(54) ПРОМЫШЛЕННЫЙ РОБОТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Цилиндр двигателя внутреннего сгорания | 1973 |
|
SU630443A1 |
| Ловитель | 1978 |
|
SU819032A2 |
| Статический смеситель | 1979 |
|
SU835480A1 |
| Промышленный робот | 1983 |
|
SU1127765A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Робототехнологический комплекс для сборки | 1990 |
|
SU1782203A3 |
| Промышленный робот с дискретным позиционированием | 1978 |
|
SU768631A1 |
| Промышленный робот | 1980 |
|
SU889418A1 |
| Ножевой цилиндр фальцаппарата | 1979 |
|
SU1014762A1 |
| ТЕХНОЛОГИЧЕСКИЙ ТРАНСПОРТ ЛИНИИ | 1990 |
|
RU2006356C1 |
Изоб р;ете|Н1ие тозетциоиных про1мышлен,ных (рЮбошоВ для сбо;р1ОЧ1ных, заГ|ру301Ч1НО-;р1а.ЗЛрузо1ЧЯЪ1х опарйций при О|бслуЖ)ИВа-нии техиолошнеского обо|руд10:ван1ия.
Известен щромышлениый рюбот, соде;ржанций .мвподвижяую стойку и имеханизмы подъема и .поворота Л.
Одн1ако этот робот имеет низкую точность И жесткость П1031ицио1Нвр|0|В|ания руки, а Т1а|Кже большой вес подвижных частей.
Предлагаемый промышленный робот отллч а-етая от из.в-еспнклго тем, что он снабжен пильзой и дополнительным motpnycoM, связанным с эл-емвнтом 1меха№изм.а иодъемл, «(Ншрим р со штоком 1аилов1ото цилинд рл, и несуш,1И1М -вилку, .а «пильза установлена оаа стойке с ВОЗМОЖНОСТЬЮ Вр ащвнйя вокруг ее СС1И, связали с элементам Miexa&HSMia поBcipOTia, 1Н1а|при,мер с 1выходюы;м в. IMOментного цилиндра, 1неп1одви.жн|0 установленного,на этой стойке, .и сна.бжена направляющей пл.а1нкой, вза1И1Модейст1вуЮ(Ш1ей с вилкой дополнительного-кар пуса.
Это о-беслечивает повышение точности и жестко1СТ и позип|ио1Н.ирова1ния руыи робота, а та«,Ж1е уменьшшие лодвижных масс.
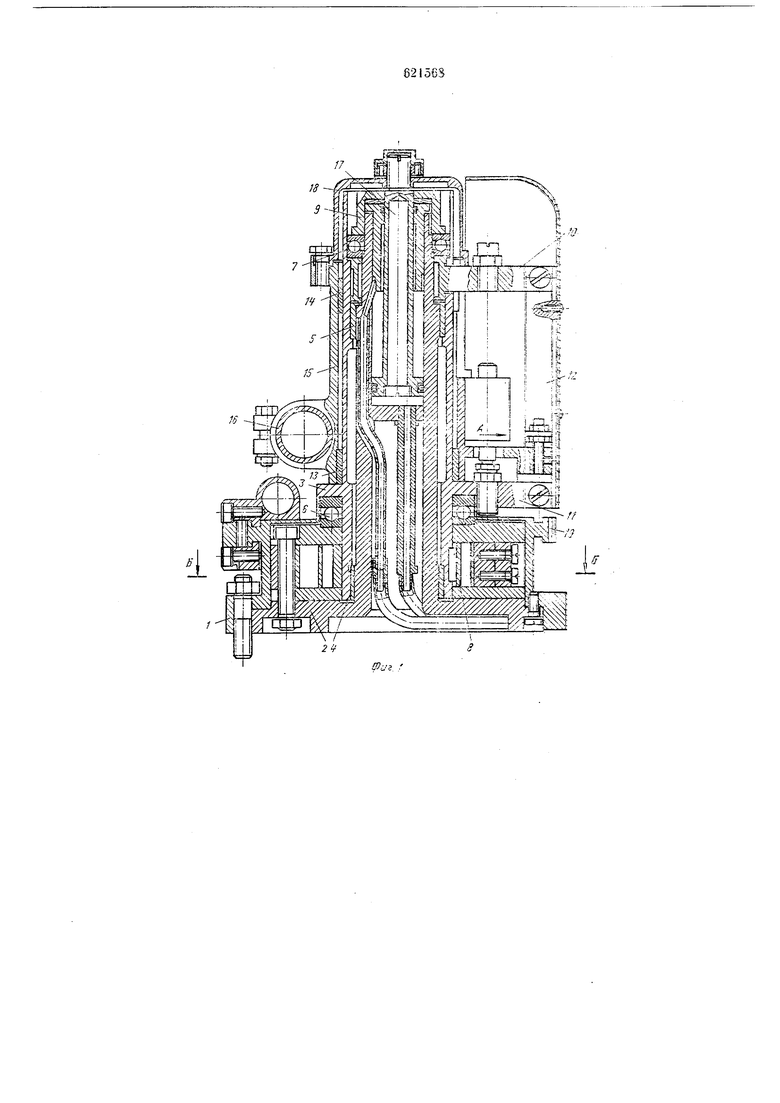
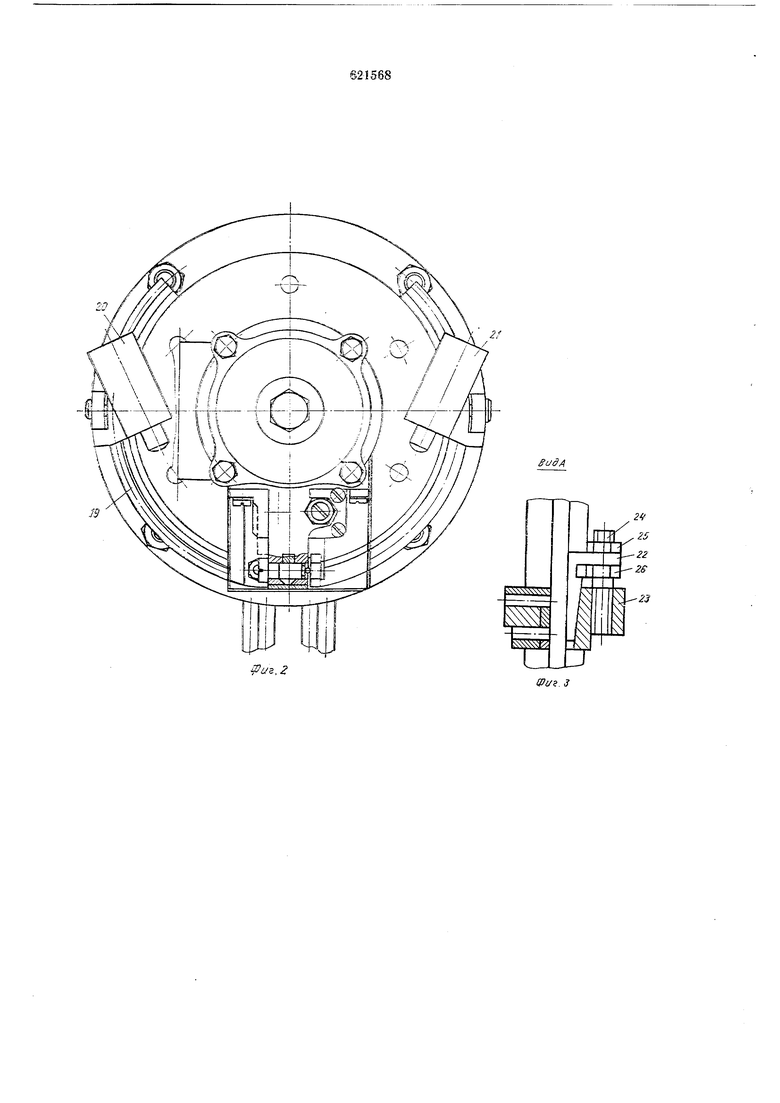
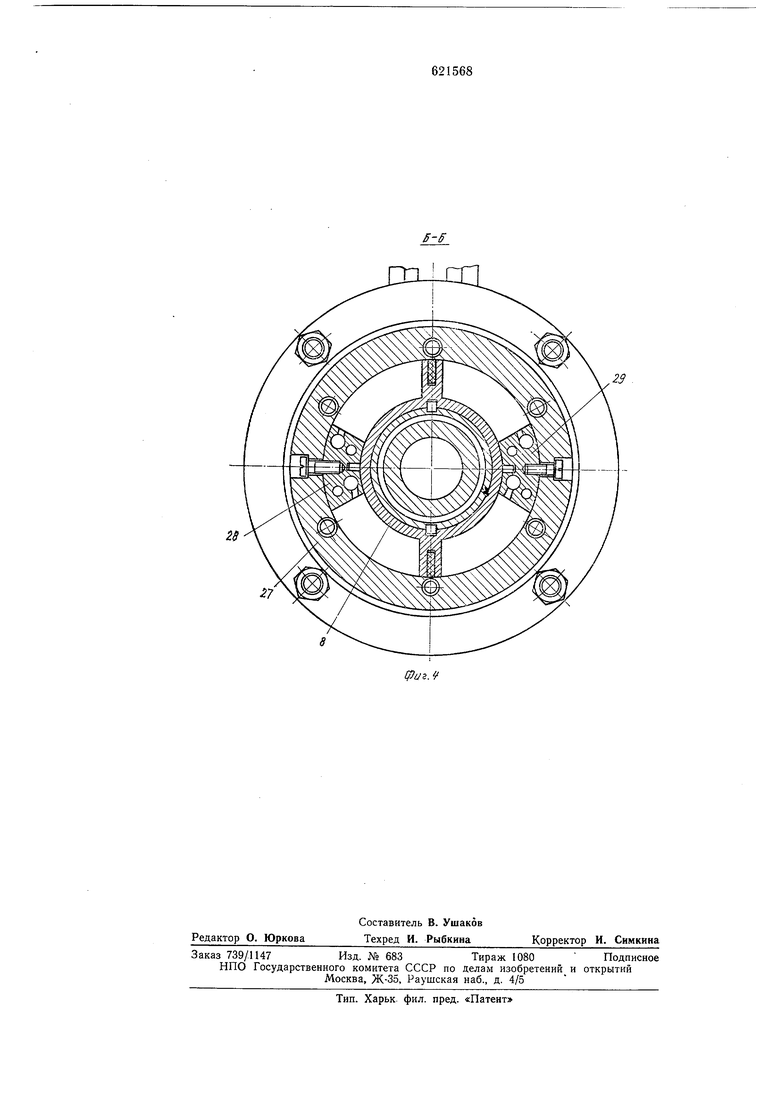
На -фит. 1 изображен лредлалаемый робот, В1арти1калыНЫЙ раз1р)ез; на фиг. 2 - то Же, щид cseipxy; Н:а фиг. 3 - вид по 1стрелие А ,на ф.И1г. 1 ((КЛИНОВИДНЫЙ механизм, выбирающий в соедкнении виьики дОПОЛ1нительгнОГО корпуса ,и Н)а|цр1авл:яющей пл.анки повсротиой гияьзы); на фиг. 4 - разрез по Б-Б на фиг. 1 (М-еханиз м поворота робота - моментного цил:И1Ндр1а).
.Промышленный робот содержит KOipnyc /, .соединенный со стойкой 2 В1инта;ми. На стойке 2 смонтировала inoBopOTiHia пильза 3 на бронзовых втулках 4 м 5 и упорных подuj:H;n;HHiKax 6 и 7. Нижняя часть П1оворот1ной гильзы соединена ,ш1полка.мис ротором 8 мо,мант,ного цилиндра, являющегося механизмом поворота. Гайка 9 ч-арез упорный лодшипНИк 7 зажимает кронштейн 10, з аложанный в |п,аз поворотной :пильзы 3 и базирующийся своими Цдалиндрическими шейками по инутренней по|ве(р.х1нюс11и эттой тильзы. На кронштейне 10 и поводке 11 поворотной пильзы жестко заираплэна Н1алр1а1вляющ аи пла1нка 12. На поворотной гильае 3 лри помощи б(ронзовых втулок /5 и 14 установлен допол1нительный корпус J5, Н1бсущий рук,у 16 робота. ДололлительНЫй корпус соединен :со штоком 17 силовО1ГО щилинд ра, являющегося .механизмом подъе.ма, через К:рыш1Ку 18. На корпусе робота iHiaipeSaiE зубчатый венац 19, -к которому крепятся упоры 20 и 21 с гидродамлфераади (см. фйг. 2). Клин 22 эаложен между стенкой таилки 23 дополнительного корпус.а 15 и лащравляющей планкой il2 i(OM. фиг. 3) и задреплея «а ,В:Илке 23 винтом 24 VL тлйками 25 п 26.
PiOTiQp 5 помещается в корпусе 27 (ам. фиг. 4). Через icyxaipiH 28 и 29 лодаетоя воздух в полосни (MiaMieBTiHoro цилиндра.
П-ромыщленный робот работает следующ)м -odtpasiOiM.
Воздух, ПЮСТупаЮЩИЙ в ЛОЛаСТИ аИ:ЛОВ 0,по цил.И1НД|р а, 1первмещ.а1ет |ЩТ1Ок 17, который че:рез иорышку 18 соободает вертикальное перемещение долоднительно.му корпусу 15, скользящему внулкавди 13 и 14 то пове(рх/HOiCTH П ОВ1о:рот1ной Пкльзы 3. При оодаче .-воздуха .В ссотйетствующ1ие полости моментного цилиндра ;ротар 8 noBiOpaHHBaeTicH IBO,«ipyr ,з:е|рт1И( ;0ои, ири этом шоворачив-ается соедмненлая щпогаками с IHIHM иоворотная гильз.а 3. Ушол noiBiOipoTia нойоро тной лильзы .а1Н1ИЧ1Ивается ynoipiaMH 20 и 21, за кр1епЛеин:Ы|М,и (на ванце 19 iKiOipayca /. .ПовоД01К 11 Н10В|С|рот1Н10й ;пильзы, упираясь в упоры 20 и 21, 10 Ста1Н1авл1И1ва1ет ее В крайних то-чках.
В. В ИЛ1ку 23 корпуса 15 заходит планка 12, 1чем П|р1едотв,ращ-а1етс1Я npOBOipiOT ко)рпуса 15 01Т1НО10ителыно тильзы 3. Зазор IB соед иН9ш и вялки 23 ;и ллааиад 12 вы би|р1аетоя клином 22 при помощи таек 25 и 26.
Блашодаря ,н:ово« компоноБже исполнительных :MiexaiHiH3iMOrB робота удается уменьшить 1подв ИЖ1Ные iMiaccbi, так как в iB-eipTiHхалыном ле|рвМещ:9НИ И заняты толыко дополнительный Kopiniyc с зак|репланной IB .вам ipyК1ай манипулятора, св-язаилый через крышку со ЩТОК01М подъемного механизма.
Зак)р©плвние (р1а1Вл.«ющ(ей плаими иа кроищтейне и поводке |П01ВО ротной гильзы в цределах raeaipiHTOB корпуса робюта, Обесгпеиивает уменьщение влияния зазор-а в соедииенни иилк1и дополнительнюго корпуса с
иан|ра;вл1Я Ющей ллаиюой на юеллчину углово:по лдрвМ1вщен1Ия едрпуса относительj;o поворотной шльзы.
Для повышения то.ч«10|С ли позищноиироБа1ни;я рО5ота зазор (В оаедииении иаправляющбй лл-аатки и аилии до полнительного
«арпуоа |ВЫ|б1И|раетоя клиновым 1мех1аниэмо;М.
TiaiK как lпoвqponнaя пильза iHie уч-аствует IB вертикальном ле|рем1ещвнии, Л|0ЯВ1Илась
воз1мож,Н|Ость рааполо;Ж1Ить упяры, oripiaMHЧ1ив;ающие угловое перемещ|0ние поворотной
пильзы, на неподвижном корпусе робапа.
Формула изобретения
п)токо:м юилового Цил1И1НДра ,и несущим .вилку, а .гильза уста1новлана иа стойке с воз.МОЖ)Н 0€тью вращения вокруг ее оси, СВЯ:зана с выход1ны,м валом моьментного щилиндра, неподвижно устаиовленно.по laa этой стойке,
н снабжена направляющей планкой, (Взаимодействующей с вилкой дополнительного корпуса.
Истонник информации, принятый во взимание при экоп р пизе:
17
3
