(21)4175839/25-11
(22)06.01.87
(46) 23.12.88.БЮЛ. № 47
(71)Херсонский филиал Всесоюзного профстно-конструкторского института автоматизированных транспортно-склад- ских систем
(72)М.Ю.Лавренов, А.А.Молчанов и Ю.А.Ушомирский
(53)621.876.113(088.8)
(56)Авторское свидетельство СССР 626000, кл. В 66 В 9/06, 1977.
(54)ПОДЪЕМНО-ТРАНСПОРТНАЯ СИСТЕМА
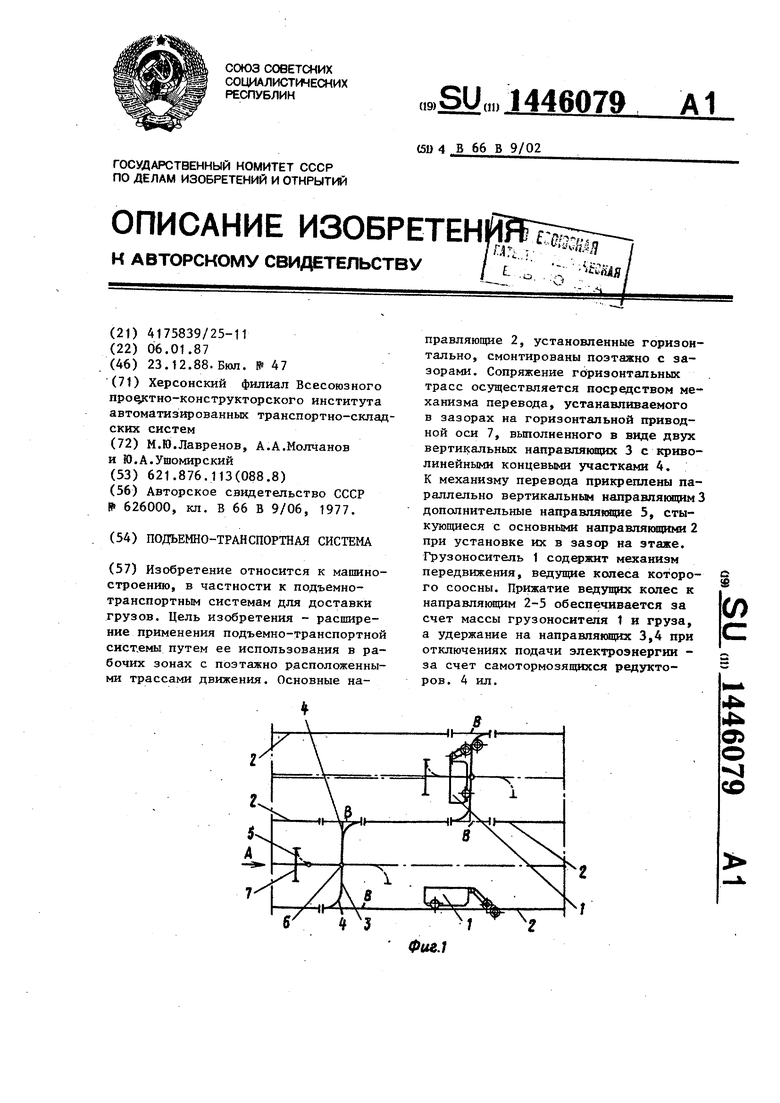
(57)Изобретение относится к машиностроению, в частности к подъемно- транспортным системам для доставки грузов. Цель изобретения - расширение применения подъемно-транспортной системы путем ее использования в рабочих зонах с поэтажно расположенными трассами движения. Основные направляющие 2, установленные горизонтально, смонтированы поэтажно с зазорами. Сопряжение горизонтальных трасс осуществляется посредством механизма перевода, устанавливаемого в зазорах на горизонтальной приводной оси 7, выполненного в виде двух вертикальных направлякицих 3 с криволинейными концевыми участками 4. К механизму перевода прикреплены параллельно вертикальным направлянмцим3 дополнительные направлякяцие 5, стыкующиеся с основными направлякнцими 2 при установке их в зазор на этаже. Грузоноситель 1 содержит механизм передвижения, ведущие колеса которого соосны. Прижатие ведущих копес к направлякщим 2-5 обеспечивается за счет массы грузоноситепя 1 и груза, а удержание на направляющих 3,4 при отключениях подачи электроэнергии - за счет самотормозяпдахся редукторов. А ил.
(Л
4
а о
Изобретение относится к машиностроению, в частности к подъемно- транспортным системам для доставки грузов.
Целью изобретения является расширение области ;применения подъемно- транспортной системы путем ее использования в рабочих зонах с поэтажно расположенными трассами движения.
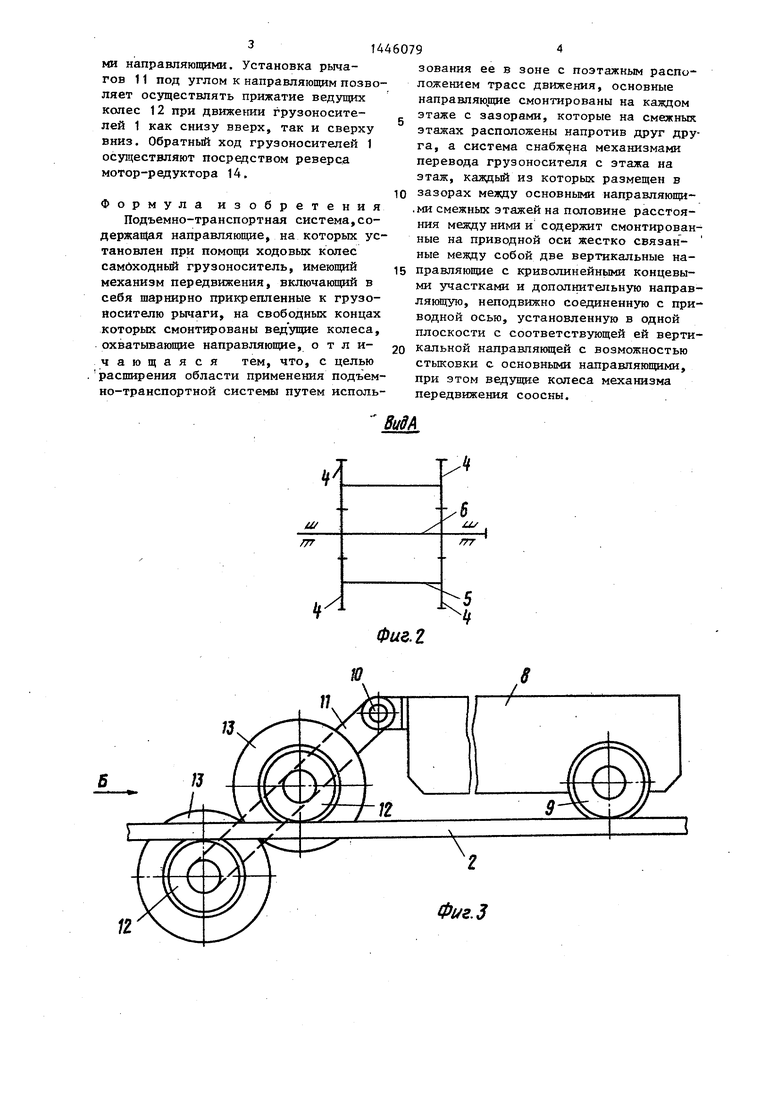
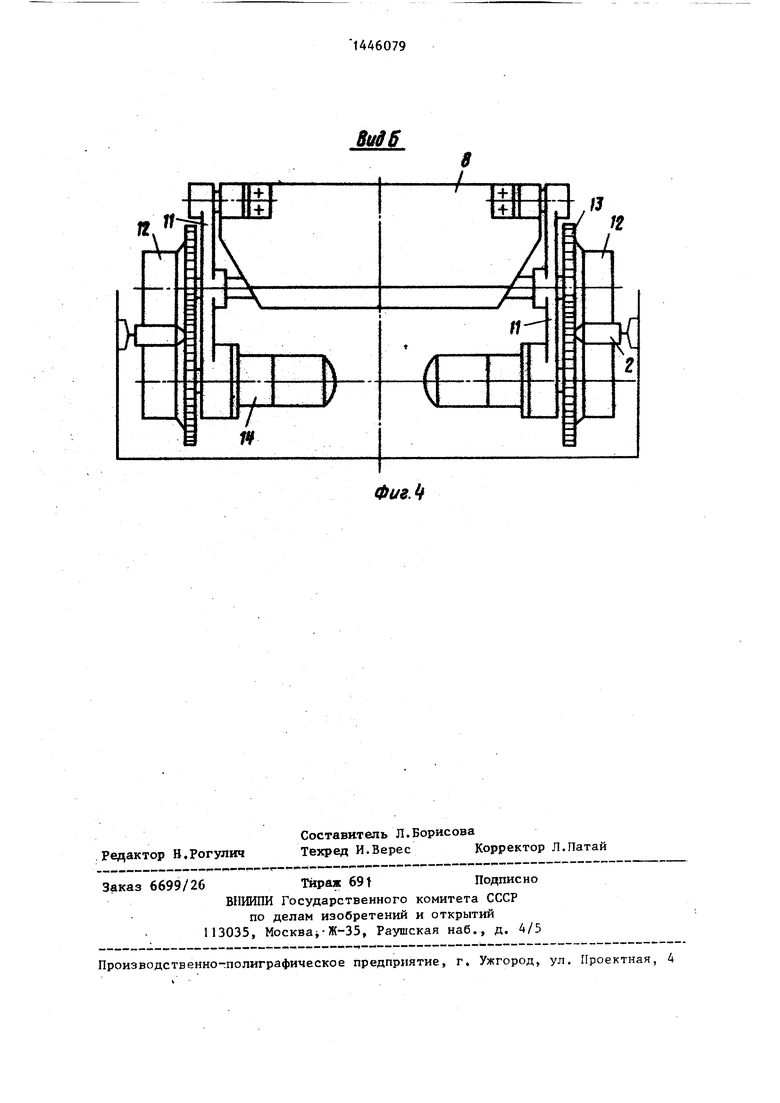
На фиг.1 изображена;подъемно-транспортная система, вид сбоку; на фиг.2 - вид А на фиг.1; на фиг.З - самоходный грузоноситель, вид сбоку на фиг.4 - вид Б на 4ннг.З.
Система содержит направляющ1е, вьн полненные в виде рельсовой колеи, и самоходные грузоноси тели. Направленность движения грузоносителей 1 в рабочей зоне обеспечивается направляющими трех видов; основными направ- лякяцими 2, вертикальными направляющими 3 с криволинейными концевыми участками 4 и дополнительными направляющими 5. Основные направляющие 2 смонтированы поэтажно и на каждом этаже имеют зазор В, Зазоры В на смежных этажах расположены друг против друга. В зазорах В на горизонтальной приводной оси 6, проходящей посере- дине междуэтажного пространства, установлен механизм перевода грузоноси- теля 1 с этажа на этаж, который выполнен в виде пары ;.естко связанных между собой вертикапьных направляю- щих 3 с криволинейными участками 4, К механизму перевода со стороны рабочей зоны параллельно вертикальным направляющим 3 на расстоянии, равном половине междуэтажного пространства посредством стержней 6 и 7 прикреплены дополнительные направляющие 5. Грузоноситель 1 содержит кузов 8 с ходовыми колесами 9 и механизм передвижения, которьй выполнен в виде прикрепленной к кузову 8 посредством подвижных шарниров f0 пары рычагов It на свободном конца каждого из которых смонтирована пара охватывающих головку рельсовых направляющих веду- щих колес 12. Оси каждой пары ведущих колес 12 соединены цилиндрическими зубчатыми шестернями 13, при этом ось одного из колес 12 Соединена с фланцевым мотрр-редуктором 14, который содержит электродвигатель и самотормозящийся, например, червячный редуЛтор. Мотор-редукторы 14 укреплены на рычагах t1.. Для обеспечения устойчивости грузоносителя 1 ведущие колеса вьшолнены однореборд- ными, причем реборды колес заведены за головку рельсовых направляющих,чт предохраняет грузоноситель от схода с направляющих 2-4 и 6.
Система работает следующим образом.
В исходном положении направляющие 2 разомкнуты на этаже. Устройство перевода грузоносителей 1 с этажа на этаж расположено так, что направляющие 2 смежных этажей соединены посредством вертикальных направляющих 3 и переходных кривых 4. В таком положении грузоносители 1 могут выходить на выше расположенный этаж или опускаться на нижний этаж.
После выхода грузоносителя 1 на запланированный этаж устройство перевода устанавливают путем его поворота на 90° в положение, при котором зазор в основных направляющих 2 перекрыт дополнительными направляющими 6, Хаким образом приводят в готовность поэтажную трассу движения. Грузоноситель 1 перемещается по направляющим 2-4 и б при помощи колес 12. Прижатие ведущих колес 12 к направляющим 2-4 и 6 обеспечивают за счет массы гру- зоносителя 1 и транспортируемого на нем груза. При этом груэонесущие плечи рычагов 11 механизма перемещения стремятся повернуться в направлении кузова 8 грузоносителя 1, а ведущие колеса 12, установленные на рычагах 11 попарно и охватываю1ще головки направляющих, прижимаются к ним и пр встречном вращении реализуют тяговое усилие, обеспечивающее движение грузоносителя 1. Удержание самоход- ньк грузоносителей 1 на направляющих 3 и 4 при запланированных или аварийных отключениях подачи электроэнергии на приводы механизма перемеще ния осуществляется за счет самотормозящихся редукторов, входящих в соста мотор-редукторов 14. Устойчивость грузоносителей 1 и направленность их движения обеспечивается за счет реборд ходовых 9 и ведущих 12 колес. Компенсация игры колеи обеспечивается за счет установки ходовых колес 9 с учетом ее величины. Износ ведущих колес 12 и направляющих 2-4 и 6 компенсируется посредством изменения угла между рычагами 11 и рельсовыми направляющими. Установка рычагов 11 под углом к направляющим позволяет осзтцествлять прижатие ведущих колес 12 при движe даи грузоносите- лей 1 как снизу вверх, так и сверху вниз. Обратный код грузоносителей 1 осуществляют посредством реверсд мотор-редуктора 14.
Формула изобретения Подъемно-транспортная система,со- держап ая направляющие, на которых установлен при помощи ходовых колес самбходный грузоноситель, имеющий механизм передвижения, включающий в себя шарнирно прикрепленные к грузо- носителю рычаги, на свободных концах которьк смонтированы вед ущие колеса, охватьшающие направляющие, отличающаяся тем, что, с целью асширения области применения подъемо-транспортной системы путем исполь144
6079
зования ее в зоне с поэтажным расположением трасс движения, основные направляюп1ие смонтированы на каждом этаже с зазорами, которые на смежных этажах расположены напротив друг друга, а система снабжена механизмами перевода грузоносителя с этажа на этаж, каждьй из которых размещен в
10 зазорах меязду основными направляющи- .ми смежных этажей на половине расстояния между ними и содержит смонтированные на приводной оси жестко связанные между собой две вертикальные на15 правляющие с криволинейными концевыми участками и дополнительную направляющую, неподвижно соединенную с при- водной осью, установленную в одной плоскости с соответствующей ей верти20 калькой направляющей с возможностью стьпсовки с основными направляющими, при этом ведущие колеса механизма передвижения соосны.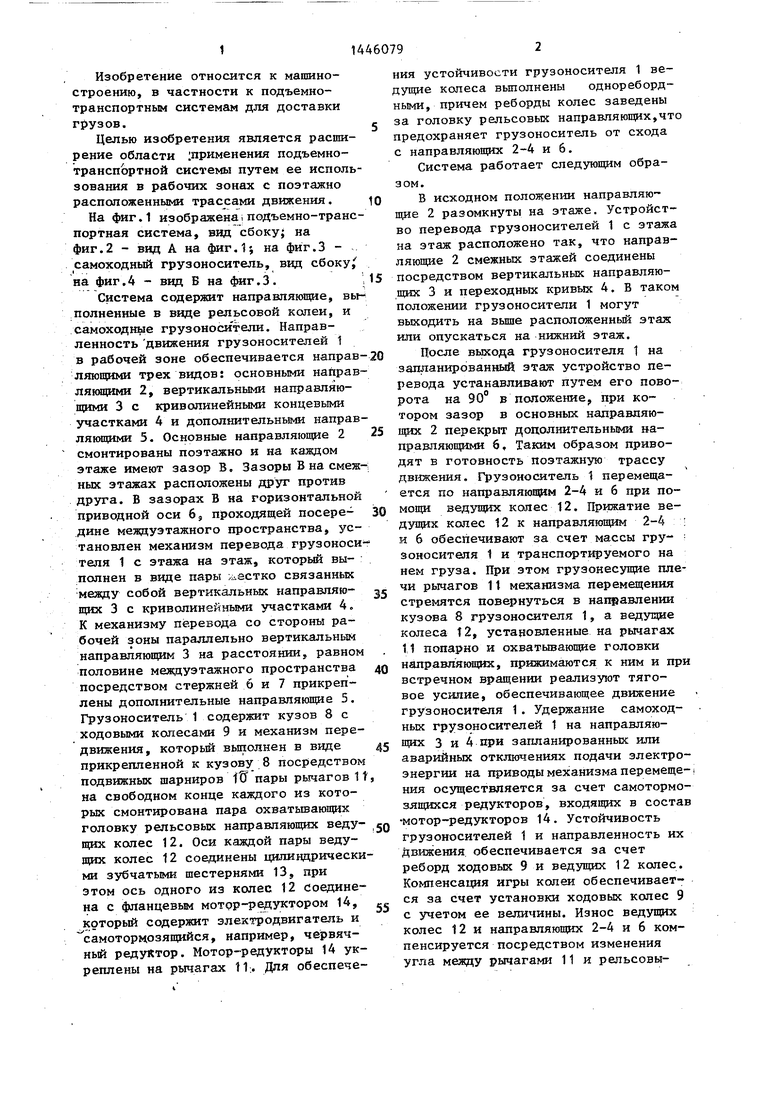
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемно-транспортная система | 1988 |
|
SU1562275A1 |
| Подъемно-транспортная система | 1978 |
|
SU775034A1 |
| Подъемно-транспортная система | 1986 |
|
SU1418246A1 |
| Бесканатный подъемник | 1987 |
|
SU1446080A1 |
| Подъемно-транспортная установка | 1976 |
|
SU612885A1 |
| ТРАНСПОРТНАЯ СИСТЕМА | 2002 |
|
RU2226473C2 |
| Клетьевой подъемник | 1982 |
|
SU1063760A1 |
| Конвейер | 1985 |
|
SU1305069A1 |
| Пространственный конвейер | 1982 |
|
SU1058837A1 |
| Наклонный подъемник | 1977 |
|
SU626000A1 |
/77
.Л
к;
---«
Фиг. 2
13
т
6
/Z/
/77
к;
--«
Ф1/г.З
Фиг.
