вылета рабочего органа выполнена в внде связанного с полостями этого силового цилиндра двухпозиционного переключателя с рукояткой и расположенных по разные стороны от нее и укрепленных на пересекающем заднюю платформу участке каната поводков, взаимодействующих с рукояткой при смещении каната в ту или иную сторону в зависимости от направления поворота шасси.
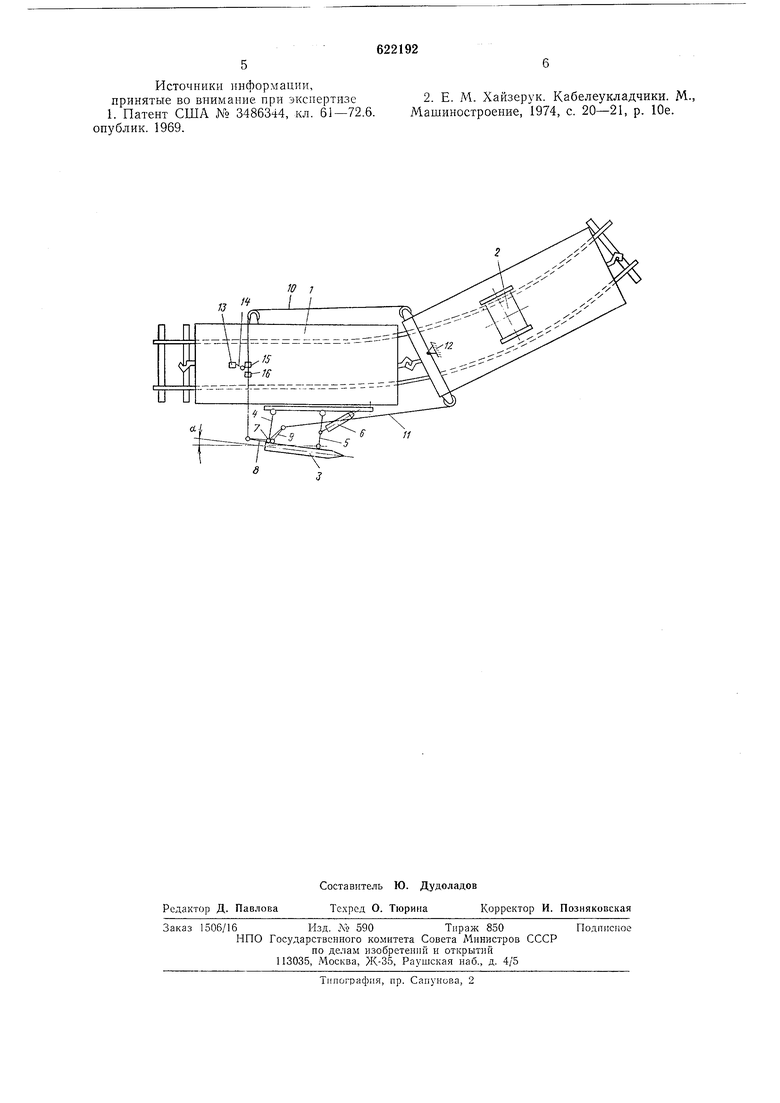
На чертеже схематически изображено предлагаемое устройство.
Кабелеукладчик включает размещенные на щасси 1 кабельные барабаны 2 и поворотный в плане ножевой рабочий орган 3, размещенный на тягах 4 и 5 шарнирного параллелограмма, в диагонали которого размещен силовой цилиндр 6 изменения вылета рабочего органа 3. Тяги 4 и 5 шарнирного параллелограмма размещены в горизонтальной плоскости на консоли шасси, а вертикальный палец 7 шарнирного присоединения к рабочему органу 3 задней по ходу тяги 4 выполнен эксцентриковым для поворота рабочего органа в плане. Шасси 1 образовано сцепленной парой железнодорожных платформ, на задней из которых размещены рабочий орган 3 и система управления силовым цилиндром 6, на передней - кабельные барабаны 2 и на обеих- система управления поворотом эксцентрикового пальца 7, выполненная в виде установленного на пальце 7 коромысла и прикрепленной к его плечам 8 и 9 пары канатов 10 и 11, с обеих сторон шасси сходящихся к якорю 12, укрепленному на передней платформе, причем участок каната 10, отходящий от заднего плеча 8 коромысла, пересекает заднюю платформу. Система управления силовым цилиндром 6 изменения вылета рабочего органа выполнена в виде связанного с полостями этого цилиндра двухпозиционного переключателя 13 с рукояткой 14 и расположенных по разные стороны от нее и укрепленных на пересекающем заднюю платформу участке каната 10 поводков 15 и 16, взаимодействующих с рукояткой 14 при смещении каната 10 в ту или иную сторону в зависимости от направления поворота шасси 1.
Работает кабелеукладчик следующим образом.
При движении шасси по прямому участку тяги 4 и 5 шарнирного параллелограмма и запертое положение силового цилиндра 6 обеспечивают строгую параллельность ножевого рабочего органа 3 оси шасси, и следовательно оси пути. При входе шасси в кривой участок пути с центром поворота со стороны, противоположной расположению рабочего органа, канат 11 поворачивает эксцентриковый палец 7 за плечо 9 коромысла, что приводит к повороту рабочего органа 3 на угол а. Одновременно с этим плечом 8 коромысла осуществляется перемещение к рабочему орггшу каната 10 н поворот рукоятки 14 переключателя 13 поводком 15. От этого проис :одит подача рабочей жидкости в поршневую полость силового цилиндра 6 и увеличение вылета рабочего органа. При выходе из кривой канатом 10 эксцентриковый палец 7 и рукоятка 14 возвращаются в исходное положение.
При входе шасси в кривой участок пути с центром поворота со стороны рабочего органа эксцентриковый палец поворачивает рабочий орган на угол -а, а силовой цилиндр 6 обеспечивает уменьшение вылета рабочего органа.
Формула изобретения
1.Кабелеукладчик, включающий размещенные на шасси кабельные барабаны и поворотный в плане ножевой рабочий орган, размещенный на тягах шарнирного параллелограмма, в диагонали которого размещен силовой цилиндр изменения вылета рабочего органа, отличаюшийся тем, что, с целью обеспечения автоматизации поворота рабочего органа в плане и изменения его вылета на кривых участках при прокладке кабеля с железнодорол ного состава, тяги шарнирного параллелограмма размещены в горизонтальной плоскости на консоли шасси, а вертикальный палец шарнирного присоединения к рабочему органу задней но ходу тяги этого параллелограмма выполнен эксцентриковым для поворота рабочего органа в плане, при этом шасси образовано сцепленной парой железнодорожных платформ, на задней из которых размешены рабочий орган и система управления силовым цилиндром изменения вылета рабочего органа, на передней - кабельные барабаны и на обеих - система управления иоворотом эксцентрикового нальца.
2.Кабелеукладчик по п. 1, отличающийся тем, что система управления поворотом эксцентрикового пальца выполнена в виде установленного на нем коромысла и прикрепленной к его нлечам пары канатов, с обеих сторон шасси сходящихся к якорю, укрепленному на передней платформе, причем участок каната, отходящего от заднего плеча коромысла, пересекает заднюю платформу.
3.Кабелеукладчик по пп. 1 и 2, отличающийся тем, что система управления силовым цилиндром изменения вылета рабочего органа выполнена в виде связанного с полостями этого силового цилиндра двухпозиционного переключателя с рукояткой и расположенных по разные стороны от нее и укрепленных на пересекающем заднюю платформу участке каната поводков, взаимодействующих с рукояткой при смещении каната в ту или иную сторону в зависимости от направления поворота шасси.
Источники информации, принятые во внимание нри эксиертизе 1. Патент США № 3486344, кл. 61-72.6. опублик. 1969.
2. Е. М. Хайзерук. Кабелеукладчики. М., Машиностроение, 1974, с. 20-21, р. 10е.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Кузов транспортного средства для перевозки легковесных грузов | 1983 |
|
SU1142323A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| СИЛОВОЕ УСТРОЙСТВО К КОМПЬЮТЕРУ ДЛЯ УПРАВЛЕНИЯ ВИРТУАЛЬНЫМ САМОЛЕТОМ | 2012 |
|
RU2498833C1 |
| МАШИНА МАНИПУЛЯТОРНАЯ | 2009 |
|
RU2420952C1 |
| Лесопосадочный агрегат | 1982 |
|
SU1034634A1 |
| МАШИНА ТРАНСПОРТИРОВКИ И ОПРОКИДЫВАНИЯ КОВШЕЙ | 2014 |
|
RU2587123C2 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
| НОЖЕВОЙ ПРИЦЕПНОЙ КАБЕЛЕУКЛАДЧЙК | 1973 |
|
SU379950A1 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА БАЗОВОМ ШАССИ ТАНКА | 2000 |
|
RU2170906C1 |
Ю 7 I /.-(Р-//
