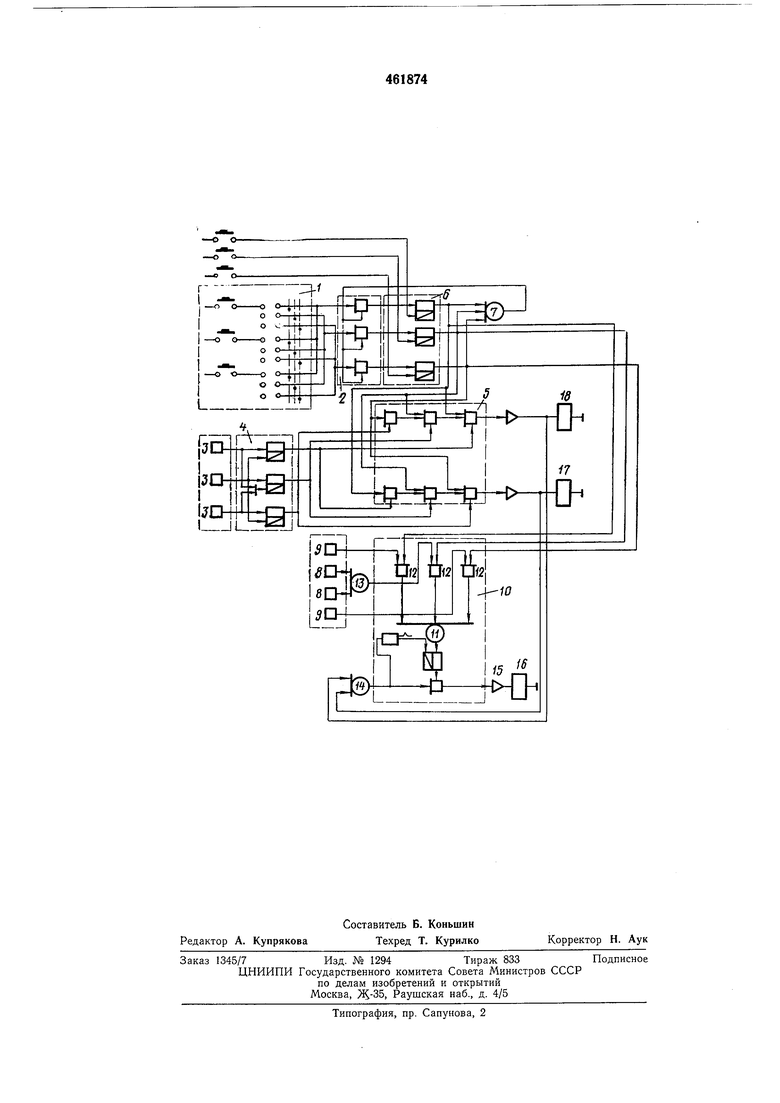
(54) йО ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТЕРОМ 3 12, а датчики подачи команд на торможение промежуточных точек соединены с этим же входом блока регулятора скорости iepes схему «ИЛИ 13 и схемы «И 1. Вторые входы всех схем «И 12 соединены с соответствую-.щими выходами блока б памяти команд, второй вход блока 10 регулятора скорости через схему «ИЛИ 14 соединен с выходными элементами блока 5 выбора направления движения, а выход блока 10 регулятора скорости подключен через усилитель 15 к обмотке пускателя 16 электродвигателя. Предлагаемое устройство работает следующим образом. При подаче команды с блока 1 сигнал проходит через блок / и запоминается соответствующими элементами блока и. Ьлок 6 даер импульс через схему «ИЛИ 7 на запирание всех элементов блока 2, на цепочки регистров блока 5 и на элементы блока 11). В зависимости от того, где раньше находилась тележка транспортера, блок 4 памяти положения тележки выдает запрет на соответствующие элементы блока 5. Сигнал проходит по одной из цепочек блока 6, включая соответствующий пускатель 17 или 18 движения тележки транспортера «вперед или «назад, и через схему «ИЛИ 14 - в блок 10 регулятора скорости, включая пускатель 16 электродвигателя. При этом привод транспортера раскручивается до номинальных оборотов, и обеспечивается необходимая плавность пуска тележки транспортера. При проходе тележки транспортера в за- данную зону срабатывает соответствующий датчик 8 подачи команды на торможение привода транспортера. Команда на торможение, проходит через соответствующий элемент блока 10 регулятора скорости, отключая пуска-j тель 16 электродвигателя. Электродвигательреверсируется, и привод тележки транспортера плавно снижает свои обороты до заданного значения. При подходе тележки транспортера в заданную точку зоны останова срабатывает соответствующий датчик 3 положения. С блока 4 запрет поступает в блок 5 на элементы, на которые поступала команда с блока 6, в ре46зультате чего элементы блока 5 запираются, команда не нрОхбдйт ни по одной из цепочек, и Тележка трайспор тера останавливается. Так как привод транспортера имеет к этому моменту минимальные обороты, выбег тележки будет также небольшой, чем обеспечийается высокая точность остановки тележки транспортера. исвобождение тележки транспортера производится подачей команды на сброс соответствующей памяти блока 6. Предмет изобретения Устройство для управления транспортером, содержащее блок адресования, подключенный к олоку запрета прохода команд, датчики положения тележки транспортера, подключенные к блоку памяти положения тележки, выход которого соединен с блоком выоора направления движения тележки, подключенным к блоку памяти команд и блоку запрета прохода команд через схему «ИЛИ, отличающееся тем, что, с целью обеспечения плавного пуска и торможения привода транспортера при транспортировке жидких и сыпучих материалов, а также обеспечения точной остановки тележки транспортера, в него введен блок регулятора скорости привода транспортера, датчики подачи команд на торможение (по два в каждой промежуточной точке зоны останова) и датчики точного останова (по одному в крайних точках позиции останова), причем датчики точного останова соединены с первым входом «ИЛИ блока регулятора скорости через схемы «И, каждая пара датчиков подачи команд на торможение промежуточных точек зоны останова соединена с этим же входом блока регулятора скорости через схему «ИЛИ и схемы «И, вторые входы всех схем «И соединены с соответствующими выходами блока памяти команд; второй вход блока регулятора скорости через схему «ИЛИ соединен с выхрдными элементами блока выбора направления движения, а выход «И блока регулятора скорости подключен через усилитель к обмотке пускателя электродвигателя
n
i7
цЩг МьГ-с-г{3

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления транспортером | 1976 |
|
SU738969A1 |
| Устройство для управления транспортером | 1974 |
|
SU578239A1 |
| Устройство управления приводами тягового органа и напольного ролика для цикловых перемещений материалов | 1987 |
|
SU1562246A1 |
| Устройство автоматического управления автоматом для укладки кирпича | 1988 |
|
SU1648779A1 |
| УСТРОЙСТВО для КОНТРОЛЯ ПОЛОЖЕНИЙ и УПРАВЛЕНИЯ РАЗГРУЗОЧНОЙ ТЕЛЕЖКОЙ | 1969 |
|
SU245867A1 |
| Устройство для точного адресования передаточной тележки | 1978 |
|
SU747789A1 |
| Устройство управления автоматом для укладки кирпича | 1990 |
|
SU1726265A1 |
| Способ раскряжевки лесоматериалов и раскряжевочная установка | 1987 |
|
SU1530444A1 |
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU1029369A1 |
| Устройство для подачи и точного останова лесоматериалов на раскряжевочных установках | 1987 |
|
SU1451012A1 |