(5) ПРОМЫШЛЕННЫЙ РОБОТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Промышленный робот | 1983 |
|
SU1127765A1 |
| Автоматизированная технологическая единица | 1977 |
|
SU659375A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Манипулятор | 1981 |
|
SU1229031A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Манипулирующее устройство | 1985 |
|
SU1342722A1 |
| Промышленный робот | 1977 |
|
SU738864A1 |
| Робототехнический комплекс | 1987 |
|
SU1416244A1 |
1
Изобретение относится к автоматической загрузке деталей в технологическую машину и может быть использовано для поДачи несимметричной детали, находящейся в неориентированном положении, например в матрицу штампа или в приспособление обрабатываюи(ей или сборочной машины,
Известен промышленный робот, содер хащий две механические руки с захватами, приводы их линейного перемещения и приводы их поворота, выполненные, например, в виде моментных силовых цилиндров, причем корпус одного из которых связан с валом другого 1.
Недостатком известного устройства является сло : ность конструкции и oi- раниченность диапазона ориентируемых деталей.
Целью изобретения является расширение диапазона ориентируемых деталей.
Цель достигается тем, что рука робота расположена так, что одна шарнирно связана с корпусом указанного моментного цилиндра, а Другая - с его выходным валом, при этом 5 руки укреплены с возможностью качания вокруг оси, перпендикулярной оси указанных цилиндров, а рука, закрепленная на корпусе моментного цилиндра, снабжена дополнительным приво. дом линейного перемещения и приводом вращения этой руки.
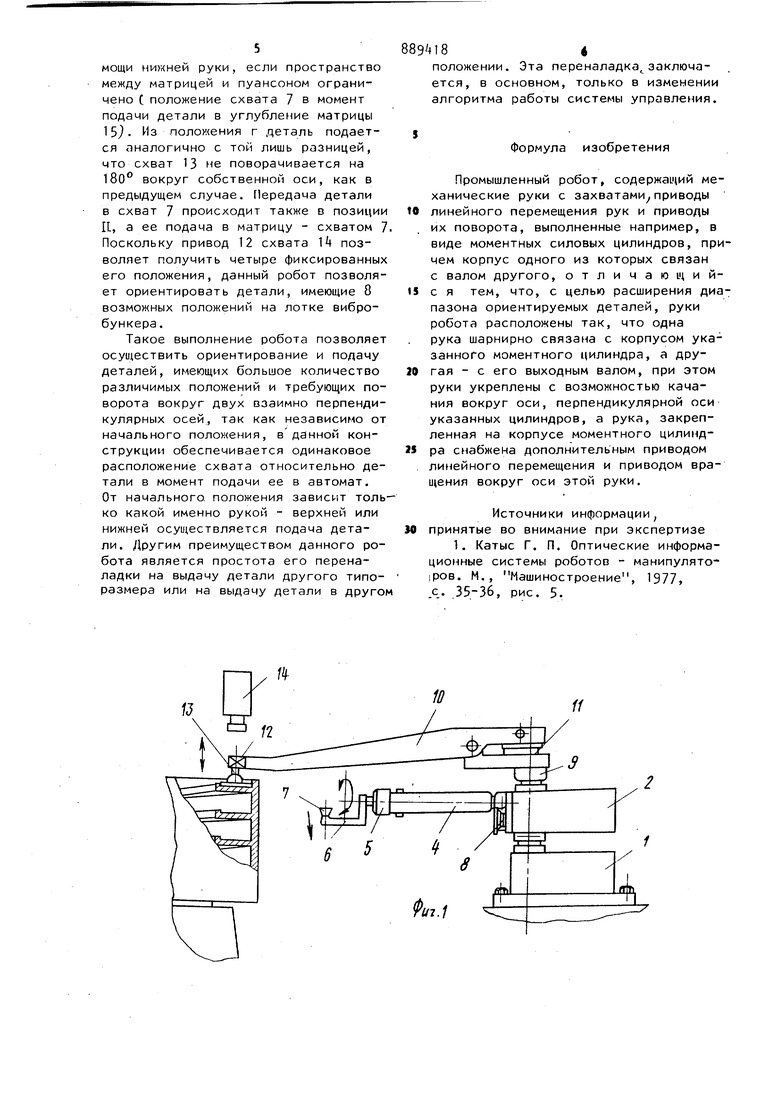
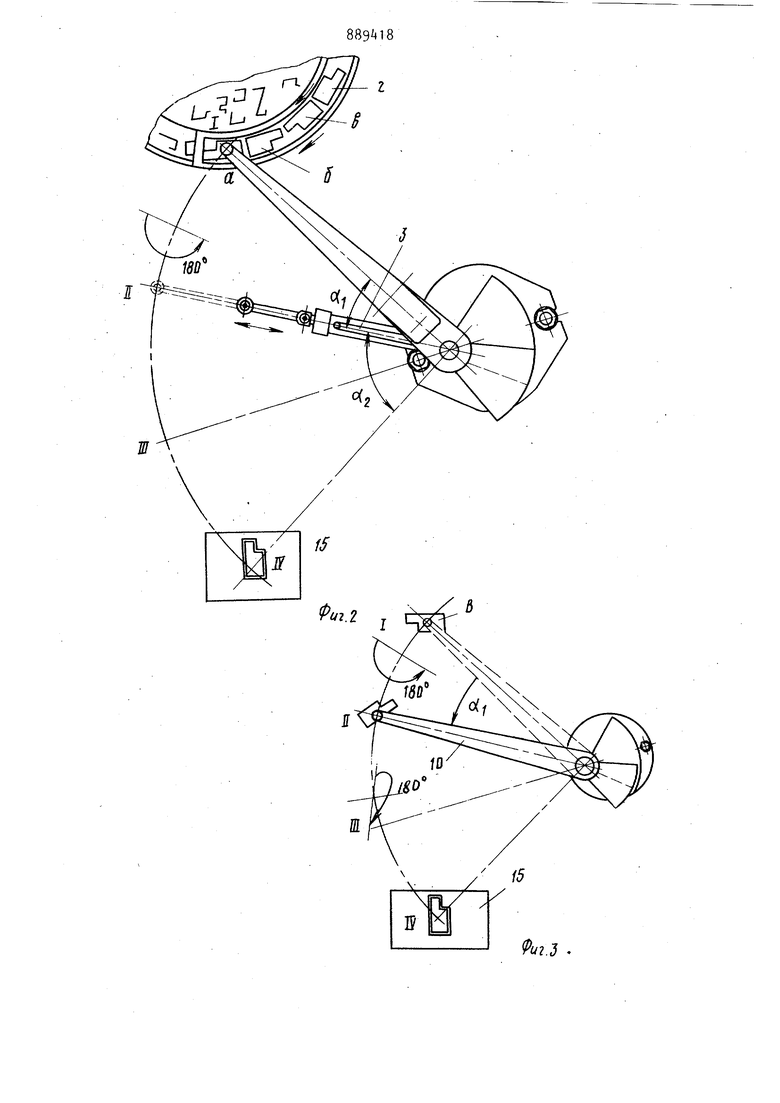
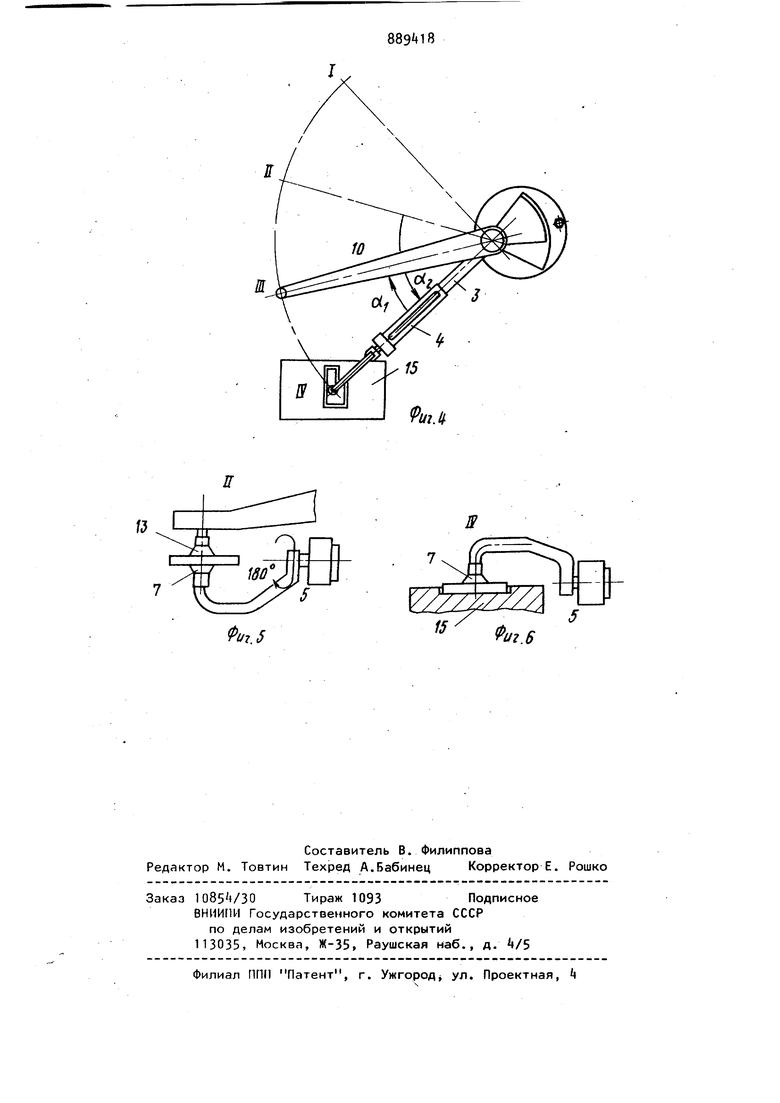
На фиг. 1 представлен робот, общий вид; на фиг. 2 - вид сверху при подаче и ориентировании детали одной рукой; на фиг. 3 вид сверху при ориентировании детали с помощью двух рук; на фиг. t - заключительная фаза этого процесса - подача в матрицу с помощью нижней руки; на фиг. 5 - процесс передачи детали от верхней руки к нижней; на фиг. 6положение схвата руки отно3сительно детали при подаче ее в матрицу. Устройство содержит два поворотных привода 1 и 2, причем выходной вал привода 1 жестко соединен ,с корпусом привода 2. Вал привода 1 поворачивается на угол о/о, в два раза больший угла поворота о( выходного вала привода 2. На корпусе привода 2 шарнирно укреплена нижняя рука, состоящая из пневмоцилиндра 3 на штоке которого укреплена гильза k с приводом поворота 5, на валу которого зркреплен- кронштейн 6 с вакуумным схватом 7. На корпусе 2 смонтирован также привод 8, обеспечивающий качательное движение нижней руки в вертикальной плоскости. На вы ходном валу привода 2 с помощью кронштейна 9 шарнирно укреплена верх няя рука 10, снабженная приводом качательногодвижения 11 и приводом 12 поворота схвата 13, который обеспечи вает поворот схвата вокруг вертикаль например на углы 90°, 1 B(f НОИ оси, 270. Привод 5 обеспечивает поворот схвата 7 на угол 180 вокруг горизонтальной оси. Над зоной захвата детали Il установлено опознающее устройство 15, соединенноес системой управления роботом. Работу робота рассмотрим на примере ориентирования и подачи детали, имеющей t возможных положения, а,б,в, и г (см. фиг. 1). Для ориентирования такой детали требуется развернуть ее в двух взаимно перпендикулярных плоскостях на 0° и в зависимости от исходного и требуемого положений. Предположим, что крайняя деталь на лотке вибробункера занимает положение а. Опознающее устройство определяет положение, занимаемое деталью, и переда ет эту информацию в систему управле ния, которая вырабатывает соответст вующие команды, подаваемые на приво ды 1 , 2, 3, 5, 14, 12 и на схваты 13 и 7 вакуумного или электромагнитного принципа действия. Схват 13 захватывает деталь положения а и рука 10, совершая камательное движение за счет привода 11, поднимает ее над лотком, после чего поворачива ется на угол 0 против часовой стре ки вместе с выходным,валом привода Одновременно схват 13 вместе с деталью поворачивается на угол iBO относительно собственной оси. Кроме . 4 того, в данном случае система управления 1подает- команду на привод 1 поворачиваюи1ий корпус привода 2 также против часовой стрелки на угол а.. Таким образом рука 10 поворачивается на суммарный угол э-,, деталь оказывается над углублением в матрице 15 в положении, которое в точности повторяет его форму, после чего рука 10 совершает очередное качание, вставляет деталь в углубление § матрице, схват 13 отпускает деталь, составляя ее в матрице и робот возвращается в исходное положение. После совершения операции, например пробивки отверстия, деталь удаляется из отверстия матрицы 15 сжатым воздухом, а робот захватывает деталь положения б и процесс повторяется с той только разницей, что сигнала на привод 12 поворота схвата 13 не подается и, в результате деталь вновь оказывается над отверстием в матрице в заданном положении. Деталь же, занимающая положение-б уже не может быть подана в матрицу рукой 10, так как требует поворота на 180 вокруг двух взаимно перпендикулярных осей. Ориентирование детали происходит следующим образом. После получения информации о положении детали от опознающего устройства схват 13 захватывает деталь положения и рука 10 из положения 1 поворачивается на угол oL в положение 11 с одноеременным поворотом схвата 13 на 180 вокруг собственной оси, а нижняя рука за счет привода линейного перемещения 3 выдвигает схват 7 также в положение 11, в котором оси схватов 7 и 13 совпадают. Затем схват 7 перемещается вверх за счет качательного движения руки, получаемого от привода 8, захватывает деталь, находящуюся в схвате 13 и после отпускания схвата 13 и отвода руки 10, переворачивает ее вокруг горизонтальной оси на 180, занимая место схвата 13. Ру ка 10 отводится в сторону поворотом выходного вала привода 2 на угол d по часовой стрелке, а нижняя рука с деталью за счет привода 1 поворачивается на угол о(. 2. вместе с корпусом привода 2 и занимает положение V , причем положение детали вновь совпадает с конфигурацией отверстия в матрице 15, а верхняя рука 10, в результате, занимает положение Ш и не мешает подаче детали в матрицу при помощи нижней руки, если пространство между матрицей и пуансоном ограничено С положение схвата 7 в момент подачи детали в углубление матрицы 15). Из полохкения г деталь подается аналогично с той лишь разницей, что схват 13 не поворачивается на 180 вокруг собственной оси, как в предыдущем случае. 1ередача детали в схват 7 происходит также в позиции 11, а ее подача в матрицу - схватом 7 Поскольку привод 12 схвата 14 позволяет получить четыре фиксированных его положения, данный робот позволяет ориентировать детали, имеющие 8 возможных положений на лотке вибробункера.
Такое выполнение робота позволяет осуществить ориентирование и подачу деталей, имеющих большое количество различимых положений и требующих поворота вокруг двух взаимно перпендикулярных осей, так как независимо от начального положения, вданной конструкции обеспечивается одинаковое расположение схвата относительно детали в момент подачи ее в автомат. От начального, положения зависит только какой именно рукой - верхней или нижней осуществляется подача детали. Другим преимуществом данного робота является простота его переналадки на выдачу детали другого типоразмера или на выдачу детали в другом
889 4184
положении. Эта переналадка заключается, в основном, только в изменении алгоритма работы системы управления.
Формула изобретения
Промышленный робот, содержащий механические руки с захватами приводы
линейного перемещения рук и приводы их поворота, выполненные например, в виде моментных силовых цилиндров, причем корпус одного из которых связан с валом другого, отличающийс я тем, что, с целью расширения диапазона ориентируемых деталей, руки робота расположены так, что одна рука шарнирно связана с корпусом указанного моментного цилиндра, а другая - с его выходным валом, при этом руки укреплены с возможностью качания вокруг оси, перпендикулярной оси указанных цилиндров, а рука, закрепленная на корпусе моментного цилиидра снабжена дополнительным приводом линейного перемещения и приводом враи4ения вокруг оси этой руки.
Источники информации, принятые во внимание при экспертизе
1, Катыс Г. П. Оптические информационные системы роботов - манипулятоIPOB. М., Машиностроение, 1977, .с- .35-36, рис. 5.
S
