В известных приводах управления продольным суппортом токарного автомата используется барабан с переставными кулачками, взаимодействующими с роликом, укрепленным на суопорте. Недостатком известных приводов является то, что для изменения величины хода суппорта приходится сменять кулачки на барабане.
В предлагаемом, согласно изобретению, приводе этот недостаток устранен тем, что применен дополнительный ролик, укрепленный на одном плече рычага, « то время, как ролик для взаимодействия с суппортам помещен с возможностью перестановки на другом плече рычага.
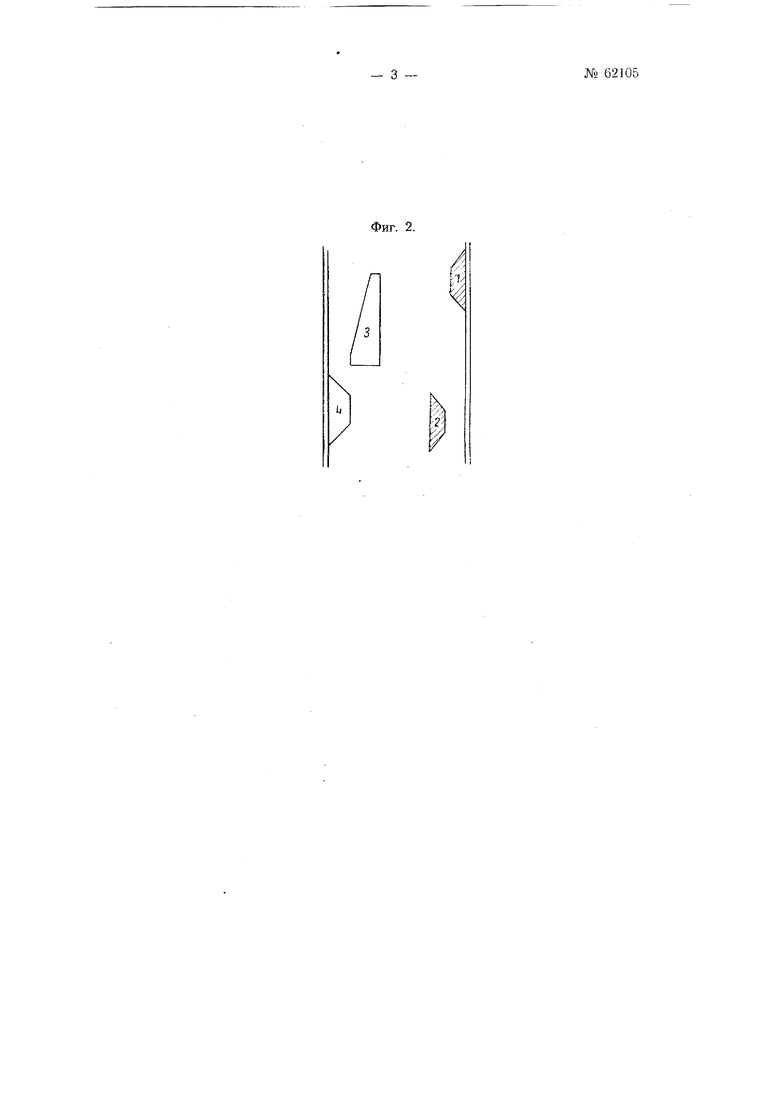
На фиг. I изображен предлагаемый привод в частичном разрезе; на фиг. 2 - расположение «улачков на боковой повфхности барабаиа.
Барабан А управления продольным суппортом токарного автомата несет на боковой поверхности две системы кулачков, воздействующих на суппорт с помощью двух роликов. Один из роликов, а именно ролик а как обычно, посажен на палец, жестко закрепленный в суппорте Б. Дополнительный ролик в укреплен на одном из плеч поворотного двуплечего рычага /С, другое плечо которого несет переставной вдоль плеча и закрепляемый винтом d ролик с входящий в паз суппорта Б. Нерестановкой ролика с изменяется -вжелательной мере величина перемещения суппорта Б, вс чедствие изменения расстояния ролика с от «си поворота рычага /С.
Как указывалось, «а барабане имеются две системы кулачков: У-2 и 3-4. Кулачки 1 т 2 служат для постоянного подвода и отвода суппарта действием на ролик а. Кулачок 3 слзжит для сообщения рабочего хода суппорту че|рез ролики в и с. Кулачок 4 служит для отвода суппорта на величину рабочего хода.
Работа механизма происходит следующим образом.
Вначале, когда ролик а двигается по кулачку /, совершается постоянный подход суппорта. Рычаг к с роликами 0и с в этот момент является ведомым.
После того, как ролик а пройдет весь подъем по кулачку / и ролик в станет против кулачка 3, начинается робочий ход суппорта.
После окончания рабочего хода, когда ролик в попадает на кулачок
4, цроисходит отход суппорта на величину рабочего хода. При окопчании работы «улачка 4, когда ролик а становится против кулачка 2, происходит отход суппорта «а постояппую величину.
Цри такой кинематической связи всей системы описанного привода начало рабочего хода про-исходит при любой его величине всегда с одного и того же места, вследствие чего отпадает надобность в перестановке кулачков вдоль оси барабана.
Предмет изобретения
Привод ущравлепия суппортом токарного автомата с использованием барабана кулачками, взаимодействующими с укрепленным на суппорте роликом для подвода и отвода суппорта, о т л и ча ю щ и и с я тем, что, с целью возможности изменения величины хода суппорта без смеиы кулачков барабана, применен дополнительный ролик в, укрепленный на одном плече рычага к, второе плечо которого несет передвижной ролик с для взаимодействия с cynnoipTOM.

| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОШПИНДЕЛЬНЫЙ АВТОМАТИЧЕСКИЙ ТОКАРНО-РЕВОЛЬВЕРНЫЙ СТАНОК | 1949 |
|
SU91305A1 |
| ОДНОШПИНДЕЛЬНЫЙ ТОКАРНЫЙ АВТОМАТ | 1935 |
|
SU50823A1 |
| Автоматический восьмишпиндельный токарный станок для прутковых работ с кулачковым управлением | 1959 |
|
SU133732A1 |
| Револьверный суппорт токарного автомата | 1986 |
|
SU1342610A1 |
| Токарный автомат | 1986 |
|
SU1355360A1 |
| ПРИВОД ПОДАЧИ СУППОРТОВ | 1971 |
|
SU308813A1 |
| Механизм подачи поперечных супортов токарно-револьверных станков и автоматов | 1950 |
|
SU87731A1 |
| ЗУБОДОЛБЕЖНЫЙ СТАНОК | 2011 |
|
RU2475341C2 |
| Кокономотальный автомат | 1947 |
|
SU113880A1 |
| Повозка с переставными рельсами | 1930 |
|
SU37500A1 |