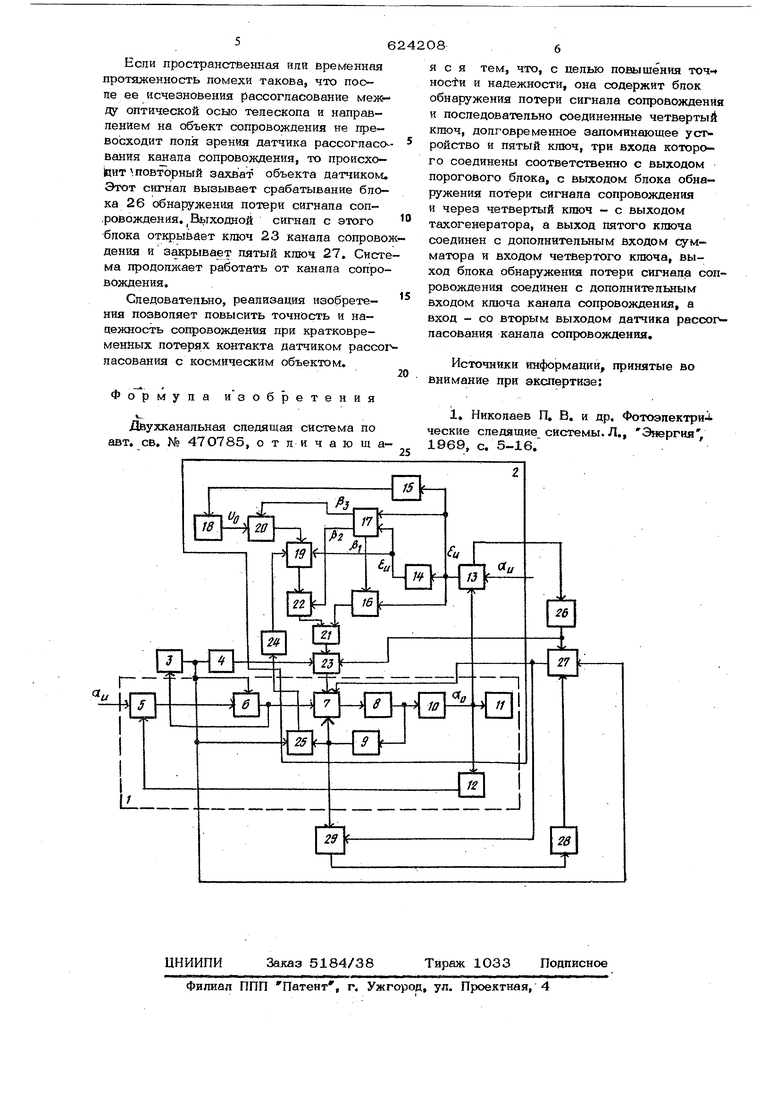
2 кточ - с выходом тахогенератора, а выход пятого кпюча соединен с дополнитеп ным входом сумматора и входом четвертого ключа, выход блока обнаружения потери сигнала сопровождения соединен с дополнительным входом ключа канала соп ровождения, а вход - со вторым выходом датчика рассогласования канала сопровож дения. На чертеже представлена блок-схема описываемой системы, Она содержит следящий канал 1, канал 2,сопровождении, пороговый блок 3 и схем НЕ 4, Следящий канад 1 состоит из датчиков. .5 рассогласования, кпюча 6 канала слежения, сумматора 7, силоВого блока 8, датчика 9 скорости, ред5 ктора 10, нагрузки 11 и датчика 12 главной обрат ной связи. Канал 2 сопровождения -состо ит из датчика 13 рассогласования канала сопроволадения, дифференциатора 14, блока 15.сигнатуры,первогЬ ключа 16, логического устройс1-ва 17, блока 18 эталонных сигналов, сумматора 19, второго ключа 2.0, схемы ИЛИ 21, третьего ключа 22,, ключа 23 канала сопровождения, запоминающего устройства 24 дополнитедьного ключа 25, Кроме того, двухканальная следящая система содержи блок 26 обнаружения потери сигнала сопровождения, пятый ключ 27, долговре менное запоминающее устройство28 и четвертый ключ 29, Принцип действия данной схемы состоит в том, что в зависимости от величин ощибки сопровождения (H ) и скорости ее изменения ( , ) изменяется структура канала 2 сопровож дения с целыо отработки, начальных ошибок и И fiji до допустимых величин ) Д и (ЕЙ л °Р которых Возможно переключение.; на структуру .сопровождения (С) без опасности срыва сопровождения. Переключение структуры канала 2 обеспечивается сигналами -в- 2 ФоР мируемыми в логическом устройстве 17 (Р-т,Эг,Рз)Р 11ем . о при / f и / д , -6- 1 при / ц / д, €12 О при / Нд, -е-.2 1 при / „ / д. Струкгура Cg о бесиеч1тает отработ1су оишбки „ Д9, величины д со скоростью изменения , не превышающей критическую (5jfp), но близкую к ней; это достигается за счет того, что ( UQ ) где макснма7 ьная динамичгеская .ошибка спедяшего контура С . Условие €кр с легко выполнимо Сигнал с выхода устройства 24 постоянную составляющую скорости вращения, которую имела исполнительная ось в момент запирания ключа 6 канала слежения. Структура С, отличается от структуры С тем, что сигнал (J о отключен. При этом происходит отработка ошибки по скорости и При одновременном выполнении условий W происходит переключение на режим отработки воздействия ci-ц (структура С). В этом случае, когда на четвертый эход сумматора 7 сигнал от долговременного запоминающего устройства 28 не поступает, на пятый ключ 27 подаются сигналы запрета либо с порогового блока 3, либо с блока 26 обнаружения потери сигнала сопровождения либо того и другого одновременно. При переходе с режима слежения на режим сопровождения пороговое устройство 3 вырабатывает сигнал, 1соторый подготавливает кшоч 27 к работе. При сопровождении объекта через открытый четвертый кшоч 29 на вход долговременного запоминающего устройства 28 поступает сигнал с датчика 9, скорости , пропорциональный скорости сопровождения, и запоминается им. При наличии контакта датчика рассогласования-канала 2 сопpoвoждeн ffl с космическим объектом с выхода блока 26 обнаружения потери сигнала сопровождения на,второй вход пятого ключа 27поступает сигнал запрета, и он закрывается дпя сигнала, поступающего с долговременного запоминающего устройства 28. При потере контакта позиционным датчиком канала 2 сопровождения с космическим объектом блок 26 обнаружения потери сигнала сопроволодения вырабатывает сигнал, который закрывает ключ 23 канала сопровождения и открывает, пятый ключ 27. Сигнал с выхода пятого кгпоча 27 закрывает четвертый ключ 29, Сопровождение объекта производится по сигналу от долговременного запоминающего устройства 28, который через открытый пятый ключ 27 поступает на четвертый вход сумматора, 7. Таким образом, слежение за обт ектом не прекращается. Скорость сопровождения объекта остается такой, какой она была в момент потери контакта датчиком рассогласования канала сопровождения с космическим объектом. Задатчиком ско рости в это время явшется допговремен кое запоминающее услройство 28, 5 Если пространственная или временная протяженность помехи такова, что после ее исчезновения рассогласование между оптической осью телескопа и направлением на объект сопровождения не превосходит поля зрения датчика paccoглaco вания канала сопровождения, то происхо |дит повторный захват объекта датчиком. Этот сигнал вызывает срабатывание блока 26 обнаружения потери сигнала соп,ровождения. Вьтходной сигнал с этого блока открывает кпюч 23 канала сопрово дения и закрывает пятый ключ 27. Сист ма продолжает работать от канала сопро вождения. Следовательно, реализация изобретения позволяет повысить точность и нацежность сопровождения при кратковременных потеря х контакта датчиком рассо ласования с космическим объектом. Формула изобретения Дзухканальная следящая система по авт. св. № 47 О7 85, о т л и ч а ю щ а 08: Я С Я тем, что, с целью повышения точ- и надежности, она содержит блок обнаружения потери сигнала сопровождения и последовательно соединенные четвертый ключ, долговременное запоминающее уст ройство и пятый ключ, три входа которо го соединены соответственно с выходом порогового бпока, с выходом блока обнаружения потери сигнала сопровождения и через четвертый ключ - с выходом тахогенератора, а выход пятого ключа соединен с дополнительным входом сумматора и входом четвертого ключа, выход блока обнаружения потери сигнала сопровождения соединен с дополнительным входом ключа канала сопровождения, а вход - со вторым выходом датчика рассогласования канала сопровождения. Источники информации, принятые во внимание при экспертизе: 1. Николаев П. В. и др. Фотоэлектри4. ческие следящие системы. Л., Энергия 1969, с. 5-16.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| Дфухканальная следящая система | 1980 |
|
SU954923A2 |
| Двухканальная следящая система | 1974 |
|
SU487375A1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И ЦИФРОВАЯ ТЕЛЕВИЗИОННАЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2440691C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ | 2000 |
|
RU2172010C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2079148C1 |
| Двухканальная следящая система | 1973 |
|
SU470785A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
