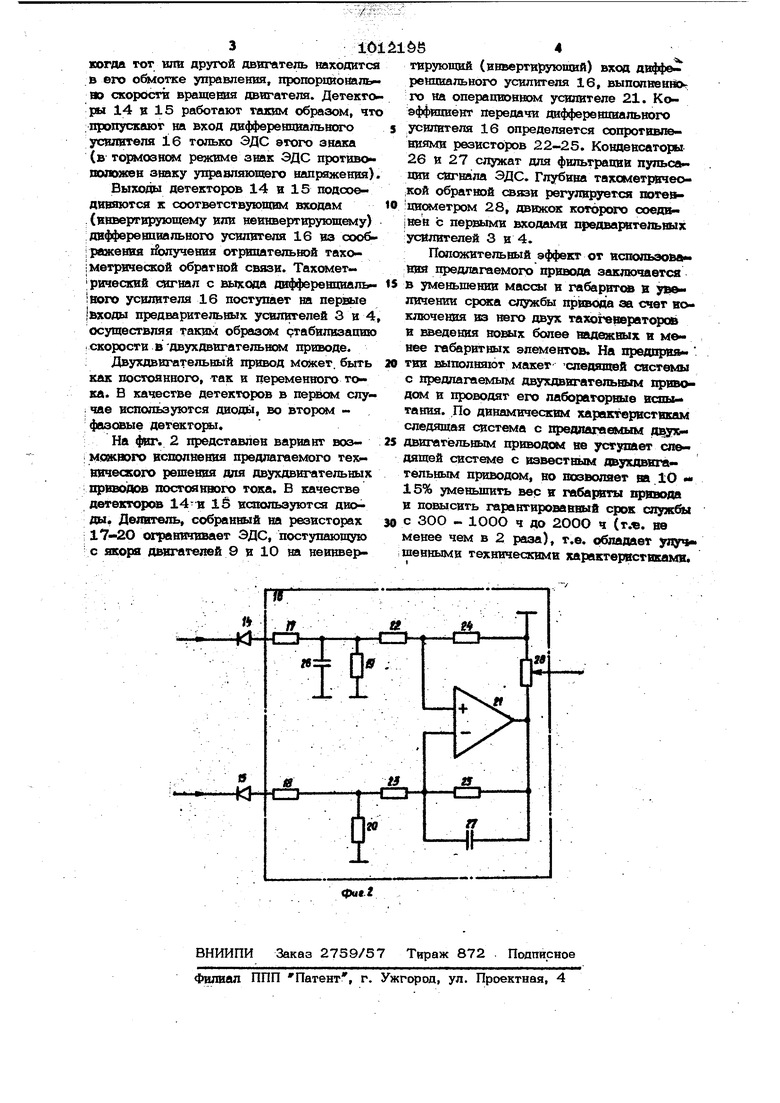
1 Изобретение относится к гштоматичео кому управлению и может быть испопьзова но в следящих системах. Известен двухдвигательный привод, содержащий два канала управления, каде|Аый из которых содержит усилитель, двигатель, тахоз енератор, редуктор, соединенный с нагрузкой. Каждый вз каналов содержит также источник опорного сигнала с целью создания на двигателях противоположных Моментов, yMeHblna ющих влияние люфта редуктора . Недостатком привода является испопь зование в качестве датчиков скорости тахог«нерато1Х)В, уввличиваювппс вес и габариты приводов. . Наиболее близким по технической суи ности к изобретению является двухдвигательный привод, содержащий два идентичных канала управления, каждый из которых содержит предварительный усилитель, детектор, усилитель мовдвости, двигатель и редуктор, соединенный последовательно, и тахогевератор, вход которого соединен с выходом двигателя, а выход - с первым предвар тельного усилителя. При этом вториле входы предварительных усилителей объединены и являются входом устройства. Выходы редукторов также объединены и связаны с нагрузкой 21. Недостатком данного двухдвигатепьного привода является использование в качестве датчиков скорости тахогенераторо что приводит к увеличению массы и габа ритов и снижению срока службы привода. Цель изобретения .- уменьшение мао. сы и габаритов привода и повышение надежности. Поставленная цель достигается тем, что двухдвигательный привод, содержащий два идентичных канала управления, каждый из которых содержит последовательно соединенные предварительный усил№тель, детектор, усилитель мощности4 дв гатель и редуктор, а также нагрузку, соединенную с выходами редукторов первого и второго каналов управления, при этом первые входы предварительных усилителей объединены и являются входом ррЕвода:, привод дополнитепьйо снабжен двумя детекторами, входы которых соедо йены с выходами усилителей мощности, а выход- с входами дифференциального усилителя, выход которого соединен с вторыми входами предварительных усилв телей. На фиг. 1 представлена структурная схема двухдвшгательного привода; на &S2 фиг. 2 - вариант испойвевия для двух- двигательного привода постоянного тока. Двухдвигательный привод состоит, из двух идентичных каналов 1 и 2, каждый вз который содержит последовательно соединенные предварительные усилители 3 и 4, детекторы 5 и 6, усилители моли вости 7 и 8, :.двигатели 9 и 10, редукторы 11 и 12, выходы которых объединевы и связаны с нагрузкой 13, детекторы 14 и 15 и дифференциальный усил№тель 16. Входы детекторов 14 и 15 соединены с выходами усилителей мочь-. ности 9 и Ю соответственно. Выходы детекторов 14 и 15 соедине{зы с первым и вторым входами дифференциального усилителя 16 соответственно. .Выход дифференциального усилителя 16 соединен с первыми входами предварительных усилителей 3 и 4. Двухдвигательный привод работает следующим образом. Двигатели 9 и 10 через редукторы 11 и 12 приводят в движение исполнительный вал, соединенный с нагрузкой 13. Вращая вал в прямом направлении, двигатель 9 развивает вращающий момеит, определяемый величиной сигнала управления f При этом двигатель 1О работает в генераторвом режиме, с тормозным мслдентом, составляющим 10% toT номинального момента. При вращении вала в противоположном направлении характер создаваемых моментов обратный, т.е. один из двигателей работает в генераторном режиме, создавая тормозной момент, а другой - в двигательном.создавая вращающий мсшент и приводя нагрузку 13 во вращение. Как и в прототипе тормозной момент приводит к уменьшению динамической ощибки, обуслов юнной влиянием люфта, в зубчатых передачах. Величина тормозного момента определяется опорными сигналами U Q, и О on подаваемыми на вторые входы усилителей мощности 7 н 8. Согласование знаков моментов двигателей при и обратном направлении вращения исполнительного вала с полярностью управляющего сигнала осуществляется детекторами 5 н 6, Для коррекции следящих систем Q предлагаемым двухдвигателышм приводом используются отрицательные обратные связи по скорости, реалвзуемые вновь введенными блоками. При этом в Ka4eciw ве датчика скорости используются двигатели 9 н 10 поочередао в тот момент. КОГДА ТОТ ИЛИ другой дв пгатель находится в его управленЕя, пропоршоцаль- ш скорости вращения двигателя. Детекто ры 14 в 15 работают таким образом, что пропускают иа вход дифферешшальиого усилителя 16 только ЭДС этого знака (в тормозисяи знак ЭДС противо положен знаку управляющего напряжения). Выхода детекторов 14 и 15 подсоединяются к соответствующим входам X инвертирующему или веиивертирующему) :дифференпиального усилителя 16 из сообСражения {получения отршштелыюй тахо i метрической обратной связи. Тахомет- рический сигнал с выхсща дифферендиаль 1иого усилителя 16 поступает ш первые {Входы предварительных усилителей 3 и 4 осуществляя таким образом стабилизацию I скорости вдвухдвигательнс приводе. Двухдвигательный привод может, быть как постоянного, так и переменного тока. В качестве детекторов в первом слуi чае используются диоды, во вторс фазосые детекторы. На фиг. 2 представлен вариант возI Мооквого исполнения предлагаемого тех ввчесхого решения для двухдвигательных npBBoipK B постоя нвого тока. В качестве детекторов 14-в 15 используются диоды. Делитель, собранный на резисторах ; 17-2О ограничивает ЭДС, поступающую С якорв двигателей 9 и 10 на неинверW
А
(-p-j-CZb -(
т О-- I. , I
а
-&.
ts
гз
а
Hh тирующий (инвертирующий) вход дифферешгаального усилителя 16, выпопиенн Х го на операпионвся уснтштеле 21. Козффщшент передачи дифферешгаального усилителя 16 определяется сопротивлениями резисторов 22-25. Конденсаторы 26 И 27 служат для фильтрации пульсаПИИ сигнала ЭДС. Глубина тахометрвчео:Кой обратной связи регулируется потео :ш сяъ{етром 28, движок которого соедв1нен с первыми входами предварительных усилителей 3 и 4. Положительный эффект от исш льзова« ШЕЯ предлагаемого привода заключается в уменьшении массы и т баритов В ув&яичении службы привода за счет иоключения из него двух тахогевераторов и введешш новых более шшежных и менее габаритных элементов. На предпри тии выполняют макет следяоюй системы с предлагаемым двухдвигательным приводом и проводят его лабораторные испы- тания. По динамическим характеристикам спецящля система с зфедлагаемым ДВ5%двигательным приводом ие уступает следящей системе с известным двухдвигательным приводом, но позволяет ва 10 15% уменьщить вес в габариты привода и повысить гарантированный срок службы с ЗОО - 1ООО ч до 2ООО ч (т.в. ве менее чем в 2 раза), т.е. обладает улу шейными техническими характервствкамв.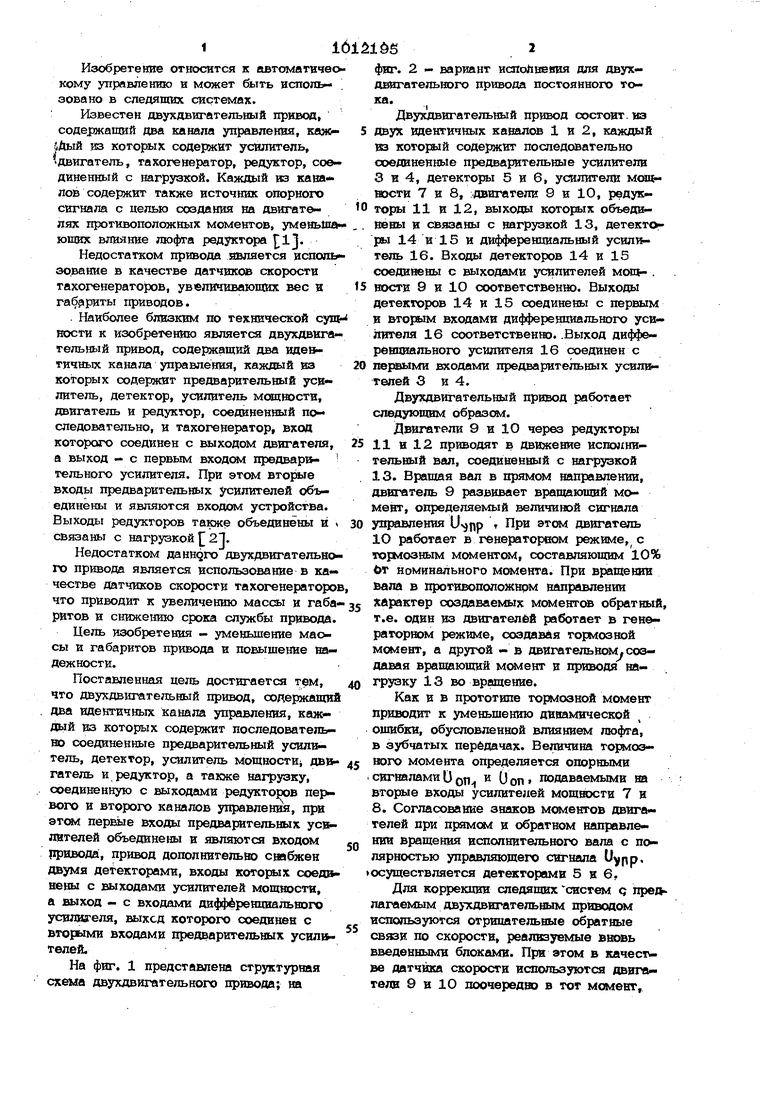
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для компенсации люфта в двухдвигательном приводе | 1978 |
|
SU746399A1 |
| Двухкоординатный следящий привод | 1989 |
|
SU1764029A1 |
| Устройство для управления двухдвигательным электроприводом | 1978 |
|
SU864477A1 |
| Двухдвигательная следящая система | 1980 |
|
SU901992A1 |
| Следящая система | 1986 |
|
SU1401436A2 |
| Следящая система | 1977 |
|
SU703776A1 |
| Следящая система с компенсацией лифта механической передачи | 1976 |
|
SU620940A1 |
| Электропривод перемещения механизма подачи станка | 1982 |
|
SU1115191A1 |
| ЭЛЕКТРИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2008 |
|
RU2392730C1 |
| Двухдвигательный следящий привод | 1977 |
|
SU650051A1 |
ДВУХДВИГАТЕЛЬНЫЙ ПРИВОД, содержащий два идентичных канала . управления, каждый из которых содержит последовательно ооединенеоые предварительный устпитель, детектор, усилитель мсштости, двигатель и редуктор, a также нагрузку, соедииеввую с выходами редукторов первого и втормч) каняэ лов управления, при этом irapBiiie входы предварительных усилителей о6ъе| 9ввы и являются входом привода, о т п в ч & ю m и и с я тем, что, с neimdo умевьшения массы и габаритов приводя и по вышения надежности, привод дошлвитепь но снабжен двумя детекторами, вхшы которых соеданены с вызшдами ус$ашт лей мощности, a выходы - с входамЕ дифференяиальвого усипителя, ко торого соединен с вторыми вхояамв прелварительных усилителей.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СВЧ-усилитель | 1986 |
|
SU1450078A1 |
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| АВТОМАТИЧЕСКОЕ ПРИСПОСОБЛЕНИЕ К РАЗМОТКАМ ДЛЯ ИЗМЕНЕНИЯ СКОРОСТИ НАМАТЫВАНИЯ ИЛИ СМАТЫВАНИЯ | 1925 |
|
SU3434A1 |
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
| Приспособление к индикатору для определения момента вспышки в двигателях | 1925 |
|
SU1969A1 |
