го
33
00.
00
1C
-27
(PL J
ным на раме К 1. Подпружиненные пружиной 28 коромысла 24 соединено с шатуном 21 и через серьгу 25 с пазом 31 - со штоком 26 электромагнита 27. На штоке 26 устан овлен У 32, на коромысле 24 - У 42, взаимодействующий с датчиком 43. При включении электромагнита 27 шток 26 и серьга 25 перемещается вниз, перемещая Р Г/ вправо.
При наезде груза на Р Г/ сектор 20 поворачивает коромысло 24, и серьга 25 опускается. Воздействуя на датчик 43, У 42 отключает электромагнит 27 и включает привод К. При этом Р 17 осью 19 ложится на У 33, образуя опору для груза, переходящего на К. 6 ил.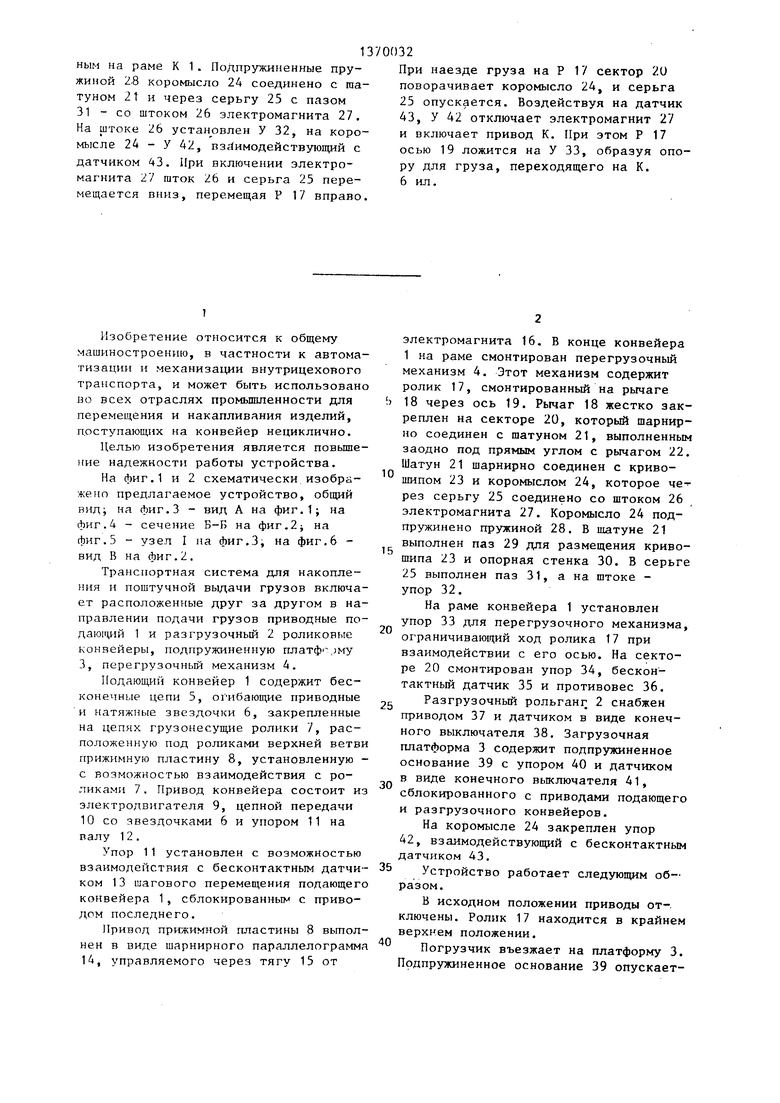
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для транспортирования трубчатых изделий | 1982 |
|
SU1055710A1 |
| Линия для производства формового хлеба | 1980 |
|
SU938878A1 |
| Устройство для проверки магнитных головок | 1980 |
|
SU892472A1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 2006 |
|
RU2313478C1 |
| Механизм ориентации устройства для загрузки и разгрузки стеллажа | 1985 |
|
SU1324959A1 |
| Устройство для формирования слоя изделий | 1991 |
|
SU1828429A3 |
| Автоматическая линия формирования садки кирпича на печной вагонетке | 1983 |
|
SU1178604A1 |
| Устройство для подачи штучных грузов на конвейер | 1976 |
|
SU621629A1 |
| Устройство для укладки листов в пирамиду | 1989 |
|
SU1776644A1 |
| Цепной конвейер | 1982 |
|
SU1016238A1 |
Изобретение относится к общему машиностроению, в частности к автоматизации и механизации внутрицехового транспорта и м.б. использовано для перемещения и накопления изделий, поступающих на конвейер (К) нецикличSuo A НО. Цель изобретения - повышение надежности работы устр-ва. Приводные подающий К1 и разгрузочный К установлены один за другим в направлении передачи груза. Перед К1 установлена подпружиненная площадка с размещенным под ней датчиком. Последний сблокирован с приводами К и датчиком шагового перемещения К, сблокированным с приводом К. Между К на раме установлен перегрузочный механизм, содержащий ролик (Р) 17, установленный осью 19 на упорном рычаге 18. Ось 19 последнего установлена с возможностью взаимодействия с упором (у) 33. Рычаг 18 жестко закреплен на секторе 20, шар- нирно соединенном с шатуном 21, В последнем выполнен паз 29 с размещенным в нем кривошипом 23, установлен-(Л
1
Изобретение относится к общему машиностроению, в частности к автоматизации и механиза1щи внутрицехового транспорта, и может быть использовано во всех отраслях промышленности для перемещения и накапливания изделий, поступающих на конвейер нециклично.
Целью изобретения является повышение надежности работы устройства.
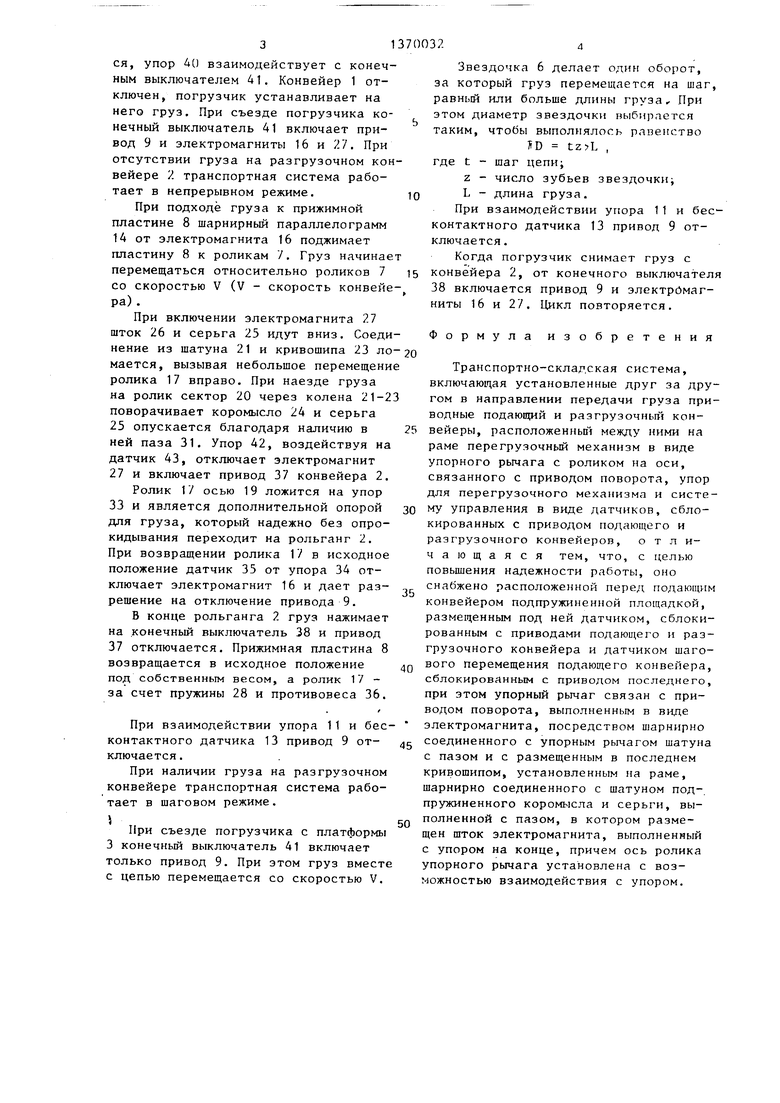
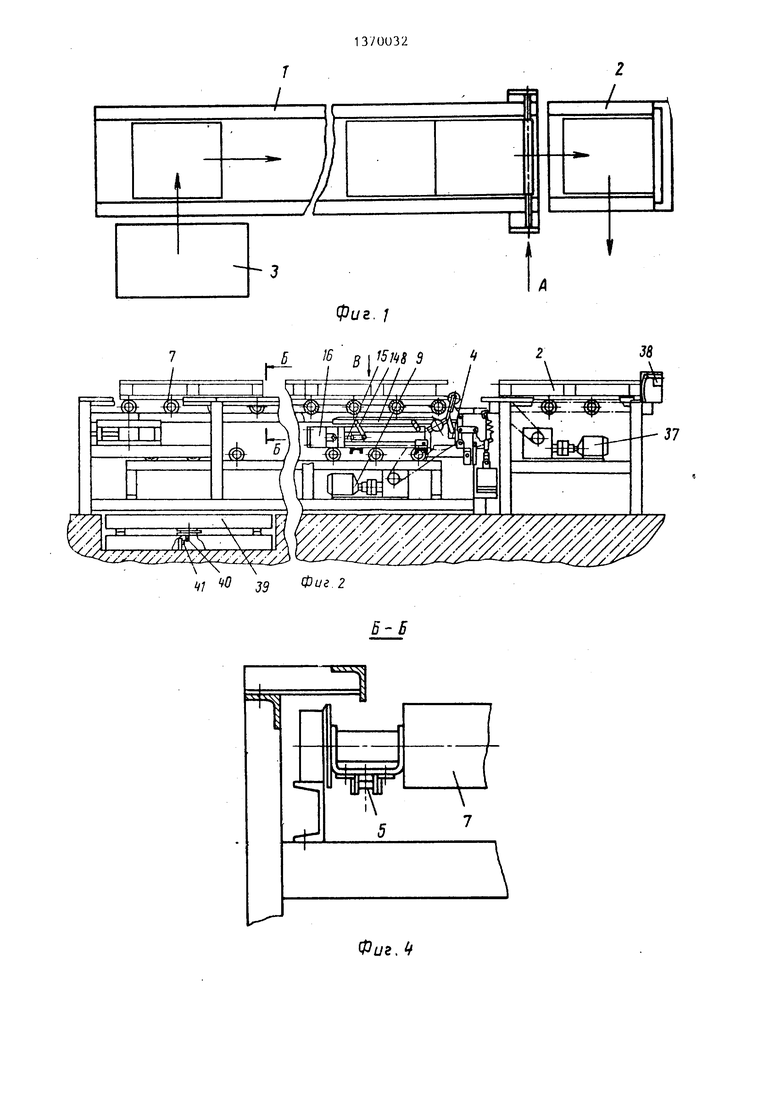
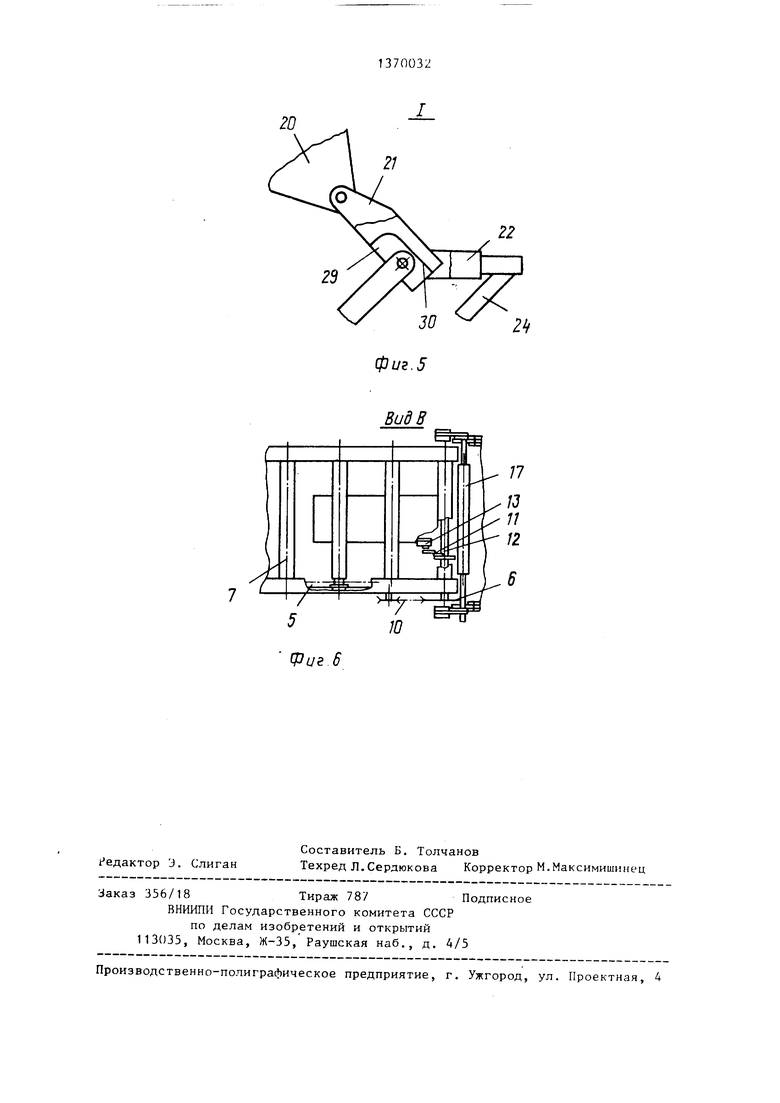
На фиг.1 и 2 схематически изображено предлагаемое устройство, общий вид на Аиг.З - вид А на фиг.1; на фиг. 4 - сечение Б-Б на фиг.2 на фиг.5 - узел I на фиг.З, на фиг.6 - вид В на фиг.2.
Транспортная система для накопления и поштучной выдачи грузов включает расположенные друг за другом в направлении подачи грузов приводные по даю1ций 1 и разгрузочный 2 роликовые конвейеры, подпружиненную платф )му 3, перегрузочный механизм 4.
Подающий конвейер 1 содержит бесконечные цепи 5, оГ ибающие приводные и натяжные звездочки 6, закрепленные на цепях грузонесущие ролики 7, расположенную под роликами верхней ветв прижимную пластину 8, установленную с возможностью взаимодействия с роликами 7, Привод конвейера состоит и электродвигателя 9, цепной передачи 10 со звездочками 6 и упором 11 на валу 12.
Упор 11 установлен с возможностью взаимодействия с бесконтактным датчиком 13 шагового перемещения подающег конвейера 1, сблокированным с приводом последнего.
Привод прижимной пластины 8 выполнен в виде шарнирного параллелограмм 14, управляемого через тягу 15 от
0
5
0
5
0
5
0
электромагнита 16, В конце конвейера 1 на раме смонтирован перегрузочный механизм 4. Этот механизм содержит ролик 17, смонтированный на рычаге 18 через ось 19. Рычаг 18 жестко закреплен на секторе 20, который шарнир- но соединен с шатуном 21, выполненным заодно под прямым углом с рычагом 22. Шатун 21 шарнирно соединен с кривошипом 23 и коромыслом 24, которое через серьгу 25 соединено со штоком 26 электромагнита 27. Коромысло 24 подпружинено пружиной 28. В шатуне 21 выполнен паз 29 для размещения кривошипа 23 и опорная стенка 30. В серьге 25 выполнен паз 31, а на штоке - упор 32.
На раме конвейера 1 установлен упор 33 для перегрузочного механизма, ограничивающий ход ролика 17 при взаимодействии с его осью. На секторе 20 смонтирован упор 34, бесконтактный датчик 35 и противовес 36.
Разгрузочный рольганг 2 снабжен приводом 37 и датчиком в виде конечного выключателя 38. Загрузочная платформа 3 содержит подпружиненное основание 39 с упором 40 и датчиком в виде конечного выключателя 41, сблокированного с приводами подающего и разгрузочного конвейеров.
На коромысле 24 закреплен упор 42, взаимодействующий с бесконтактным датчиком 43.
Устройство работает следующим образом.
Б исходном положении приводы от-, ключены. Ролик 17 находится в крайнем верхнем положении.
Погрузчик въезжает на платформу 3. Подпружиненное основание 39 опускает31370032
упор 4) взаимодействует с конечвыключателем 41, Конвейер 1 отзара эт та
него груз. При съезде погрузчика конечный выключатель 41 включает привод 9 и электромагниты 16 и 27. При отсутствии груза на разгрузочном конвейере 2 транспортная система работает в непрерывном режиме.
При подходе груза к прижимной пластине 8 шарнирньш параллелограмм 14 от электромагнита 16 поджимает пластину 8 к роликам У. Груз начинае перемещаться относительно роликов 7 со скоростью V (V - скорость конвейе ра) .
При включении электромагнита 27 шток 26 и серьга 25 идут вниз. Соединение из шатуна 21 и кривошипа 23 ло мается, вызывая небольшое перемещени ролика 17 вправо. При наезде груза на ролик сектор 20 через колена 21-2 поворачивает коромысло 24 и серьга 25 опускается благодаря наличию в ней паза 31. Упор 42, воздействуя на датчик 43, отключает электромагнит 27 и включает привод 37 конвейера 2.
Ролик 17 осью 19 ложится на упор 33 и является дополнительной опорой для груза, который надежно без опрокидывания переходит на рольганг 2. При возвращении ролика 17 в исходное положение датчик 35 от упора 34 отключает электромагнит 16 и дает разрешение на отключение привода 9.
В конце рольганга 2 груз нажимает на конечный выключатель 38 и привод 37 отключается. Прижимная пластина 8 возвращается в исходное положение под собственным весом, а ролик 17 - за счет пружины 28 и противовеса 36.
При взаимодействии упора 11 и бесконтактного датчика 13 привод 9 отключается.
При наличии груза на разгрузочном конвейере транспортная система работает в шаговом режиме.
При съезде погрузчика с платформы 3 конечный выключатель 41 включает только привод 9. При этом груз вместе с цепью перемещается со скоростью V.
Звездочка 6 делает один оборот, за который груз перемещается на шаг, равный или больше длины груза. При этом диаметр звездочки выбирается таким, чтобы выполнялось равенство
TiD , где t - шаг цепи;
Z - число зубьев звездочки; L - длина груза.
При взаимодействии упора 11 и бесконтактного датчика 13 привод 9 отключается.
Когда погрузчик снимает груз с конвейера 2, от конечного выключателя 38 включается привод 9 и электрймаг- ниты 16 и 27. Цикл повторяется.
Формула изобретения
0
0
5
0
5
0
Транспортно-складская система, включающая установленные друг за другом в направлении передачи груза приводные подаю1ций и разгрузочный кон- 5 вейеры, расположенньй между ними на раме перегрузочньй механизм в виде упорного рычага с роликом на оси, связанного с приводом поворота, упор для перегрузочного механизма и систему управления в виде датчиков, сблокированных с приводом подающего и разгрузочного конвейеров, о т л и- чающаяся тем, что, с целью повьш ения надежности работы, оно снабжено расположенной перед подающим конвейером подпружиненной площадкой, размещенным под ней датчиком, сблокированным с приводами подающего и разгрузочного конвейера и датчиком шагового перемещения подающего конвейера, сблокированным с приводом последнего, при этом упорный рычаг связан с приводом поворота, выполненным в В1аде электромагнита, посредством шарнирно соединенного с упорным рычагом шатуна с пазом и с размещенным в последнем кривошипом, установленным на раме, шарнирно соединенного с шатуном под-. пружиненного коромысла и серьги, выполненной с пазом, в котором размещен шток электромагнита, выполненный с упором на конце, причем ось ролика упорного рычага установлена с возможностью взаимодействия с упором.
7 /
Фиг. 1
5 5 В S Э
1/1/
.;A.
wzzzzz TSszz / /: J5 -
38
Фиг, it
22
фиг.5
Вид В
| УСТРОЙСТВО ДЛЯ ОХЛАЖДЕНИЯ СУДОВЫХ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 2009 |
|
RU2418177C2 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Авторское свидетельство СССР № 689908, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
