у////////////////
1Д3
Изобретение относится к, машиностроению к может быть использовано в различных робототехнологических системах.
Цель изобретения - повьшение надежности работы устройства за счет уменьшения числа, подвижньж. элементов,
На чертеже схематически представлено предлагаемое устройство, .
Механизм уравновешивания манипулятора состоит из неподвижной колонны 1, ;неподвижного звена 2. поворотного I звена 3; закрепленного относительно и еподв1-ганого звена 2 посредством оси 4, дополнительного рычага 5, жестко закрепленного на поворотном звене 3, криволинейного паза 6, выиолне-нного на рычаге 5, Ролик 7 установлен в па-- зу 6, шарнирно соединен с пружиной 8, которая шарнирно соединена с неподвиж ным звеном 2,
Механизм уравновешивания манипулятора работает следующим образом.
При повороте поворотного звена 3 от привода вращения (на схеме не указан) оно отклоняется от вертикального положения на некоторый угол (положеМеханизм уравновешивания манипуля тора, содержащий неподвижное и поворотное звенья, прухгии, шарнирно закрепленную на одном из них и кинема- тг чески связанную с я соым звеном,, а также ролик, о т л и ч а ю щ и й- с я тем, что, с целью повышения на деж1юсти работы за счет уменьшения числа подвижных элементов, на втором звене выполнен криволинейный паз, а ролик расположен в-этом пазу и шарнир ко соединен с пружиной, при
нке, обозначенное на схеме пунктиром)
При этом возникает статический моменТаЗО профиль криволинейного паза опреде1
-1
f 2
С - жесткость пружины;
расстояние от оси поворота поворотного звена до точки закрепления пружины; расстояние от центра ролика, находящегося в криволинейном пазу, до оси поворота поворотного рьтага;
e-sinq
--arctgY------- - ° между горизонталью и текущим положением оси пружины.
Формула изобретения
Механизм уравновешивания манипулятора, содержащий неподвижное и поворотное звенья, прухгии, шарнирно закрепленную на одном из них и кинема- тг чески связанную с я соым звеном,, а также ролик, о т л и ч а ю щ и й- с я тем, что, с целью повышения на деж1юсти работы за счет уменьшения числа подвижных элементов, на втором звене выполнен криволинейный паз, а ролик расположен в-этом пазу и шарнир ко соединен с пружиной, при 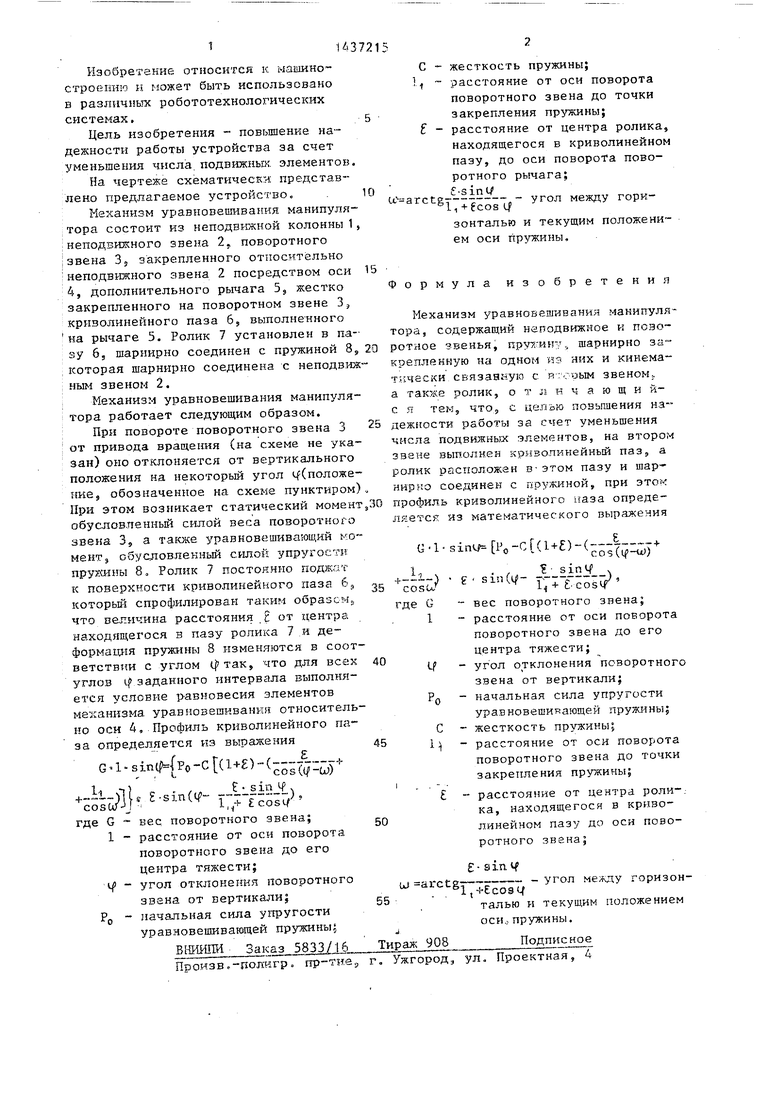
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм уравновешивания промышленного робота | 1987 |
|
SU1445947A1 |
| Уравновешенный манипулятор | 1988 |
|
SU1567370A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2356725C1 |
| Устройство для уравновешивания механизмов подъема | 1982 |
|
SU1022940A1 |
| СИСТЕМА АДАПТИВНОЙ КОМПЕНСАЦИИ ПРОМЫШЛЕННОГО РОБОТА | 2022 |
|
RU2785422C1 |
| Манипулятор | 1988 |
|
SU1602728A2 |
| СТАНОК ДЛЯ ОБРУБКИ, КЛЕПКИ, ТРАМБОВКИ | 2009 |
|
RU2412783C1 |
| Уравновешенный манипулятор | 1988 |
|
SU1521579A1 |
| Пружинный механизм | 1980 |
|
SU932005A1 |
обусловленньй силой веса поворотного звена 3j а также уравновешивающий момент, обусловленный силой упругости: пружшны 8, Ролик 7 постоянно поджат к поверхности криволинейного паза б,, которьш спрофилирован таким образом,, что величина расстояния.с от центра находящегося в пазу ропика 7 .и деформация 8 изменяются в соответствии с углом (так, что для всек углов If заданного интервапа выполняется условие р-авновесия элементов механизма уравновешивания относительно оси А, Профиль криволинейного паза определяется из выражения
.,.. .,.
cos(tf-U)
li -Т) с, . / , Е S in Ч , ч---)Н h-sinttf- г----),
COSW-J -1,(
где G
G l-sin(f(pp-С () (- E
вес поворотного эвена; 1 - расстоятше от оси поворота
поворотного звена до его
центра тяжести; ч - угол отклонения поворотного
звена от вертикалиj Рр - начальная сила упругости
уравновешивающей пружины;
ВЙШПИ Заказ 5833/16
5
0
ляетсЕ из математического выражения
G.l.,-cr(U)-(---|- -.
cosu где G 1
г
5
0
e-sinC - IV TcosM
-вес поворотного звена;
-расстояние от оси поворота поворотного звена до его центра тяжести;
-угол отклонения поворотного звена от вертикали;
-начальная сила упругости уравновешикающей пружины;
-жесткость пружины;
-расстояние от оси поворота поворотного звена до точки закрепления пружины;
- расстояние от центра роли-: ка, находящегося в криволинейном пазу до оси поворотного звана;
0
С
м
- угол между горизон S in Ч ы arctgY - -™талью и текущим положением
оси.; пружины,
J
Подписное
55
Тираж 908
| Механизм уравновешивания манипулятора | 1982 |
|
SU1049245A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
