Изобретение относится к машиностроению, преимущественно к робототехнике, и предназначено для автоматизации технологических процессов транспортировки, укладки деталей, сборки, установки и передачи их на станки в автоматических линиях и т.д.
Известен промышленный робот, содержаший руку со схватом и приводы поворота, подъема и перемещения руки. Последняя выполнена в виде пневматического цилиндра с регулируемой по двум жестким упорам длиной хода штока, механизм поворота руки имеет три точки позиционирования, а механизм подъема выполнен в виде пневмоцилиндра с двумя точками позиционирования 1.
Недостатком робота являются его ограниченные технологические возможности изза малого количества точек позиционирования.
Известен также промышленный робот, содержащий основание с установленными на нем приводами подъема, горизонтального перемещения и поворота руки, причем на торцовых поверхностях руки закреплены схваты, и систему управления 2.
Недостатками известного промышленного робота являются узкие технологические возможности и невысокие динамические характеристики.
Целью изобретения является расширение технологических возможностей за счет увеличения количества точек позиционирования и улучшения динамических характеристик.
Поставленная ц ии, достигается тем, что промышленный робо., содержащий корпус с установленными на нем приводами подъема, горизонтального перемещения и поворота руки, причем на торцовых поверхностях руки закреплены схваты, снабжен передачей с гибкой связью и крестообразным рычагом, одним плечом щарнирно установленным на корпусе, при этом привод поворота руки выполнен в виде двух демпферов, моментного пневмодвигателя, на корпусе которого закреплены эти демпферы и выполнены кольцевые проточки, и регулируемых выдвижных и жестких упоров, расположенных в кольцевых проточках корпуса моментного пневмодвигателя, причем одно плечо крестообразного рычага установлено с возможностью взаимодействия с регулируемыми выдвижными упорами привода поворота, а двумя другими - поочередного взаимодействия с демпферами, при этом привод горизонтального перемещения руки выполнен в виде установленных по обе стороны от нее двух блоков пневмоцилиндров, кинематически связанных с рукой передачей с гибкой связью, звездочки которой смонтированы на штоках пневмоцилиндров привода горизонтального перемещения, а
гибкие элементы этой же передачи закреплены одними концами на руке, а другими - на корпусе привода поворота, а привод подъема выполнен в виде вертикально спаренс ных пневмоцилиндров и демпферов, установленных на их корпусах, причем приводы подъема и поворота расположены на одной оси.
При этом промышленный робот снабжен механизмом фиксации горизонтального пе0 ремещения руки и направляющими салазками, закрепленными на корпусе привода поворота, а рука выполнена в виде коробчатой балки с фиксирующими отверстиями на одной из ее граней для взаимодействия с
, рабочим элементом механизма фиксации, и роликами, взаимодействующими с направляющими.
Кроме того, с целью обеспечения перво начальной юстировки руки по высоте, пневмоцилиндр привода подъема снабжен на0 правляющими скалками, установленными жестко в поршне и с возможностью свободного перемещения в основании.
Причем промышленный робот снабжен гильзой, а приводы подъема и поворота уста5 новлены в этой гильзе.
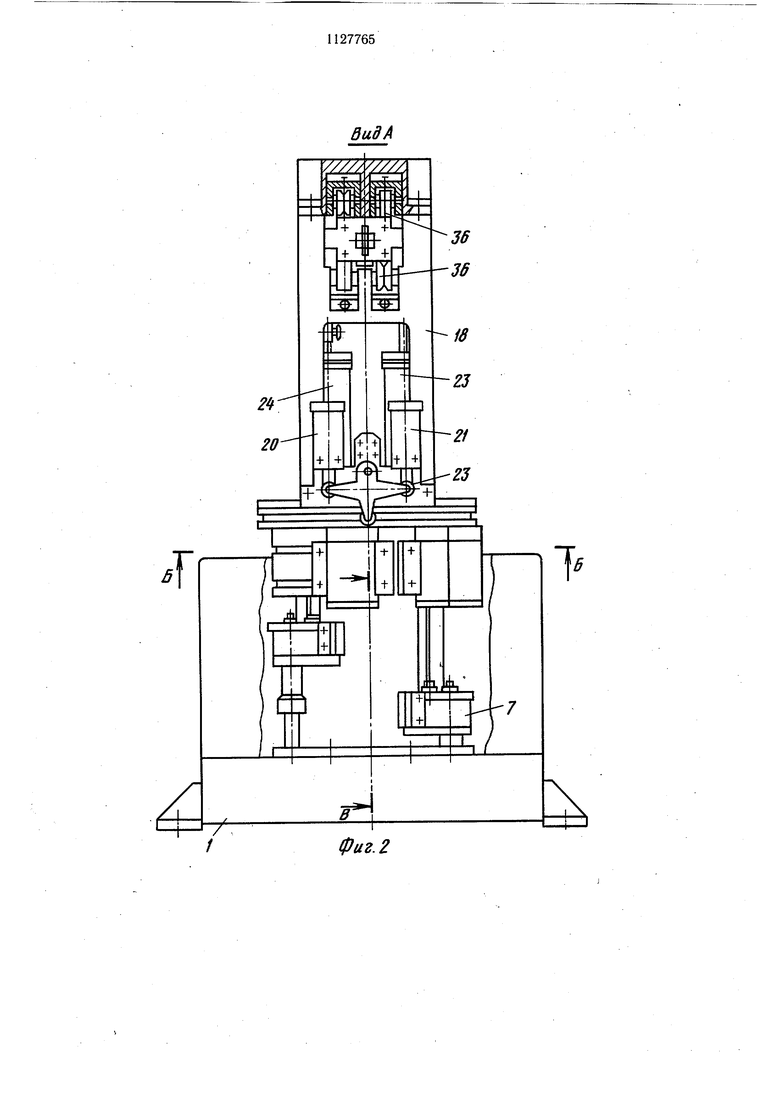
На фиг. 1 изображен промышленный робот, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - робот, вид сверху; на фиг. 4 - сечение Б-Б на фиг. 2 (расположение регулируемых выдвижных и жестких упоров);
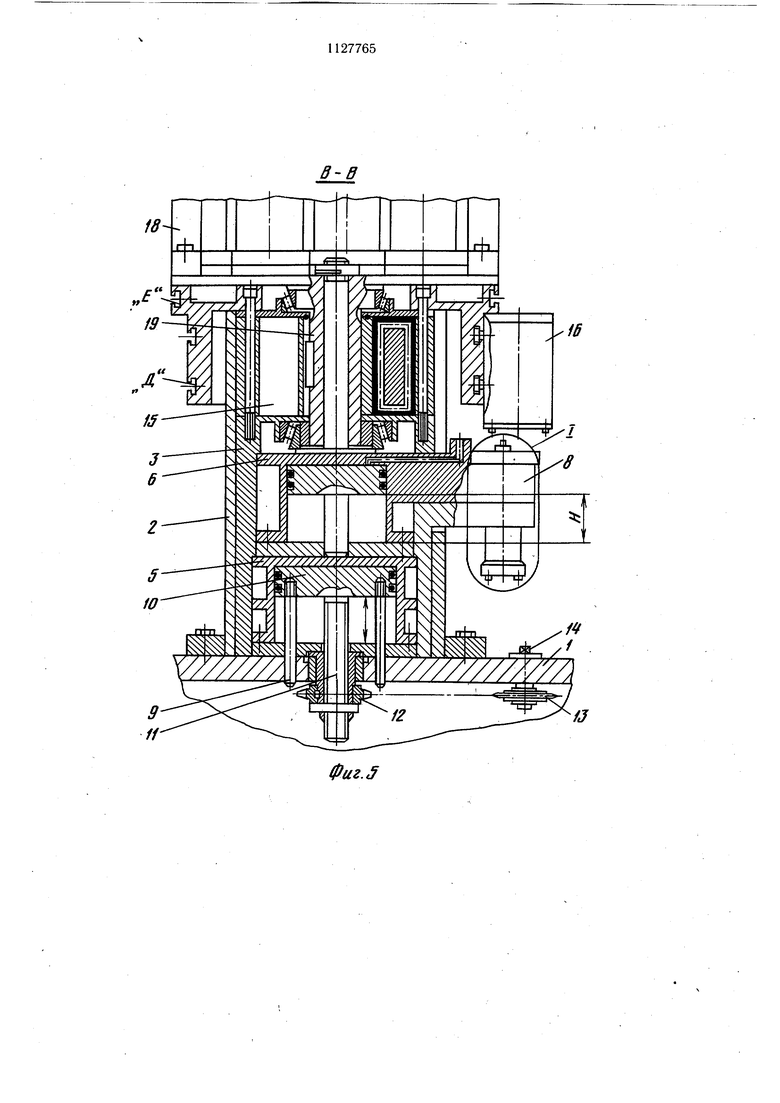
0 на фиг.б - сечение В-В на фиг. 2 (приводы подъема и углового поворота руки); на фиг. 6 - сечение Г-Г на фиг. 3; на фиг. 7узел 1 на фиг. 5 (демпфер).
Промышленный робот содержит основание 1 с жестко закрепленной на нем стой5 кой 2, внутри которой расположена гильза 3. Внутренняя поверхность последней выполнена с двумя выступами, кроме того, в ней установлен привод подъема руки 4, включающий вертикальные пневмоцилинд0 ры 5 и б с укрепленными на их корпусах демпферами 7 и 8. В нижнем пневмоцилиндре 5 находятся направляющие скалки 9, жестко связанные с поршнем 10, с одной стороны, с возможностью перемещения в основании, с другой, щток 11 этого пневмо цилиндра через звездочки 12 и 13 связан с осью 14 для первоначальной юстировки руки робота по высоте.
В гильзе 3 установлен моментный пневмодвигатель 15 привода поворота руки 4,
0 в кольцевых проточках «Д и «Е корпуса моментного пневмодвигателя закрепляются соответственно регулируемые выдвижные 16 и регулируемые жесткие упоры 17. Регулируемые выдвижные упоры 16 выполнены в виде пневмоцилиндров. Верхняя часть
5 привода поворота представляет собой корпус 18, жестко связанный с выходным валом 19 моментного пневмодвигателя 15. На корпусе, 18 смонтированы демпферы 20 и 21,
взаимодействующие с противоположными плечами крестообразного рычага 22. В этом же корпусе установлен привод горизонтального перемещения руки 4, представляющий собой два блока, например, из трех пневмоцилиндров 23 и 24, расположенные по обе стороны от руки. Штоки 25 и 26 этих пневмоцилиндров снабжены элементами передачи с гибкой связью, например, звездочками 27 и 28. В качестве гибких связей в роботе использованы цепи 29 и 30, расположенные вдоль руки 4 и закрепленные одними концами на ней, с противоположных сторон, другими на корпусе 18 привода поворота, причем каждая из этих цепей огибает звездочки соответствующих блоков пневмоцилиндров 23 и 24 и ролики 31, закрепленные на корпусе 18 привода поворота. Каждый пневмоцилиндр привода горизонтального перемещения руки 4 снабжен демпфером 32.
Рука 4 выполнена в виде рустотелой коробчатой балки с фиксирующими отверстиями на нижней грани, предназначенными для взаимодействия с механизмом фиксации 33 горизонтального перемещения, выполненного в виде пневмоцилиндра с щтоком 34. Для предотвращения перекоса при движении рука имеет направляющие салазки 35, а корпус 18 - ролики 36. На торцах руки смонтированы схваты 37 с индивидуальными приводами 38.
Демпферы 7 и 8 (фиг. 7) снабжены регулируемой по высоте гайкой 39, установленной на штоке-поршне 40, который заканчивается хвостовиком 41. Корпус 42 каждого из демпферов жестко .связан с соответствующим . корпусом пневмоцилиндров 5 и 6. В демпфере расположены две полости, заполненные масляной ванной и сообщающиеся друг с другом с помощью перепускных каналов 43, обратных клапанов 44 и 45 и дросселя 46, выполненного внутри штокапоршня 40. К гильзе 3 прикреплен стакан 47, внутри которого находится нижняя часть щтока-порщня 40 с гайкой 39, и выполненный с внутренним выступом.
Промышленный робот работает следующим образом.
Исходная высота руки устанавливается вращением оси 14, которое через звездочки 12 и 13 передается щтоку 11 пневмоцилиндра 5, и при подъеме штока 11 поднимается корпус 18 придода поворота вместе с рукой 4. Наличие двух направляющих скалок 9 предотвращает поворот пневмоцилиндра 5 вокруг оси. После проведения юстировки рука может осуществлять захват и перенос деталей на высоту, определяемую тремя точками позиционирования: на нулевой высоте, на Н, на 2Н и на промежуточных уровнях Н в зависимости от положения гаек 39 на штоках 40 в демпферах 7 и 8. Высота Н, равная ,.где h - регулируемое расстояние от гайки 39 до внутреннего выступа стакана 47; (У..- ход демпфирования - постоянная характеристика для каждого демпфера. Эти положения, соответст5 вующие требуемой промежуточной высоте Н, определяются экспериментально или расчетным путем и устанавливаются предварительно перед началом работы вращением хвостовика 41 штока-поршня 40.В ре- зультате этого гайка устанавливается на
необходимой высрте h.
Для подъема на высоту Н по команде из системы управления (не показана) сжатый воздух подается в порщневую полость пневмоцилиндра 5, при этом, поскольку его
5 поршень 10 неподвижен, то на эту высоту поднимается корпус; пневмоцилиндра 5 вместе с верхним пневмоцилиндром 6, приводом поворота руки и самой рукой 4.
При необходимости осуществить подъем руки на высоту 2Н система управления вы0
дает сигнал на подачу сжатого воздуха в
поришевую полость пневмоцилиндра 6, шток с поршнем которого, упираясь в корпус пневмоцилиндра 5, остаются неподвижными относительно гильзы 3, а корпус пневмо5 цилиндра 6, поднимаясь на следующую высоту Н, перемещает корпус привода поворота с рукой.
Подъем руки на промежуточную высоту Н осуществляется подачей сжатого возду0 ха в поршневую полость пневмоцилиндра, например, 6. Его корпус, поднимаясь, перемещает верхнюю часть демпфера 8 вместе с штоком-поршнем 40 и гайкой 39. Стакан 47 демпфера остается неподвижным и гайка 39, дойдя до его внутреннего выступа,
останавливается и останавливает перемещение штока-поршня 40. Поскольку подача воздуха в пнемоцилиндр 6 продолжается, и корпус 42 также перемещается, а шток-поршень неподвижен, то последний,
воздействуя на внутренний объем масляной ванны, выдавливает жидкость через перепускные каналы 43 и дроссель 46 в наружную полость демпфера и через обратный клапан 44 во внутреннюю полость. -Процесс перетечки жидкости продолжается на ходе
демпфирования ...При этом рука поднимается на нужную высоту H hЧ-б,..обеспечивая позиционирование с точностью 0,2 мм При опускании процесс демпфирования осуществляется аналогично, только пере0 течка жидкости происходит через клапан 45.
При горизонтальном перемещениии руки в исходном состоянии штока 25, например, одного из блоков пневмоцилиндров находятся в крайнем положении, штоки 26 при этом другого блока - в крайнем положении.
5 Для перемещения руки на величину 2h сжатый воздух по команде из системы управления подается в штоковую полость первого цилиндра 23, при этом поршень опускается
на h, a звездочка 27, будучи в зацеплении с цепью 29, перемещает ее на расстояние 2h. В свою очередь, цепь 29, закрепленная одним концом на руке, другим - на корпусе 18 привода поворота, вытягивает руку также на 2h. В конце этого хода скорость движения поршня гасится с помощью демпфера 32, а рука фиксируется с помощью механизма фиксации 33, шток 34 которого при срабатывании этого механизма по команде из системы управления выдвигается и входит в фиксирующее отверстие на нижней грани руки, причем положение этих фиксирующих отверстий определено и задано для фиксации руки строго на расстояниях 2h, 4h, 6h. Для перемещения руки на длину 4h сжатый воздух подается в штоковые полости двух пневмоцилиндров 23, на длину 6h - трех пневмоцилиндров.
При перемешении руки от срабатывания одного блока пневмоцилиндров 23, цепь 30, расположенная на руке с противоположной стороны взаимодействует со звездочками 28 другого блока цилиндров 24 и вытягивает их штоки на ту же высоту, на какую опускаются штоки 25, совершающие рабочий ход. Штоки 26 при этом совершают холостой ход и в конце перемещения руки на заданную длину подготовлены для осуществления рабочего хода в обратную сторону таким же образом, как описано выше.
Для выполнения поворота руки со схватами 37 подается сигнал из системы управления, и сжатый воздух поступает в моментный пневмодвигатель 15. При вращении выходного вала 19, связанного с корпусом 18, последний поворачивается на определенные углы вместе с рукой и схватами. Эти углы с(.,,у.н т.д. задаются программой и определяются положением выдвижных регулируемых упоров 16 на кольцевой проточке «Д корпуса моментного пневмодвигателя 15. При повороте руки на ,. например, поступает сигнал на упор 16, шток которого, выдвигаясь, встречает нижнее плечо крестообразного рычага 22, который, в свою очередь, разворачиваясь, воздействует на щток одного из демпферов 20 или 21. Последний перекрывает подачу сжатого воздуха в пневмодвигатель 15 и рука, таким образом, повернулась на нужный угол. После осуществления технологической операции
5 схватами руки, сигнал подается на упор 16, шток которого, задвигаясь, прекращает взаимодействие с рычагом 22, а последний, возвращаясь в исходное положение, освобождает шток демпфера 20. Таким образом, моментный пневмодвигатель 15 про0 должает разворот корпуса с рукой на следующий угол, определенный программой технологического процесса всего робототехнического комплекса.
Таким образом, промышленный робот
позволяет получить значительное количество точек позиционирования как по высоте, так и при угловом повороте и горизонтальном перемешении. Это позволит существенно увеличить объем работ, выполняемых роботом в составе различных робототехнологических комплексов, и расщирить область его применения. Кроме того, предложенный привод горизонтального перемещения руки значительно улучшает динамические характеристики.
Т



| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1988 |
|
SU1542793A1 |
| МОДУЛЬ МАНИПУЛЯТОРА | 1991 |
|
RU2028928C1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Рука манипулятора | 1981 |
|
SU988546A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Промышленный робот | 1977 |
|
SU808262A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Промышленный робот | 1977 |
|
SU701791A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |




1. ПРОМЫШЛЕННЫЙ РОБОТ, содержащий основание с установленными на нем приводами подъема, горизонтального перемещения и поворота руки, причем на торцовых поверхностях руки закреплены схваты, и систему управления, отличающийся тем, что, с целью расширения технологических возможностей за счет увеличения количества точек позиционирования и улучшения динамических характеристик, он снабжен передачей с гибкой связью и крестообразным рычагом, одним плечом шарнирно установленным на корпусе, при этом привод поворота руки выполнен в виде двух демпферов, моментного пневмодвигателя, на корпусе которого закреплены эти демпферы и выполнены кольцевые проточки, и регулируемых выдвижных и жестких упоров, расположенных в кольцевых проточках корпуса моменТного пневмодвигателя, причем одно плечо крестообразного рычага установлено с возможностью взаимодействия с регулируемыми выдвижными упорами привода поворота, а друмя другими - поочередного взаимодействия с демпферами, при этом привод горизонтального перемещения руки выполнен в виде установленных по обе стороны от нее двух блоков пневмоцилиндров, кинематически связанных с рукой передачей с гибкой связью, звездочки которой смонтированы на штоках пневмоцилиндров привода горизонтального перемещения, а гибкие элементы этой же передачи закреплены одними концами на руке, а другими - на корпусе привода поворота, а привод подъема выполнен в виде вертикально спаренных пневмоцилиндров и демпферов, установленных на их корпусах, причем приводы подъема и поворота расположены по одной оси. (Л 2.Робот по п. 1, отличающийся тем, что он снабжен механизмом фиксации горизонтального перемещения руки и направляющими салазками, -закрепленными на корпусе привода поворота, а рука выполнена в виде коробчатой балки с фиксирующими отверстиями на одной из ее граней для взаимодействия с рабочим элементом механизма фиксации и роликами, взаимодействующими с направляющими. to 3.Робот по п. 1, отличающийся тем, что, с целью обеспечения первоначальной юстировки руки по высоте, пневмоцилиндр привода подъема снабжен направляющими-скал05 ками, установленными жестко в корпусе и СП с возможностью свободного перемещения в основании.J 4.Робот по п. 1, отличающийся тем, что он снабжен гильзой, а приводы подъема и поворота установлены в этой гильзе.
+II + I
Ф. 3
18
Фиг.З
16
fj
г ////////////////Л--- 1R
Фиг. 7
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Промышленные роботы | |||
| Каталог | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| М., НИИМаш, 1981, | |||
| с | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| Транспортно-загрузочные устройства | |||
| Каталог | |||
| Болгария, Выставка «Роботы-82, Л., Вертикальный манипулятор серии 521. | |||
