//////А//////////.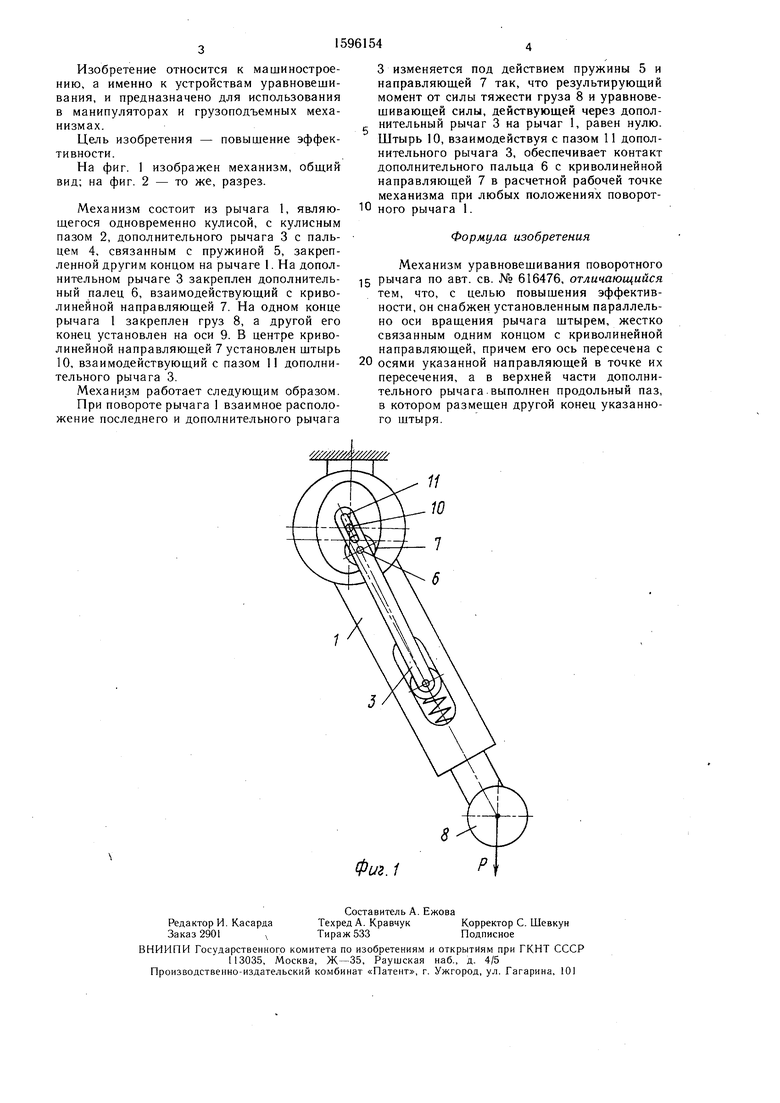
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм уравновешивания поворотного рычага | 1977 |
|
SU616476A1 |
| МЕХАНИЗМ УРАВНОВЕШИВАНИЯ ПОВОРОТНОГО РЫЧАГА | 1973 |
|
SU369096A1 |
| Механизм подъема стрелы манипулятора | 2018 |
|
RU2682866C1 |
| Устройство для уравновешивания механизмов подъема | 1982 |
|
SU1022940A1 |
| Подъемно-опускная секция рольганга | 1983 |
|
SU1113347A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Ограничитель грузоподъемности погрузчика-манипулятора | 1983 |
|
SU1102766A2 |
| Автоматический захват | 1983 |
|
SU1174366A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ РАССТРОПОВКИ ГРУЗА | 2003 |
|
RU2267456C2 |
| Привод грузоподъемного механизма | 1978 |
|
SU787343A1 |
Изобретение относится к машиностроению и предназначено для использования в манипуляторах и грузоподъемных механизмах. Новым в изобретении является то, что в механизме уравновешивания поворотного рычага в центре криволинейной направляющей 7 установлен палец 10, взаимодействующий с пазом 11, выполненным на дополнительном рычаге 3. 2 ил.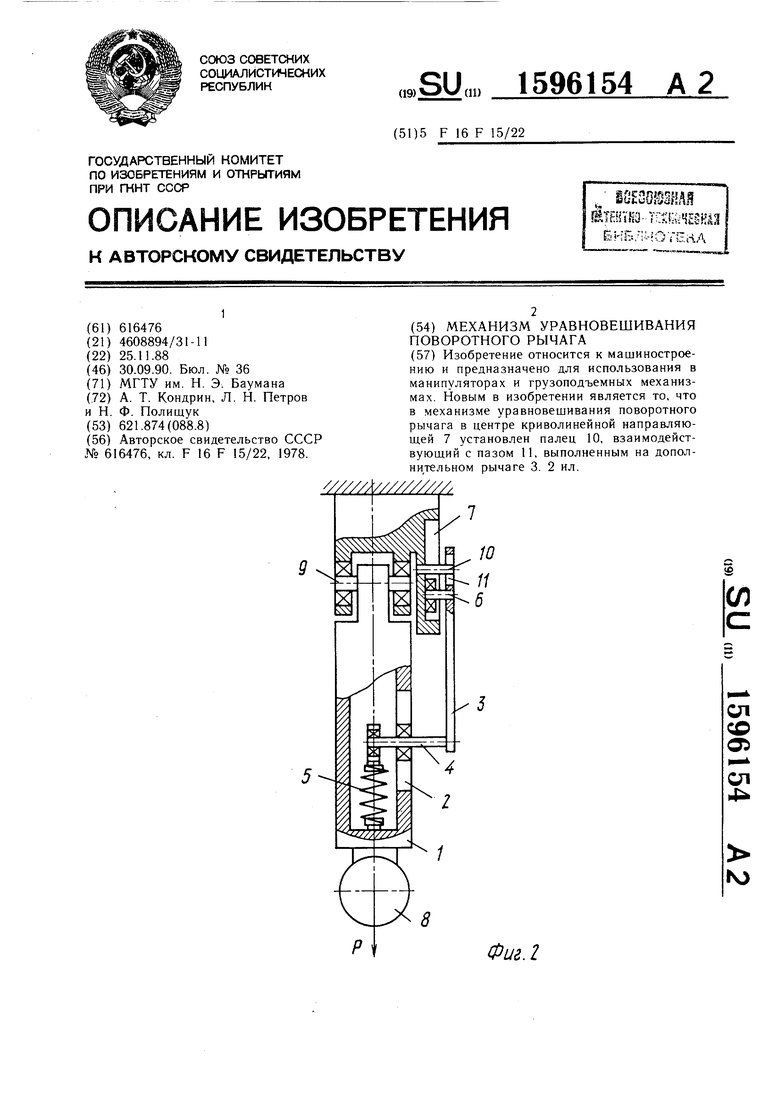
(Л
5
ел
;о
05
СП
4
К
Р V
Фцг.2
Изобретение относится к машиностроению, а именно к устройствам уравновешивания, и предназначено для использования в манипуляторах и грузоподъемных механизмах.
Цель изобретения - повышение эффективности.
На фиг. 1 изображен механизм, обший вид; на фиг. 2 - то же, разрез.
Механизм состоит из рычага 1, являющегося одновременно кулисой, с кулисным пазом 2, дополнительного рычага 3 с пальцем 4, связанным с пружиной 5, закрепленной другим концом на рычаге I. На дополнительном рычаге 3 закреплен дополнительный палец 6, взаимодействующий с криволинейной направляющей 7. На одном конце рычага 1 закреплен груз 8, а другой его конец установлен на оси 9. В центре криволинейной направляющей 7 установлен щтырь 10, взаимодействующий с пазом II дополнительного рычага 3.
Механизм работает следующим образом.
При повороте рычага 1 взаимное расположение последнего и дополнительного рычага
3 изменяется под действием пружины 5 и направляющей 7 так, что результирующий момент от силы тяжести груза 8 и уравновешивающей силы, действующей через дополнительный рычаг 3 на рычаг 1, равен нулю. Штырь 10, взаимодействуя с пазом 11 дополнительного рычага 3, обеспечивает контакт дополнительного пальца 6 с криволинейной направляющей 7 в расчетной рабочей точке механизма при любых положениях поворот- ного рычага 1.
Формула изобретения
Механизм уравновешивания поворотного рычага по авт. св. № 616476, отличающийся тем, что, с целью повышения эффективности, он снабжен установленным параллельно оси вращения рычага штырем, жестко связанным одним концом с криволинейной направляющей, причем его ось пересечена с осями указанной направляющей в точке их пересечения, а в верхней части дополнительного рычага выполнен продольный паз, в котором размещен другой конец указанного штыря.
Фиг.1
Р
| Механизм уравновешивания поворотного рычага | 1977 |
|
SU616476A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
