В СВЯЗИ С развитием техники автоматического управления и регулирования технологии производственных процессов в настоящее время получили широкое распространение симпатические и следящие системы управления электроприводами.
Симпатической системой управления электроприводом называют такое управление, при котором движение исполнительного механизма точно следует за направлением движения управляющей им. рукоятки (передатчиком) и каждый поворот передатчика па определенный угол сопровождается поворотом (или линейным перемещением) исполнительного механизма в ту же сторону и на соответствующий угол; в состоянии покоя системы положение исполнительного механизма соответствует положению передатчика.
В большинстве подобных систем применяются балансовые и нулевые схемы, основной характеристикой которых является их чувствительность.
Предлагаемое следящее устройство отличается тем, что мост выполнен в виде двух кольцевых замкнутых сопротивлений, соединенных одно с другим в трех точках, отстоящих друг от друга на 120°, и питается от двух жестко соединенных под углом 120° движков, скользящих по одному из сопротивлений.
Кр.оме того, реле включено между движком второго сопротивления и средней точкой потепциометра, к концам которого подключены движки первого сопротивления.
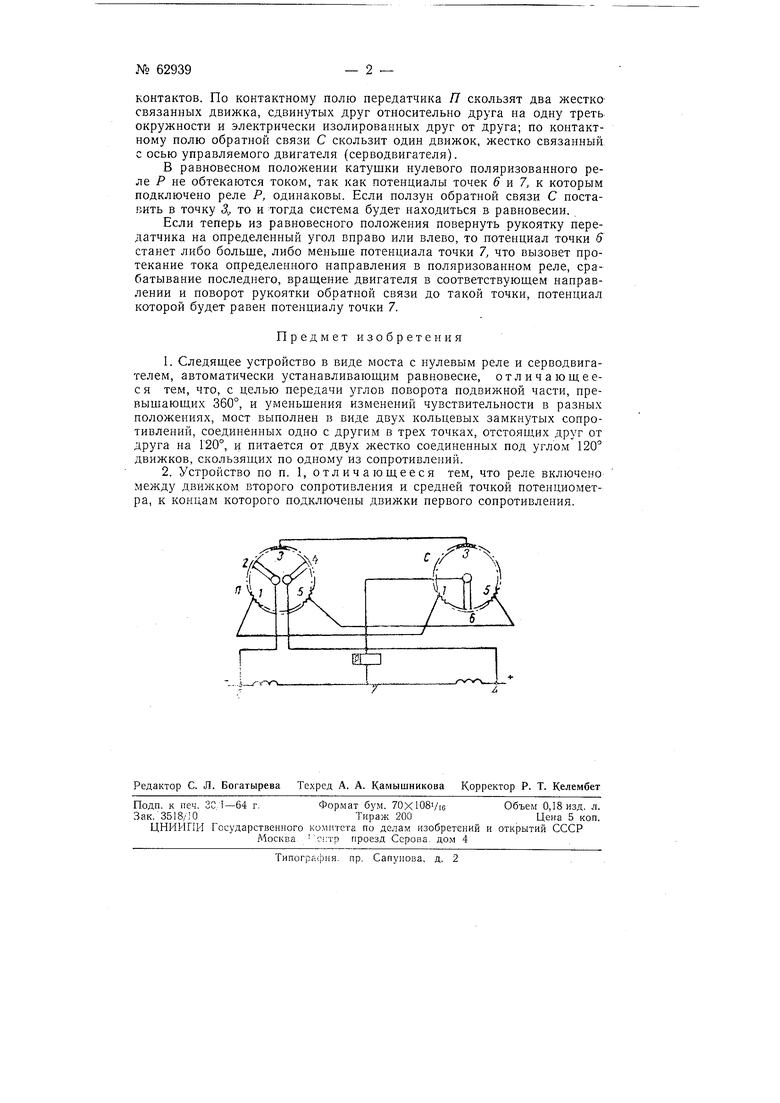
Сущность изобретения поясняется прилагаемым чертежом, на котором показана принципиальная электрическая схема предлагаемого устройства.
В кольцевой схеме автоматического моста в качестве передатчика П и обратной связи С применены реостаты с круглым расположением
контактов. По контактному полю передатчика Я скользят два жесткосвязанных движка, сдвинутых друг относительно друга на одну треть окружности и электрически изолированных друг от друга; по контактному полю обратной связи С скользит один движок, жестко связанный с осью управляемого двигателя (серводвигателя).
В равновесном положении катушки нулевого поляризованного реле Р не обтекаются током, так как потенциалы точек и 7, к которым подключено реле Р, одинаковы. Если ползун обратной связи С поставить в точку „ то и тогда система будет находиться в равновесии.
Если теперь из равновесного положения повернуть рукоятку передатчика на определенный угол вправо или влево, то потенциал точки 6 станет либо больше, либо меньше потенциала точки 7, что вызовет протекание тока определенного направления в поляризованном реле, срабатывание последнего, враш,ение двигателя в соответствуюшем направлении и поворот рукоятки обратной связи до такой точки, потенциал которой будет равен потенциалу точки 7.
Предмет изобретения
1.Следяш;ее устройство в виде моста с нулевым реле и серводвигателем, автоматически устанавливающим равновесие, отличаюш;ееся тем, что, с целью передачи углов поворота подвижной части, превышаюш,их 360°, и уменьшения изменений чувствительности в разных положениях, мост выполнен в виде двух кольцевых замкнутых сопротивлений, соединенных одно с другим в трех точках, отстояш,их друг от друга на 120°, и питается от двух жестко соединенных под углом 120 движков, скользяш,их по одному из сопротивлений.
2.Устройство по п. 1, отличаю ш,ееся тем, что реле включено между движком второго сопротивления и средней точкой потенциометра, к концам которого подключены движки первого сопротивления.
-....
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящее устройство | 1947 |
|
SU73918A2 |
| Следящее устройство | 1948 |
|
SU79630A1 |
| Дифференциальный многооборотный кольцевой реостатный мост | 1955 |
|
SU103338A1 |
| Следящее устройство | 1937 |
|
SU56723A1 |
| УСТРОЙСТВО ДЛЯ СИМПАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1941 |
|
SU67346A1 |
| Устройство для электрического дистанционного управления | 1936 |
|
SU50329A1 |
| АВТОМАТИЧЕСКОЕ РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 1934 |
|
SU45663A1 |
| Следящее устройство | 1937 |
|
SU59433A1 |
| Устройство для моделирования тиристора | 1983 |
|
SU1091190A1 |
| Форматный станок для раскроя щитов | 1960 |
|
SU144277A1 |
