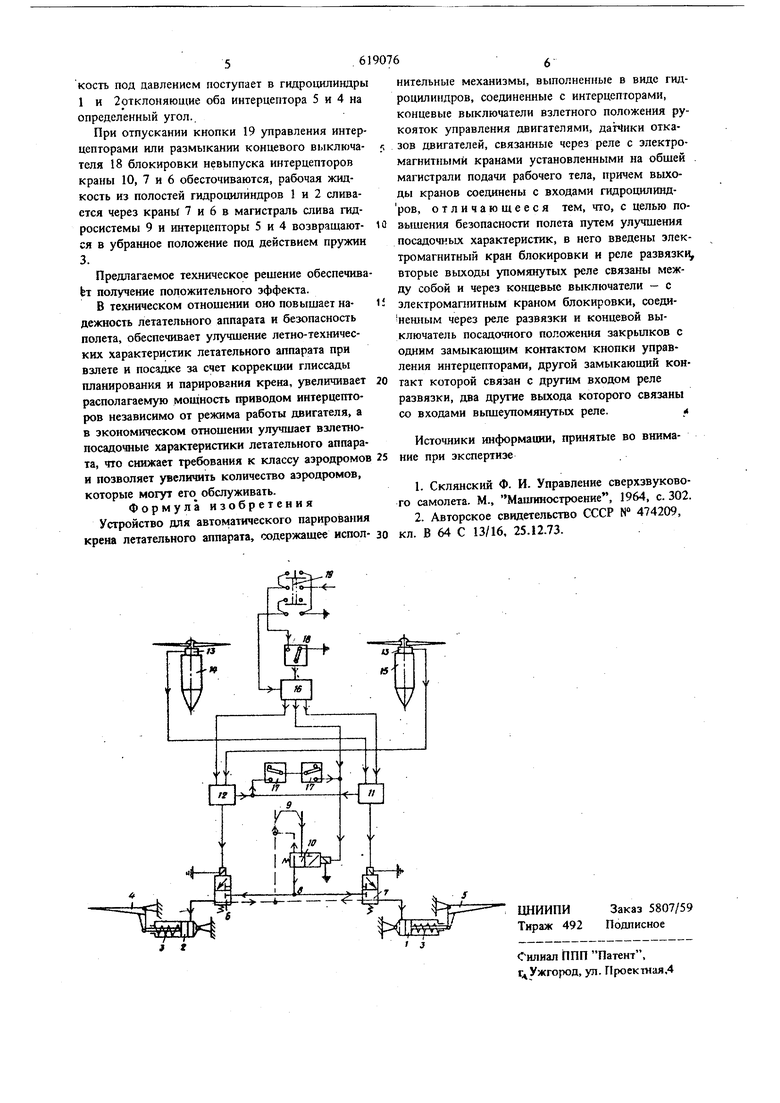
ТТзобретенне относится к области авиадаонной техники, в частности к системам управлени и управляющим устройствам летательных аппа ратов, и может быть применено для автоматического парирования крена нри отказе двигателя и для коррекции глиссады планирования летательного аппарата. Известны автоматы скольжения и автоматы , компенсации отказа двигателя, которые вследствие большого быстродействия успевают откло нять руль направления и злероны в нужную сто рону для парирования скольжения и возникающего крена. Эти устройства обычно содержат: в автомате скольжения - датчик, реагирующий на изменение угла скольжения, а в автомате компенсации отказа двигателя - датчики, следящие за режимом работы двигателя, управляющие устройства (краны), исполнительные механизмы включающие источники энергии, приводы руля направления и элеронов 1. Однако эти устройства включены в систему управления рулем направления и элеронами. Вве |дение таких устройств разового действия в основные каналы управления усложняет систему управления и резко снижает ее надежность. Кроме того, наличие автономных источников энергии, обеспечивающих работу приводов руля направления и элеронов, и вспомогательного оборудовагшя, обеспечивающего работу источника энергии, снижает надежность работы самих устройств для парирования скольжения и возникающего крена. Такие устройства ввиду высокого быстродействия требуют больщих мощностей силовь1Х приводов и источников энергии, значительно превышающих потребные для основных каналов управления. В случае выхода из строя автономного источника энергии неизбежен отказ устройства. Для увеличения надежности работы таких устройств необходимо применять сложную схему дублирования, что ведет к усложнению всей системы управления и к увеличе1тю веса. Известно и другое устройство для автоматического парирования крена летательного аппарата, включающее в себя трубопроводы, соедашяющие через обратные клапаны полости за компрессорами левого и правого двигателей с общим трубопроводом. Общий трубопровод, через промежуточный механический пневмокран связаиныи с системой выпуска закрылков, подключен к злектропневмокранам, от которых трубопроводы ведут к пневмонилиндрам, приводящим в движение интерцепторы. В каждый из пневмопилиндров вмонтирована пружина, Датчики лево го и npajoro двигателей электроцепями соединены с реле, подключающими электропитание к обмоткам электропиевмокранов 2. Такое устройство имеет ограниченную мощрость пневмоцилиндров, зависящую от размеров цилиндров и определяемую минимальным режимом работы двигателя. В нем также невозможно одновременное управление обоими интерцепторами, например для коррекции глиссады планирования, что ухудшает летно-технические характеристики летательрюго аппарата. Цель изобретения - повьщ|ение безопасности полета путем улучшения посадочных характеристик летательного аппарата. Это достигается тем, что в устройство введены электромагнитный кран блокировки и реле развязки, при этом вторые выходы упомянутых реле связаны между собой и через концевые выключатели - с электромагнитным краном блокировки, соединенным через реле развя ки и концевой выключатель посадочного положе ния закрылков с одним замыкающим контактом кнопки управления интерцепторами, другой замыкающий контакт которой связан с другим входом реле развязки, два другие выхода которого связаны со входами вышеупомянутых ре ле. На чертеже изображена принципиальная схема устройства. Устройство для автоматического парирования крена летательного аппарата включает исполнительные механизмы, выполненные в виде гидроцилиндров 1 и 2 с вмонтированными в них пру жинами 3, шарнирно подсоединенные штоками к интерцепторам 4 и 5, а корпусами - к конструкции крыла летательного аппарата. Гидроцилиндры 1 и 2 подключены через элек тромагнитные краны 6 и 7 уборки-выпуска интерцепторов к общей магистрали 8 нодачи рабочей жидкости из гидросистемы 9 через электромагнитный кран 10 блокировки. Обмотки электромагнитных кранов 6 и 7 . уборки-вьшуска интерцепторов соединены электроцепями с реле 11 и 12, которые соединены электроцепями с датчиками 13 на левом и правом двигателях 14 и 15с реле 16 развязки эле трических цепей и через концевые выключатели 17 положения рукояток управления двигател ми - с обмоткой электромагнитного крана 10. Обмотка электромагнитного крана 10 соединена электроцепью с реле 16. Реле 16 соединено одной электроцепью через замыкаюишй контакт концевого выключателя 8 блокировки невыпуска интерцепторов, наример по положению закрылков, с одним заыкающим контактом кнопки 19 управления итерцепторами, а другой электроцепью без блоировки - с другим замыкающим контактом нопки 19. В режиме автомата парирования крена устойство работает следующим образом. При взлете концевые выключатели 17 полоения рукояток управления двигателями замыаются. В случае отказа левого двигателя 14 датчик 13, следящий за режимом работы двигателя, выает сигнал на реле 11. Реле 11 замыкает электроцепи, питающие обмотку электромагнитного крана 10 подачи рабочей жидкости из гидросистемы 9 в общую магистраль 8 и обмотку электромагнитного крана 7 уборки-Выпуска интерцептора 5. Краны 10 и 7 срабатывают. Рабочая жидкость под давлением поступает в гидроцилиндр 1, отклоняющий интерцептор 5 правого полукрыла, парируя возникший крен. В случае отказа правого двигателя 15 датчик 13, следящий за режимом работы этого двигателя, выдает сигнал на реле 12. Реле 12 замыкает электроцепи, питающие обмотку электромагнитного крана 10 подачи рабочей жидкости из гидросистемы 9 в общую магистраль 8 и обмотку электромагнитного крана 6 уборки-выпуска интерцептора 4. Краны 10 и 6 срабатывают. Рабочая жидкость под давлением поступает в гидроцилшщр 2, отклоняющий интерцептор 4 левого полукрыла, парируя возникший крен. Уборка интерцептора 4 или 5 осуществляется пружинами 3, при этом рабочая жидкость иэ полостей гидроцилиндров сливается через обесточенные краны 6 и 7 в магистраль слива гидросистемы 9. При размыкании хотя бы одного из концевых выключателей 17 кран 10 обесточивается, рабочая жидкость из общей магистрали 8 поступает в магистраль слива гидросистемы 9 и тот или другой интерцептор под действием пружин 3 возвращается в убранное положение. В режиме управления интерцепторами на планировании (изменение глиссады) устройство работает следующим образом. На посадке концевой выключатель 18 блокировки невыпуска интерцепторов, например по положению закрылков, замыкается. При нажатии кнопки 19 управления интерцепторами. электрическое питание поступает на обмотку реле 16. Реле 16 замыкает электроцепи, питающие обмотку электромагнитного крана 10, и одновременно через реле 11 и 12 - обмотки электромагнитных кранов 7 и 6, управляющих симметричными гидравлическими циливдрами I И 2. Краны 10, 7 и 6 срабатывают. Рабочая жид

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического парирования крена летательного аппарата | 1973 |
|
SU474209A1 |
| СИСТЕМА РУЛЕВЫХ ПРИВОДОВ ТРАНСПОРТНОГО САМОЛЕТА | 2016 |
|
RU2654654C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТА ПРИ ОТКАЗЕ ДВИГАТЕЛЯ | 2014 |
|
RU2562673C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| Способ управления самолётом в режиме системы автоматического управления "Посадка" | 2024 |
|
RU2830919C1 |
| СИСТЕМА УПРАВЛЕНИЯ АЭРОДИНАМИЧЕСКИМИ ПОВЕРХНОСТЯМИ САМОЛЕТА | 1996 |
|
RU2110445C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
