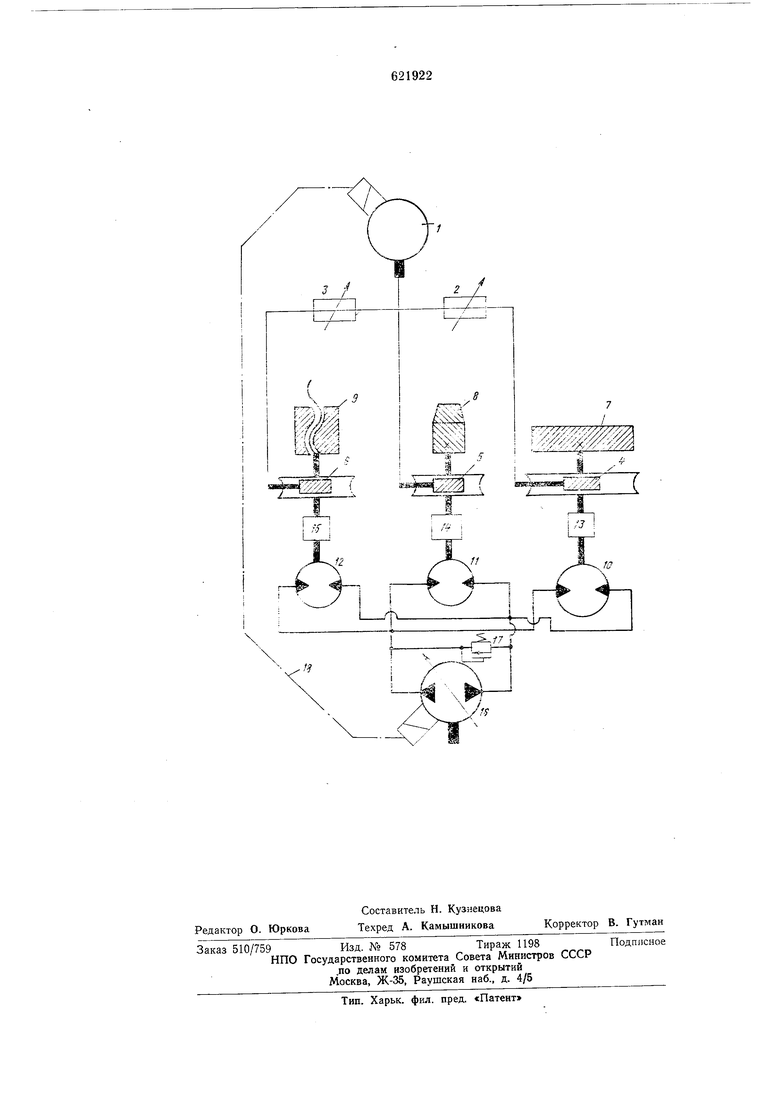
ные кинематические аепи сблокированы электрической обратной связью 18. Самотормозящиеся механизмы 4, 5 и 6 выполнены, например, з :зиде черзяка и червячного колеса.
Привод работает следующим образом.
П,ри включении выходны.х звеньев станка в движен1 е с некоторым опережением в долях секунды -в сравнении с началом пуска дополнительных силовых кинематических цепей включаются синхронизирующие кинематические цепи привода от двигателей 1, которые посредством органов настроек 2 и 3 настраивают станок на обработку соотзэтствующего изделия.
Затем включаются дополнительные силовые кинематические цепи, сообщающие червячиому колесу иди другому элементу самотормозящегося ,механиз-ма от двигателей 10, 11 п 12 черед редукторы-или муфты 13, 14 и 15 полную мощность, но выходным звеньям она может быть передана только посредством разрещающего движения червяка или другого элемента .самотормозящихся механизмов 4, 5 п 6 от синхронизирующих цепей.
При пуске привода фор.мообразующих движений зубообрабатывающего станка опережающее движение принадлежит синхронизирующим кинематическим цепям, а при работе стайка -в режиме резан-ия ведут дополнительные силовые кинематические цепи привода при разрещающем движении синхронизирующих кинематических цепей.
Таким образом, IB результате самотор.можения В самотоомозящихся механизмах
происходит выборка зазор01В в червячных передачах (или других самотормозящихся механизма1х) И в элементах синхронизирующих .кинематических цеией, влияющих в полной мере 1на выходную точло-сть стакка. Синхронизирующие кинематические цепи (Всегда имеют предварительный натяг, вел чи1на «оторого определяется передаваемой мощностью дополнительных силовых кинематических .
Ф о р -м у л а и 3 о б р е т е iH и я
Привод фюрмосбразующих дв.ижемий стан.ка, например ,зубоо.брабатывающего, содержащий оаноз-ные двигатели, .синхронизирующие ;Кинемати.чйаК;Ие цепи обката и дифференциала, соединяемые с выходными звеньями |Стан:«а, отл.и ч а ю щ и и с я тем, что, с целью по-вышения точности формообразующих движений за счет обеопечеция преД|Вар.ительно.го натяга в кинематических цепях и .снижения деформа;ций в них, он снабжен до.полнительны1ми силовыми кинематическими цепями, включающими и.ндивидуальные д-вигател.и, об.ратной озязью последних с осн01аными двигателями и самотормозящимися механиз1 1:ами, связывающими дополнительныесиловью кинематические цапи с синхронизирующими.
Источник инфор.мации, принятый во вни мание прн Э1кспертизе:
1. Бутуев В. .В., Налетов С. П. Тяжелые зубооб.рабатЫ|вающие станки. М., «Мащииостроение, 1976, 265-269.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения каретки вырубочного пресса | 1972 |
|
SU436665A1 |
| Способ определения жесткости привода станка | 1991 |
|
SU1812060A1 |
| Механический усилитель мощности | 1976 |
|
SU771390A1 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| Гидравлический механизм перемещения угольного комбайна | 1988 |
|
SU1606654A1 |
| Установка для сборки резинотехнических изделий | 1980 |
|
SU971666A1 |
| ЗУБЧАТО-РЫЧАЖНЫЙ МЕХАНИЗМ С ПЕРИОДИЧЕСКИМИ ОСТАНОВКАМИ В.И. ПОЖБЕЛКО | 2003 |
|
RU2252350C1 |
| Механическая рука | 1980 |
|
SU1006206A2 |
| Привод подвижного органа металлорежущего станка | 1988 |
|
SU1627771A2 |
| СПОСОБ АВТОМАТИЧЕСКОГО И НЕПРЕРЫВНОГО ИЗМЕНЕНИЯ КРУТЯЩЕГО МОМЕНТА И СКОРОСТИ ВРАЩЕНИЯ ВЫХОДНОГО ВАЛА В ЗАВИСИМОСТИ ОТ СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2398989C2 |