1
Изобретение предназначено для использования в области грузоподъемных машин.
Известен гидравлический грузоподъемный кран, содержа дий поворотную стойку с установленной на ней качающейся стрелой с гуськом и грузозахватным органом и С1едя дим механизмом гидравлического привода с клапаном JlJ
Недостатком крана является необйодимость ручного управления клапаном следящего механизма гидравлического 1тривода.
Целью изобретения является повышение уровня автоматизации производственного процесса путем запрограммированной электронной системы управления.
Эта цель достигается тем, что кран содержит электрические кодирующие устройства, регистрирующие и запоминающие взаимное расположение частей крана, а также блок сравнения, включенный между,запоминающим устройством и клапаном следящей систеки механизма гидравлического привода; причемс с целью регистрирования изменения угловых положений между частями крана электрические кодирующие устройства представляют собой потенциометры, а поворотная стойка вьшолнена с зубчато-реечной передачей, состоящей из двух реек, одна из которых соединена с гидравлическим приводом, а. другая - с потенциометром, и смонтированного на основании стойки зубчатого колеса, взаимодействующего с упомянутыми рейками кроме того, предусмотрено крепление качающейся стрелы на стойке посредством непово0ротной оси, на которой смонтирован потенциометр, ось которого снабжена рычагом с вилкой на его свободном конце, закрепленным на стойке без возможности вращения. В этом случае,
5 если качающаяся стрела закреплена на стойке посредством поворотной оси, ось потенциометра снабжена рычагом, свободный конец которого закреплен
0 на стойке без возможности вращения.
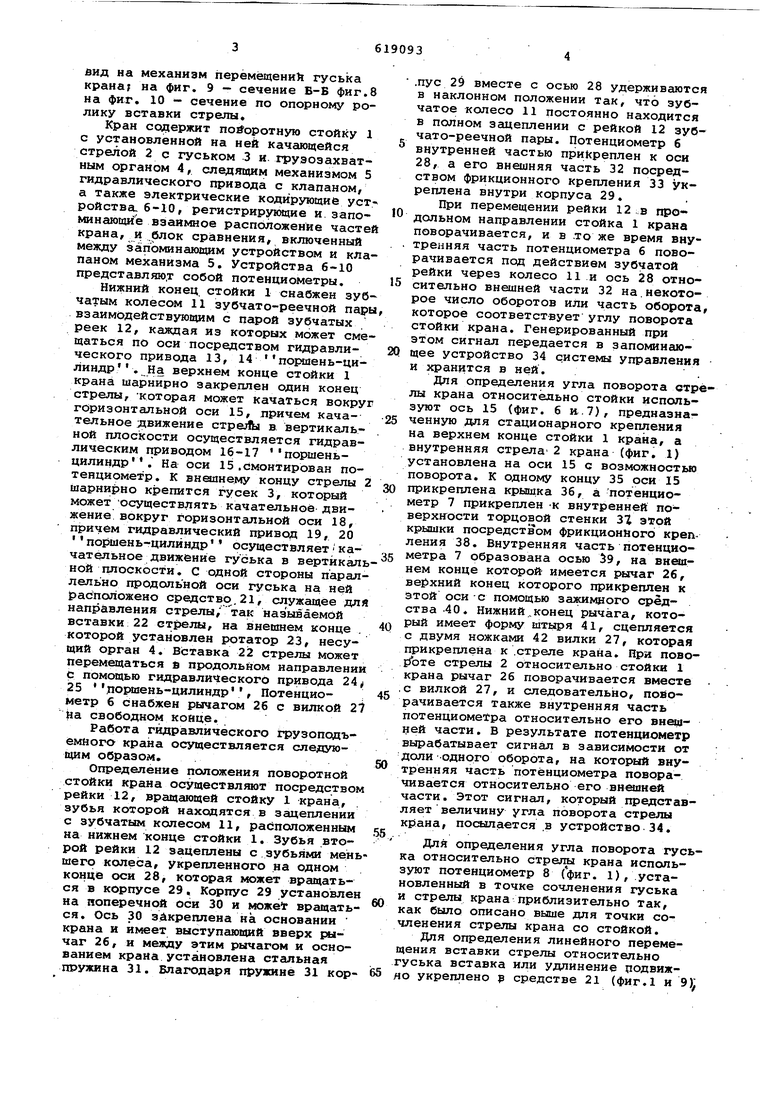
На фиг. 1 изображен кран, общий вид; на фиг. 2 - схема системы управления краном; на фиг. 3 - блоксхема системы управления краном; на
5 фиг, 4 - блок-схема системы управления одной движущейся частью крана; на фиг. 5 - вид на механизм поворота стойки крана; на фиг. б - вид на механизм качания стрелы крана; на фиг..7 - вид А фиг.6; на фиг. 8 дид на механизм перёмёщени) гуська крана; на фиг. 9 - сечение Б-Б фиг.8 на фиг, 10 - сечение по опорному ролику вставки стрелы. Кран содержит поворотную стойку 1 с установленной на ней качающейся стрелой 2 о гуськом 3 и, грузозахватным органом 4, следящим механизмом 5 гидравлического привода с клапаном, а также электрические кодирующие уст ройства. 6-10, регистрирующие и запоминающие взаимное расположение часте крана, и блок сравнения, включенный между запоминающим устройством и кла паном механизма 5, Устройства 6-10 представляю собой потенциометры. Нижний конец стойки 1 снабжен зуб чатым колесом 11 зубчато-реечной пар взаимодействующим с парой зубчатых реек 12, каждая из которых может сме щаться по оси посредством гидравлического привода 13, 14 поряиень-циНа верхнем конце стойки 1 линдр крана шарнирно закреплен один конец стрелы, -которая может качаться вокру горизонтальной оси 15, причем качательное движение cTpeJftj в вертикальной плоскости осуществляется гидравлическим приводом 16-17 поршеньНа оси 15.смонтирован поцилиндртенциометр. К внешнему концу стрелы шарнирно крепится гусек 3, который может -осуществлять качательное движение вокруг горизонтальной оси 18, причем гидравлический привод 19, 20 поршень-цилиндр осуществляеткачательное движение гуська в вертикал ной плоскости, С одной стороны парал лельно продольной оси гуська на ней расположено средство.21, служащее дл направления стрелы, так называемой вставки 22 стрелы, на внешнем конце которой установлен ротатор 23, несущий орган 4. Вставка 22 стрелы может перемещаться в продольном направлени с помсвдью гидравлического привода 24 25 доршень-цилиндр, Потенциометр 6 снабжен рычагом 26 с вилкой 2 На свободном конце. Работа гидравлического грузоподъёмного крана осуществляется следующим образом. Определение положения поворотной стойки крана осуществляют посредство рейки 12, вращающей стойку 1 крана, зубья которой находятся в зацеплении с зубчатым колесом 11, расположенным на нижнем конце стойки 1. Зубья второй рейки 12 зацеплены с зубьями мен шего колеса, укрепленного на одном конце оси 28, которая может вращаться в корпусе 29. Корпус 29 установле на поперечной оси 30 и може вращать ся. Ось 30 закреплена на основании крана и имеет выступающий вверх рычаг 26, и между этим рычагом и основанием крана установлена стальная пружина 31. Благодаря пружине 31 кор .пус 29 вместе с осью 28 удерживаются в наклонном положении так, что зубчатое колесо 11 постоянно находится в полном зацеплении с рейкой 12 зубчато-реечной пары. Потенциометр 6 внутренней частью прикреплен к оси 28, а его внешняя часть 32 посредством фрикционного крепления 33 укреплена внутри корпуса 29. При перемещении рейки 12:в продольном направлении стойка 1 крана поворачивается, и в .то же время внутренняя часть потенциометра 6 поворачивается под действием зубчатой рейки через колесо 11 и ось 28 относительно внешней части 32 на.некоторое число оборотов или часть оборота, которое соответствует углу поворота стойки крана. Генерированный при этом сигнал передается в запоминающее устройство 34 системы управления и хранится в ней. Для определения угла поворота стрелы крана относительно стойки используют ось 15 (фиг. 6 Н.7), предназначенную для стационарного крепления на верхнем конце стойки 1 крана, а внутренняя стрела-2 крана (фиг, 1) установлена на оси 15 с возможностью поворота. К одному концу 35 оси 15 прикреплена крышка 36, а потенциометр 7 прикреплен К внутренней поверхности торцовой стенки 3Z этой крышки посредством фрикционного крепления 38. Внутренняя часть потенциометра 7 образована осью 39, на внаннем конце которой имеется рычаг 26, верхний конец которого прикреплен к этой оси -с помощью зажиддаого средства 40. Нижний.конец рычага, который имеет форму штыря 41, сцепляется с двумя ножками 42 вилки 27, которая прикреплена к .стреле крана. При повоЕЙэте стрелы 2 относительно стойки 1 крана рычаг 26 поворачивается вместе ,с вилкой 27, и следовательно, пойорачивается также внутренняя часть потенциометра относительно его BHaijней части. В результате потенциометр вырабатывает сигнал в зависимости от доли одного otSopoTa, на который внутренняя часть потенциометра поворачивается относительно его внеиней части. Этот сигнал, который представляет величину угла поворота стрелы крана, посьшается .в устройство 34, Для определения угла поворота гуська относительно стреда крана используют потенциометр 8 (фиг. 1), установленный в точке сочленения гуська и стрелы крана приблизительно так, как было описано выше для точки сочленения стрелы крана со стойкой. Для определения линейного перемещения вставки стрелы относительно гуська вставка или удлинение подвижло укреплено р средстве 21 (фиг.1 и 9)
перемещается по опорному ролику 43 и снабжено в нижней части выступающей в продольном направлении зубчатой рейкой 44, взаимодействующей с зубчатым колесом 45, которое находится на внутренней части потенциометра 9. Фрикционное крепление 46 прикрепляет потенциометр 9 к рычагу 47, один конец которого перемещается в средстве 21 вокруг штыря 48, а противоположный конец 49 этого рычага снабжен отверстием 50, через которое проходит болт 51, закрепленный на средстве 211 Между концом 49 рычага и втулкой 52 закреплен болт 51, над головкой болт расположена стальная пружина 33, обеспечивающая постоянное полное зацепление зубьев колеса 45 с зубьями рейки 44. Ролик 43 вставки стрелы 22 снабжен периферийно расположенной канавкой 54 (фиг.10), которая обеспечивает зазор для зубчатой рейки 44, когда вставка 22 перемещается наружу (вправо в соответствии с фиг.8),.
При перемещении вставки 22 стрелы вдоль средства 21 внутренняя часть потенциометра 9 поворачивается на некоторое число оборотов (или часть оборота), которое соответствует линейному перемещению вставки. В результате вырабатывается сигнал, который соответствует этому перемещению. Сигнал хранится в устройстве 34.
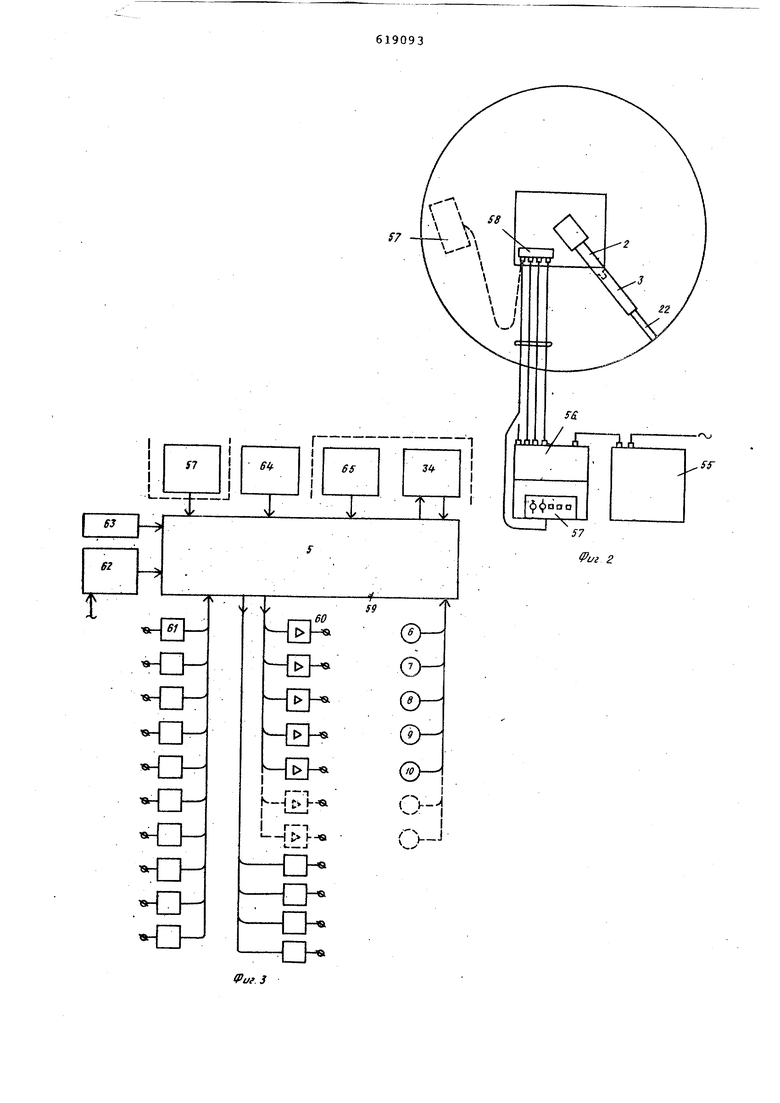
На фиг. 2 показаны насос 55 механизма гидравлического привода, подключенного к сети, блок 56 управления центральной системы, съемный блок управления 57, который, как показано штрих-пунктирной линией, может быть установлен повторно. Блок управления с помощью трубопроводов подсоединен к соединительной коробке 58 на каркасе крана.
На блок-схеме, показанной на фиг.З к центральному логическому блоку 59 подсоединены устройства 6-10, набор сервоусилителей 60 и некоторое ког личество бл-окирующих устройств €1, источник питания 62 и датчик температуры 63. К центральному блоку 59 подсоединены, кроме съемного блока управления 57 и устройства 34, также пульт привода 64 и пульт управления 65.
Сигналы, выработанные в устройствах 6-10 - сигналы аналогового типа в форме электрического напряжения. Поворот потенциометра совместно с, например, качательным движением стрелы 2 крана означает изменение потенциала рассматриваемого сигнала. Так 1как ансшоговые сигналы обрабатывать трудно, этот потенциальный сигнал преобразуется в системе управления в цифровые сигналы в аналого-цифровом преобразователе 66 (фиг. 4). Таким образом, сигнал, который ранее был аналоговым, преобразуется в комбинации цифровых величин О и 1. После окончания операции преобразования полученные цифровые сигналы могут обрабатываться в системе управления и в цифровом компараторе 67 они могут сравниваться Ссоответствующими сигналами, хранимыми в устройстве 34 (устройство записи на ленту). То есть разность величин сигналов в устройстве 34 и в потенциометре приводит к увеличению цифрового сигнала отклонения, который вновь преобразуется в цифро-аналоговом преобразователе 68 из цифровой
в аналоговую. Затем этот аналоговый сигнал используется, чтобы управлять (открывать) злектрогидравлический направленный клапан 69, который направляет среду под давлением
к цилиндру для осуществления движения; Эти операции сравнения и выдачи сигналов осуществляются с частотой приблизительно 25 раз в секунду. Цилиндр продолжает свою работу до тех пор,
пока связанный с ним потенциометр не выработает сигнал, который совпадает с сигналом устройства 34.
Общая схема соедиений, показанная на фиг. 4, иллюстрирует работу
одной из частей крана, например, гуська, 3. Те же принципы применимы и к работе других частей крана.
Формула изобретения
30
1.Гидравлический грузоподъемный кран, содержащий поворотную стойку с установленной на ней качающейся
стрелой с гуськом, с грузозахватным органом и следящим механизмом гидравлического привода с клапаном, отличающийся тем, что, с целью повышения уровня автоматизации
производственного процесса путем запрограммированной электронной системы управления, он содержит электрические кодирующие устройства, регистрирующие и запоминающие взаимное расположение частей крана, а также блок сравнения, включенный между запоминающим устройством и клапаном следящей системы механизма гидравлического привода.
2.Кран ПОП.1, отличающийся тем, что, с целью регистрирования изменения угловых положений между частями крана, электрические кодирующие устройства представляют собой потенциометры.
3.Кран по пп. 1, 2, о т л и чающийся тем, что поворотная
стойка выполнена с зубчато-реечной передачей, состоящей из двух реек, одна из которых соединена с гидравлическим приводом, а другая - с потенциометром, и смонтированного на основании стойки зубчатого колеса, взаимодействующего с упомянутыми .
4.Кран по пп. 1-3, о т л и чающийся, тем, что качающаяся стрела закреплена на стойке посредством нвповоротной оси, на которой смонтирован потенциометр.
5.Гидравлический кран по п.4,
о т ли ч ающ ий с я тем, что ось потенциометра снабжена рычагом с вилкой на го свободном конце, закрепленным на стойке без возможности вращения.
6. Кран попп. 1, 2, отличающийся тем, что качающаяся стрела закреплена на стойке посредством поворотной оси, на конце которой смонтирован потенциометр, ось которого снабжена рычагом, свободный конец -которого закреплен на стойке без возможности вращения.
Источники информации, принятые во внимание при экспертизе:
1. Патент ФРГ 1634922, кл. 84 3) 9/06, 1967.
57 Pi/i 2
.,,Г
I. . H TdfilH
м
69

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ видеосъемки и система для его реализации | 2019 |
|
RU2705102C1 |
| Манипулятор | 1972 |
|
SU446411A2 |
| ЗУБОРЕЗНЫЙ СТАНОК ДЛЯ ОБРАБОТКИ КОНИЧЕСКИХ КОЛЕС | 1966 |
|
SU222853A1 |
| ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ ДЛЯ КРАНОВ С ТЕЛЕСКОПИЧЕСКОЙ СТРЕЛОЙ | 1991 |
|
RU2025452C1 |
| СТРЕЛОВОЙ ПОДЪЕЛ1НЫЙ КРАН | 1972 |
|
SU424803A1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫЛЕТА В УСТРОЙСТВЕ БЕЗОПАСНОСТИ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271986C2 |
| АВТОМОБИЛЬНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684838C1 |
| Машина для взъерошивания края верха обувной заготовки | 1976 |
|
SU1223829A3 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ (ВАРИАНТЫ) | 2006 |
|
RU2322382C1 |
| СУДНО, ПИТАЕМОЕ И ДВИЖИМОЕ ЭНЕРГИЕЙ КАЧКИ СВОЕГО КОРПУСА | 2006 |
|
RU2365520C2 |



3f 36 7 И / / /
ipuf.s:
27 г
1г
П/
-2S
зг
//
.//
39
Buff A
42
/
f2
S-S
j-5 Ч Ч Ч
ч
х
12
ч
Ч Ч Ч Ч Ч
«4
ч
///////////////A
ч ч ч
iPuf. Iff
