1988 |
|
SU1521579A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕВЕРСИВНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2004 |
|
RU2267857C2 |
| Механизм уравновешивания поворотного рычага | 1977 |
|
SU616476A1 |
| Устройство для уравновешивания механизмов подъема | 1982 |
|
SU1022940A1 |
| Механический лобзик | 1982 |
|
SU1025507A1 |
УРАВНОВЕШИВАЮЩИЙ МЕХАНИЗМ, содержащий корпус, размещенные в нем вал с кривошипом и упругий элемент, взаимодействующий с ним, отличающийся тем, что, с целью увеличения точности уравновещивания, он снабжен двумя взаимно перпендикулярно закрепленными на корпусе направляющими с размещенными в них двумя кулисами, взаимодействующими с кривошипом, и дополнительным упругим элементом, а каждый упругий элемент размещен на соответствующей кулисе, причем оба упругих элемента вьтолнены с одинаковой жесткостью. (Л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Крайнев А.Ф | |||
| Словарь-справочник по механизмам | |||
| М., Машиностроение, 1981, с | |||
| Счетная бухгалтерская линейка | 1922 |
|
SU386A1 |
| в, г, вид П | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Изё | |||
| высш.учеб, заведений | |||
| Машиностроение, 1978, № 4, с | |||
| Контрольный стрелочный замок | 1920 |
|
SU71A1 |
