(54) УСТРОЙСТВО ДЛЯ ТОЧНОГО АДРЕСОВАНИЯ ПЕРЕДАТОЧНОЙ ТЕЛЕЖКИ Изобретение относится к области автоматизации промышленности стройматериалов и может быть использовано при загрузке вагонеток с кирпичом в туннельные сушилки и печи, а также при выгруз ке из них. Известно устройство для адресования подвижного объекта, содержащее датчик положения объекта, задающий переключатель с магнитоуправляемыми контактами, равномерно расположенными и радиально ориентированными на неподвижной кругово плате, и электрическую схему, состоящую из двух параллельно подключенных к исто нику питания цепочек, каждая из которых образована реле и упомянутыми контактами 1. Недостатком такого устройства является низкая надежность работы. Наиболее близким техническим решением к изобретению является устройство для точного адресования передаточной тележки, содержащее размешенные на тележке блок реализации останова, включающий в себя датчик отключения, датчики реверса и элементы памяти, соединенные каждый одним из входов и вьтходов с одним из датчиков реверса, а другим входом - с датчиком отключения, коммутатор каналов, выходы . которого через усилители мощности соединены со входами блока программного пуска, связанного с электродвигателем тележки, один из входов соединен с датчиком отправки, другой - с триггером, соединенным из входов с выходом блока задержки, а третий и четвертый с датчиками реверса блока рештизации останова и размещенные на позициях адресования пассивные формирователи команд на останов и форм1фователь на отправку, соединенный беспроводным каналом связи с датчиком отправки 2j . В качестве датчиков реверса, отключения и отправки в этом устройстве могут быть использованы, например генераторные бесконтактные датчики КВП-8 или
КВП-16 С ПЛОСКИМ чувствительным элементом .
Принципиальная схема таких датчиков состоит из генератора и триггера на транзисторах. При приближении воздействующстч) металлического элемента копира на номинальное расстояние к их чувствительному элементу (состояние копир в датчике) происходит срыв генера1ши, вызывающий срабатывание выходного реле. Для отключения выходного реле необходимо убрать металлический копир (состо$тие отсутствие копира). В качестве копира упомянутых бесконтактных .датчиков можно также использовать другие однотипные бесконтактные дат-. чики. в этом случае имитация состояния отсутствие копира происходит не за счет удаления копира от датчшса, а за
счет коммутации цепей питания Koirapaдатчика. Действительно, копир-датчик с поданным на него питанием генерирует колебашш той же частоты, что и частота колебаний самого датчика. В этом случае срыва генарации колебаний датчика не происходит и датчик не срабатывает. Если обесточить цепь питашш копирадатчшса, то последний не генерирует колебаний, а генерация колебаний датчика срывается из-за наличия ферритового кольца в копире-датчике.
Формирователями Команд на отправку в известном устройстве могут служит как металлические копиры, так и копирыдатчики.
Однако, для нормальной работы блока реализации останова, состояпхего из двух датчиков реверса и одного датчика отключения, в качестве формирователя команды на останов нельзя использовать другой бесконтактный датчик, так. как полем одного датчика (из-за геометрических размеров его) нельзя управлять .сразу двумя датчиками, как это требуется для работы в известном устройстве и в качестве формирователя команд на останов приходится использовать металлический копир, т.е. пассивный формирователь, который можно изготовзггь любой геометрической формы.
При реализации схем, в которых движущийся объект должен последователь™ НО проходить несколько адресных пози- ций; для исключения срабатьшания блок реализации останова от первог о по трассе металлического копира известное устройство должно содержать не один блок реализаци останова, а столько, сколько адресных позиций,
причек подключение соответствующего блока реализации останова производится в зависимости от адреса отправки.
Использование нескольких таких блоков значительно усложняет схему устройства, и, как следствие, понижает
его надежность для лнoгoпoзициoнньtx
систем.
Цель изобретения - повышение надежнести работы.
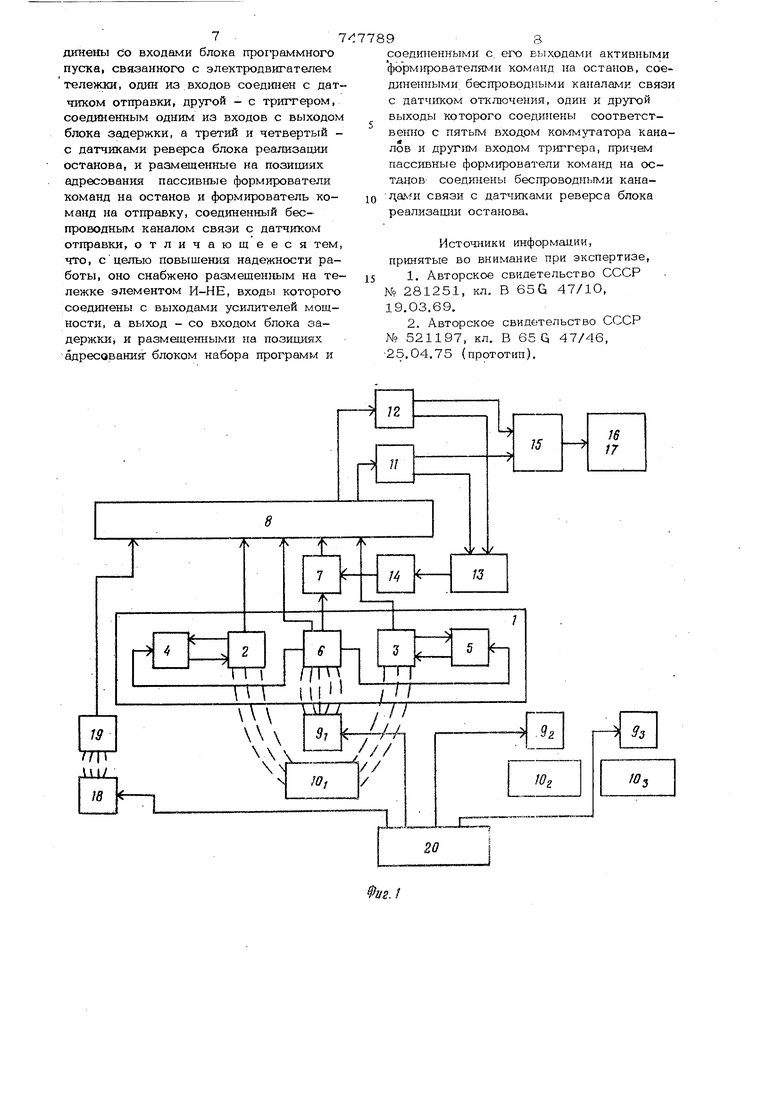
Поставленная цель достигается тем, что предлагаемое устройство снабжено раа /1ещенным на тележке элементом И-НЕ, входы которого соединены с выходами усилителей мощности, а выход со входом блока задержки, и размешенными на позициях адресования блоком набора программ и соединенными с его выходами активными формирователями команд на останов, соединенными беспроводными каналами связи с датчиком отключения, один и другой выходы котоpoiXD соедшгены соответственно с пятым входом коммутатора каналов и другим входом триггера, причем пассивные формирователи команд на останов соединены беспроводными каналами связи с датчиками реверса блока реализации останова. На фиг, 1 представлена функциональная схема предлагаемого устройства; на фиг. 2 - технологическая схема движени-я передаточной тележки.
Устройство содержит блок 1 реализации останова (фиг. 1) с датчиками 2 и 3 реверса, элементами 4 и. 5 памяти и датчиком 6 отклзочения, триггер 7, коммутатор 8 каналов, активньге формирователи 9.1 - 9.3 команд на останов, пассивные формирователи 10.1-10.3 команд на останов, усилители 11 и 12 мощности, элемент И-НЕ -13, блок 14 задержки, блок 15 программного пуска, двигатель 16 телечжи с тормозом 17, формирователь 18 команд на отправку, датч}-ж 19 отправки и блок 20 набора программ.
Все упомянутью элементы и блоки, за исключением активного и пассивногоформирователей 9,1-9.3, 10.1-10.3 комавдх на останов, формирователя 18 команд на отправку и блока 20 набора программ, установлены на передаточной тележке 21 (фиг.2), которая движется по рельсам 22 и с исходной позиции 23 развозит вагонетки с кирпичом на адресные позиции 24 и 25.
На исходной ПОЗК1ШИ 23 смонтированы активный формирователь 9.1 команд на останов, пассивный форм1фователь
lO, 1 команд на останов и формирователь 18 команд на отправку, на адресно позиции 24 - активный формирователь 9.2 команд на останов и пассивный формзфователь 1О.2 команд на останов, а
на адресной позиции 25-активный и пассивный формирователи 9.3 и Ю.З команд на останов.
С исходной позиции 23 к адресной позиции 25 движется тележка 21. При этом с блока 2О набора программ выдается команда на формирователь 18 команд на отправку и на активный формирователь 9.3 команд на останов,. расположенный у позиции 25.
При использовании в качестве фомирователей бесконтактньос генератс рных датчиков с плоским чувствительным элементом типа КВП-8 эта команда вьфажается в снятии напряжения питания с датчиков-формирователей. Формирователь 18 )оманд на отправку передает команду датчику 19 отправки и через первый канал коммутатора 8 каналов, в котором команда датчика 19 отправки запоминается, и усилитель 11 мощности включает блок 15 программного пуска. Двигатель 16 набирает скорость. На максимальной скорости тележка 21 проходит активный формирователь 9.2 команд на останов у позиции 24, так как последний не возбужден и у позиции 25 проходит над активным формирователем 9.3 команд на останов, по команде которого срабатывает датчик 6 отключения. Датчик 6 отключения через триггер 7 переключает коммутатор 8 каналов с первого канала на второй и этим переводит, схему в режим точного останова, при этом память команды датчика 19 отправки в первом канале коммутатора 8 каналов стирается. В то же время датчик 6 отключения через второй канал коммутатора 8 каналов отключает усили тель 11 мощности. Двигатель 16 обесточивается и тележка по инерции Проходит место точного останова, так как тормоз 17 не может обеспечить точный останов с полной скорости. При этом пассивный формирователь Ю.З воздействует на датчик 2 реверса назад, команда которого запоминается элементом 5 памяти, так как датчик 6 отключения, который снимает команду памяти, выходит из зоны действия активного формирователя 9.3 команд на останов раньще, чем датчик 2 реверса из зоны пассивного формирователя 10.3. Датчик
2 реверса через второй канал коммутатора усилитель 12 мощности и блок 15 программного пуска запускает двигатель 16 в противоположном направлении. Программа пуска двигателя 16 такова, что на участке выбега после максимальной скорости двигатель 16 не разгоняется до максимальной скорости. В результате этого тележка 21 подходит к месту требуемого останова с другой стороны и на меньшей скорости. Протекает уже указанный процесс . Однако срабатывает датчик 3 реверса. Затухающие колебания движения тележки 21 около места требуемогчэ останова происходит до тех пор, пока тележка 21 не подходит к месту останова на нижней ступени скорости. Нижняя ступень скорости такова, что при отключении двигателя 16 тормоз 17 обеспечивает останов тележки 21 с заданной точностью. По окончании цикла точного останова усилители 11 и 12 через элемент 13 И-НЕ и блок 14 задержки воздействуют на триггер 7, ч/ который переключает коммутатор 8 каналов со второго канала на первый ,т.е. из режима точного останова в обычный режим.Отправка тележки к исходной позиции выполняется по команде операции, например сталкивания груза. При этом блок 20 выполнения программ снимает команды с активного формирователя 9.3 команд на останов и формирователя 18 команд на отправку и подает команду на активный формирователь 9.1 для осуществления остановки у исходной позиции. Поскольку датчики 2 и 3 реверса воздействуют на усилители 11 и 12 мощности только через второй канал коммутатора 8 каналов, т.е. после срабатывания датчика 6 отключбния от активного формирователя, то пассивный формирователь команд на останов может быть выполнен в виде металлического копира.
Формула изобретения
Устройство для точного адресования передаточной тележки, содержащее размещенные на тележке блок реализации останова, включающий в себя датчик отключения, датчики реверса и элементы памяти, соединенные каждый одним из входов и выходов с одним из датчиков реверса, а другим входом - с датчиком отключения, коммутатор каналов, выходы которого через усилители мощности сое7 :7789
динены do входами блока программного пуска, связанного с электродвигателем тележки, один из входов соединен с датчиком отправки, другой - с триггером, соединенным одним из входов с выходом блюка задержки, а третий и четвертый с датчиками реверса блока реализащш останова, и размещенные на позициях адресования пассивные формирователи команд на останов и формирователь команд на отправку, соединенный беспpoвoдньnvI каналом связи с датчиком отправки, отличающееся тем, что, с целью повышения надежности работы, оно снабжено размещенным на тележке элементом И-НЕ, входы которого соединены с выходами усилителей мощности, а выход - со входом блока задержки, и размещенными на позициях адресования: блоком набора программ и
3
соединенными с. его выходами активными форм фователями команд на останов, соединенными, беспроводными каналами связи с датчиком отключения, один и другой выходы которого соединены соответственно с пятьм входом коммутатора каналов и npyriDvi входом триггера, причем пассивные форм1фователи команд на остдцов соединены беспроводными канадa и связи с датчиками реверса блока реализации останова.
Источники информации, принятые во внимание при экспертизе, 1. Авторское свидетельство СССР № 281251, кл, В 65G 47/1О, 19.03.69.
2. Авторское свидетельство СССР № 521197, кл. В 65 Q 47/46, 25,04,75 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для точного адресования передаточной тележки | 1975 |
|
SU521197A1 |
| Устройство для точного адрессования электропередаточной тележки | 1976 |
|
SU596518A1 |
| Устройство программного адресования транспортного средства | 1983 |
|
SU1113337A1 |
| Устройство для управления движением транспортного средства | 1986 |
|
SU1317401A1 |
| Устройство для управления движением транспортного средства | 1989 |
|
SU1735809A2 |
| Устройство для управления автоматическими транспортными средствами | 1983 |
|
SU1101841A1 |
| Система автоматического управления транспортным средством по трассе-ориентиру | 1988 |
|
SU1543524A1 |
| Устройство для автоматического адресования объекта | 1975 |
|
SU640915A1 |
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| Устройство для отладки микроЭВМ | 1985 |
|
SU1410708A1 |

