(2J) 4451479/25-11
(22) 01.07.88
(46) 07.05.90. Бюл. № 17
(71)Херсонский филиал Всесоюзного научно-исследовательского и проектно-конструк- торского института атомного энергетического машиностроения
(72)М. Ю. Лавренов, А. А. Молчанов и Ю. А. Ушомирский
(53)621.867(088.8)
(56)Авторское свидетельство СССР № 1446079, кл. В 66 В 9/02, 1987.
(54)ПОДЪЕМНО-ТРАНСПОРТНАЯ СИСТЕМА
(57)Изобретение относится к машиностроению, в частности к подъемно-транспортным системам для доставки грузов в рабочих зонах с поэтажным расположением трасс. Целью изобретения является повышение производительности транспортировки грузов в рабочих зонах с поэтажным расположением трасс. Подъемно-транспортная система содержит размещенные поэтажно горизонтальные направляющие 2, на которых посредством ходовых колес установлен самоходный грузоноситель 1, имеющий механизм передвижения, включающий шарнирно при- креплейные к грузоносителю рычаги, на свободных концах которых соосно смонтированы ведущие колеса, охватывающие направляющие, механизмы перевода грузо- носителя с этажа на этаж, установленные на приводной оси. Горизонтальные направляющие 2 имеют зазоры, которые на смежных этажах расположены один напротив другого. Система снабжена вертикальными направляющими 3, установленными неподвижно с вертикальными зазорами между этажами в местах перехода грузо- носителя с этажа на этаж. Приводная ось каждого механизма перевода размещена в точке пересечения осей вертикальной и горизонтальной направляющих. Механизм перевода снабжен смонтированными на приводной оси двумя прямолинейными и двумя криволинейными направляющими. 5 ил.
«
(Л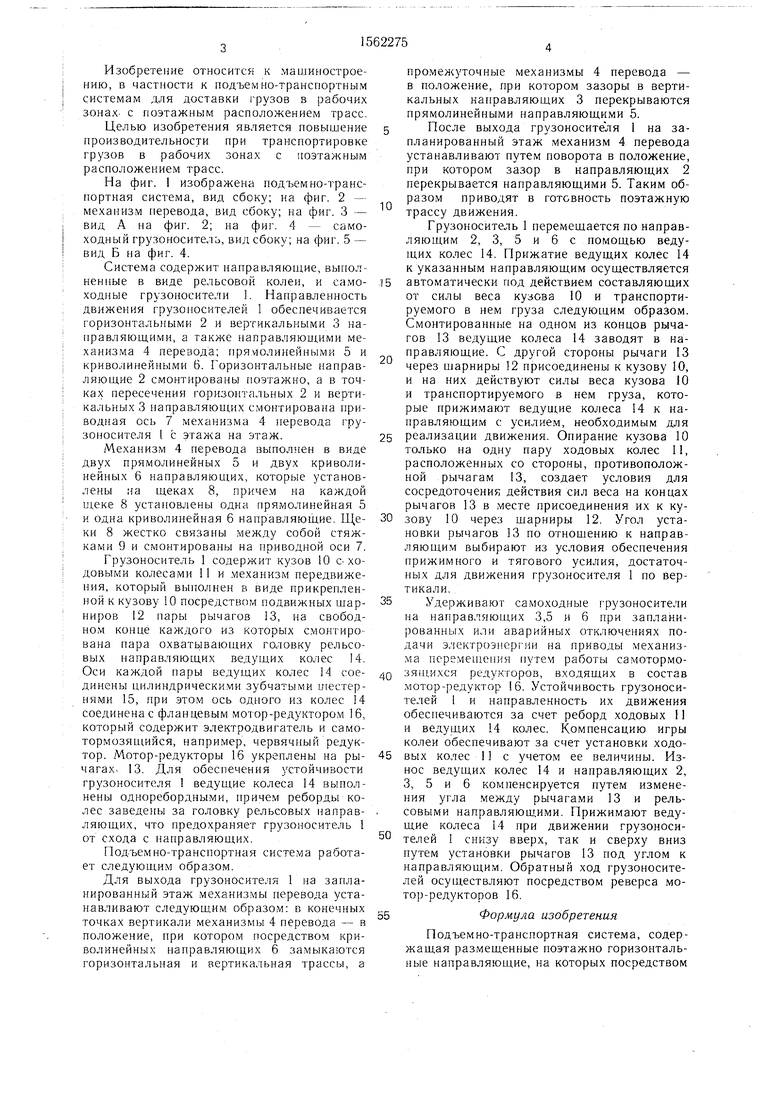
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемно-транспортная система | 1987 |
|
SU1446079A1 |
| Подъемно-транспортная система | 1986 |
|
SU1418246A1 |
| Подъемно-транспортная система | 1978 |
|
SU775034A1 |
| Бесканатный подъемник | 1987 |
|
SU1446080A1 |
| Наклонный подъемник | 1977 |
|
SU626000A1 |
| Пространственный конвейер | 1982 |
|
SU1058837A1 |
| Вертикально-замкнутый тележечный конвейер | 1981 |
|
SU982992A1 |
| Конвейер для штучных грузов | 1983 |
|
SU1139678A1 |
| Подъемно-транспортная установка | 1976 |
|
SU612885A1 |
| ТРАНСПОРТНАЯ СИСТЕМА | 2002 |
|
RU2226473C2 |
Изобретение относится к машиностроению, в частности к подъемно-транспортным системам для доставки грузов в рабочих зонах с поэтажным расположением трасс. Целью изобретения является повышение производительности транспортировки грузов в рабочих зонах с поэтажным расположением трасс. Подъемно-транспортная система содержит размещенные поэтажно горизонтальные направляющие 2, на которых посредством ходовых колес установлен самоходный грузоноситель 1, имеющий механизм передвижения, включающий шарнирно прикрепленные к грузоносителю рычаги, на свободных концах которых соосно смонтированы ведущие колеса, охватывающие направляющие, механизмы перевода грузоносителя с этажа на этаж, установленные на приводной оси. Горизонтальные направляющие 2 имеют зазоры, которые на смежных этажах расположены один напротив другого. Система снабжена вертикальными направляющими 3, установленными неподвижно с вертикальными зазорами между этажами в местах перехода грузоносителя с этажа на этаж. Приводная ось каждого механизма перевода размещена в точке пересечения осей вертикальной и горизонтальной направляющих. Механизм перевода снабжен смонтированными на приводной оси двумя прямолинейными и двумя криволинейными направляющими. 5 ил.
ел
о
Ю 1C
ел
Фиг.1
Изобретение относится к машиностроению, в частности к подъемно-транспортным системам для доставки грузов в рабочих зонах с поэтажным расположением трасс
Целью изобретения является повышение производительности при транспортировке грузов в рабочих зонах с поэтажным расположением трасс.
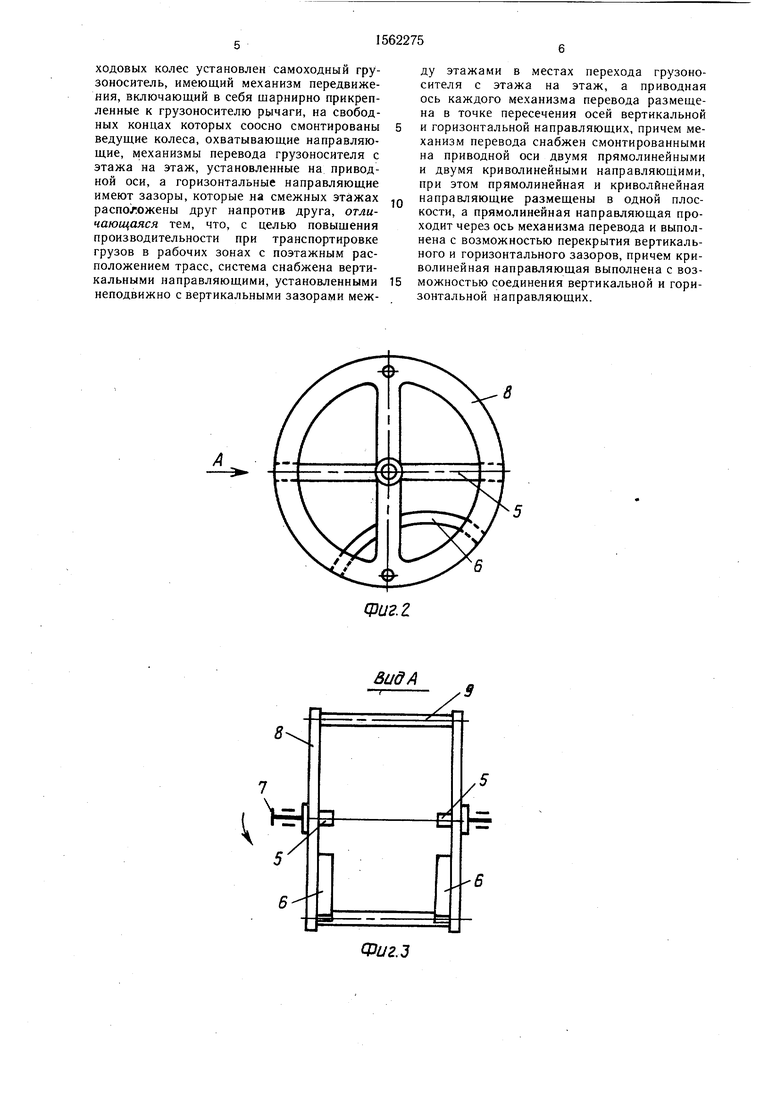
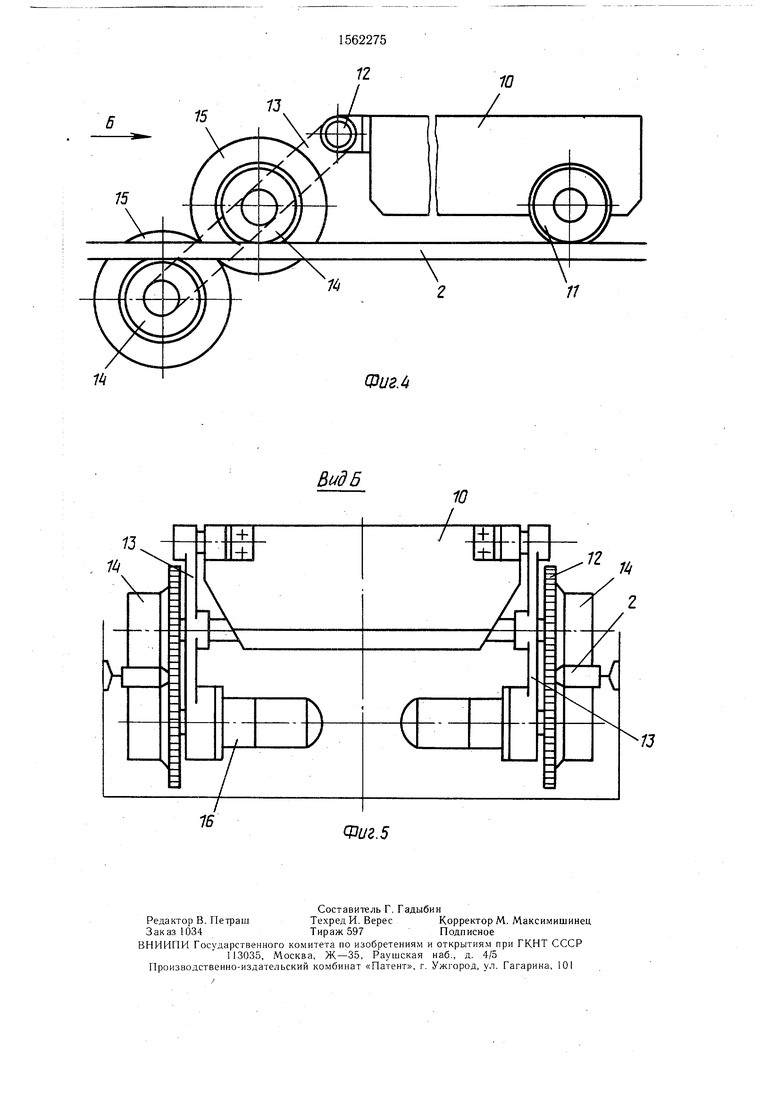
На фиг. 1 изображена подъемно-транспортная система, вид сбоку; на фиг. 2 - механизм перевода, вид сбоку; на фиг. 3 - вид А на фиг. 2; па фиг. 4 - самоходный грузоноситель, вид сбоку; на фиг. 5 - вид Б на фиг. 4.
Система содержит направляющие, выпол ненные в виде рельсовой колеи, и самоходные грузоносители 1. Направленность движения грузоносителей 1 обеспечивается горизонтальными 2 и вертикальными 3 направляющими, а также направляющими механизма 4 перевода; прямолинейными 5 и криволинейными 6. Горизонтальные направляющие 2 смонтированы поэтажно, а в точках пересечения горизонтальных 2 и вертикальных 3 направляющих смонтирована приводная ось 7 механизма 4 перевода гру- зоносителя I с этажа на этаж.
Механизм 4 перевода выполнен в виде двух прямолинейных 5 и двух криволинейных 6 направляющих, которые установлены на щеках 8, причем на каждой щеке 8 установлены одна прямолинейная 5 и одна криволинейная 6 направляющие Щеки 8 жестко связаны между собой стяжками 9 и смонтированы на приводной оси 7.
Грузоноситель 1 содержит кузов 10 с ходовыми колесами 11 и механизм передвижения, который выполнен в виде прикрепленной к кузову 10 посредством подвижных шарниров 12 пары рычагов 13, на свободном конце каждого из которых смонгиро вана пара охватывающих головку рельсовых направляющих ведущих колес 14 Оси каждой пары ведущих колес 14 соединены цилиндрическими зубчатыми шестернями 15, при этом ось одного из колес 14 соединена с фланцевым мотор-редуктором 16, который содержит электродвигатель и самотормозящийся, например, червячный редуктор. Мотор-редукторы 16 укреплены на рычагах. 13. Для обеспечения УСТОЙЧИВОСТИ грузоносителя ведущие колеса 14 выполнены одноребордными, причем реборды колес заведены за головку рельсовых направляющих, что предохраняет грузоноситель 1 от схода с направляющих.
Подъемно-транспортная система работает следующим образом.
Для выхода грузоносителя 1 на запланированный этаж механизмы перевода устанавливают следующим образом: в конечных точках вертикали механизмы 4 перевода - в положение, при котором посредством криволинейных направляющих 6 замыкаются горизонтальная и вертикальная трассы, а
0
0
промежуточные механизмы 4 перевода - в положение, при котором зазоры в вертикальных направляющих 3 перекрываются прямолинейными направляющими 5.
После выхода грузоносителя 1 на запланированный этаж механизм 4 перевода устанавливают путем поворота в положение, при котором зазор в направляющих 2 перекрывается направляющими 5. Таким образом приводят в готовность поэтажную трассу движения.
Грузоноситель 1 перемещается по направляющим 2, 3, 5 и 6 с помощью ведущих колес 14. Прижатие ведущих колес 14 к указанным направляющим осуществляется
5 автоматически под действием составляющих от силы веса кузова 10 и транспортируемого в нем груза следующим образом. Смонтированные на одном из концов рычагов 13 ведущие колеса 14 заводят в направляющие. С другой стороны рычаги 13 через шарниры 12 присоединены к кузову 10, и на них действуют силы веса кузова 10 и транспортируемого в нем груза, которые прижимают ведущие колеса 14 к направляющим с усилием, необходимым для
5 реализации движения. Опирание кузова 10 только на одну пару ходовых колес 11, расположенных со стороны, противоположной рычагам 13, создает условия для сосредоточения действия сил веса на концах рычагов 13 в месте присоединения их к ку0 зову 10 через шарниры 12. Угол установки рычагов 13 по отношению к направляющим выбирают из условия обеспечения прижимного и тягового усилия, достаточных для движения грузоносителя 1 по вертикали.
5Удерживают самоходные грузоносители
на направляющих 3,5 и 6 при запланированных или аварийных отключениях подачи электроэнергии на приводы механизма перемещения путем работы самотормо0 зящихся редукторов, входящих в состав мотор-редуктор 16. Устойчивость грузоносителей 1 и направленность их движения обеспечиваются за счет реборд ходовых 11 и ведущих 14 колес. Компенсацию игры колеи обеспечивают за счет установки ходо5 вых колес 11 с учетом ее величины. Износ ведущих колес 14 и направляющих 2, 3, 5 и 6 компенсируется путем изменения угла между рычагами 13 и рельсовыми направляющими. Прижимают ведущие колеса 14 при движении грузоноси0 телей 1 снизу вверх, так и сверху вниз путем установки рычагов 13 под углом к направляющим. Обратный ход грузоносителей осуществляют посредством реверса мотор-редукторов 16.
5Формула изобретения
Подъемно-транспортная система, содержащая размещенные поэтажно горизонтальные направляющие, на которых посредством
ходовых колес установлен самоходный гру- зоноситель, имеющий механизм передвижения, включающий в себя шарнирно прикрепленные к грузоносителю рычаги, на свободных концах которых соосно смонтированы ведущие колеса, охватывающие направляющие, механизмы перевода грузоносителя с этажа на этаж, установленные на приводной оси, а горизонтальные направляющие имеют зазоры, которые на смежных этажах расположены друг напротив друга, отличающаяся тем, что, с целью повышения производительности при транспортировке грузов в рабочих зонах с поэтажным расположением трасс, система снабжена вертикальными направляющими, установленными неподвижно с вертикальными зазорами между этажами в местах перехода грузоносителя с этажа на этаж, а приводная ось каждого механизма перевода размещена в точке пересечения осей вертикальной и горизонтальной направляющих, причем механизм перевода снабжен смонтированными на приводной оси двумя прямолинейными и двумя криволинейными направляющими, при этом прямолинейная и криволинейная направляющие размещены в одной плоскости, а прямолинейная направляющая проходит через ось механизма перевода и выполнена с возможностью перекрытия вертикального и горизонтального зазоров, причем криволинейная направляющая выполнена с возможностью соединения вертикальной и горизонтальной направляющих.
Фиг. I
видА
3
Фиг.З
ЬидБ
13
tt
11
Фигм
/
