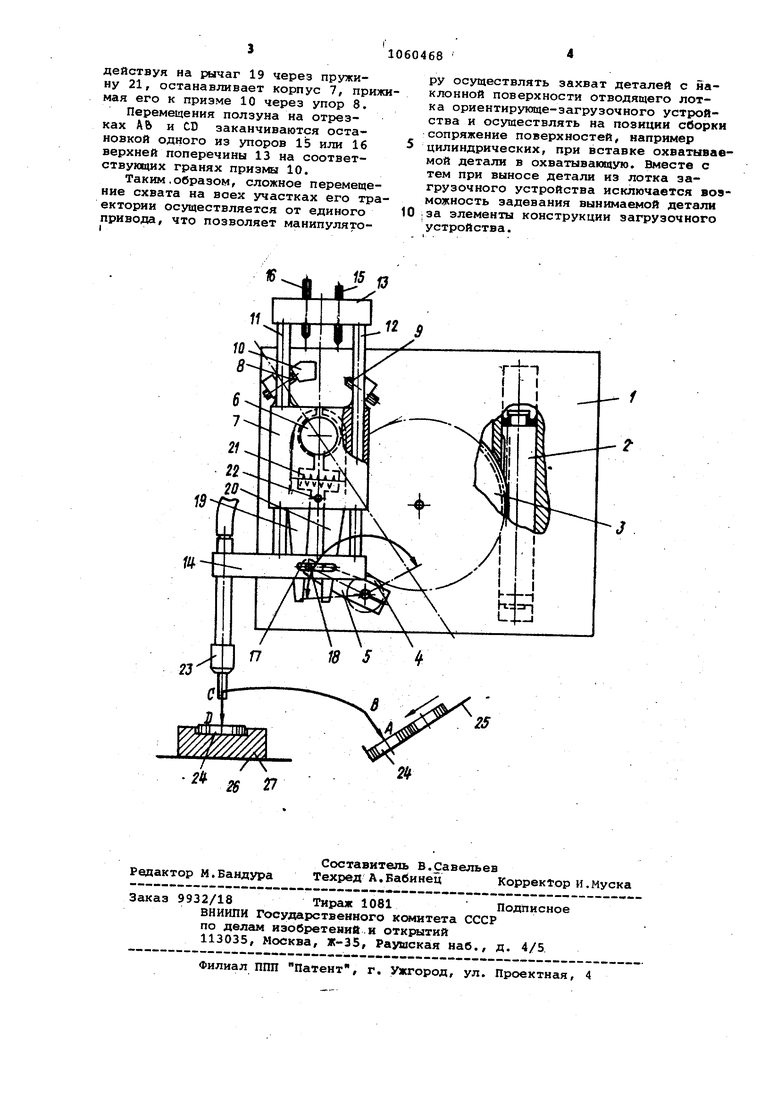
00 Изобретение относится к средствам автоматизации технологических процессов и может быть использовано например в промьшшенных работах, применяемых в приборостроении, в часовой промышленности и других сме ных отраслях. Известен манипулятор для захвата Деталей на загрузочной позиции и пе реноса их в рабочую зону технологической машины, содержащий основание и кривошипно-кулисный механизм, на кулисе которого закреплен схват Однако указанный манипулятор не обеспечивает прямолинейного перемещения схвату на участке выноса дета лей с наклонной загрузочной позиции и на участке установки - на рабочую позицию. Вследствие технологи ческие возможности манипулятора ограничены, так как нельзя осушествлять сопряжение охватываемых и охват вгиощих поверхностей деталей, например при операциях сборки. Целью изобретения является расши рение технологических возможностей манипулятора за счет обеспечения захвата и выноса деталей с наклонно поверхности отводящего лотка загрузочного устройства и сопряжения поверхностей охватываемой и охватываю щей деталей на рабочей позиции. Указанная цель достигается тем, что манипулятор, содержгцдий основан и кривсдиипно-кулисиый механизм, на кулисе которого закреплен схват,снаб жен подпружиненными друг относитель но друга рычагами, шарнирно связанн ми с основанием, а в корпусе кривошипно-кулисного механизма смонтиров упор, предназначенный для взаимодей ствия с этими рычагами. На чертеже изображен предлагаемы манипулятор, общий вид. В неподвижном основании 1 размещен пневмопоршень-рейка 2, который через паразитную шестерню 3 связан с шестерней 4 привода кривошипа 5. На установленной в основании 1 оси смонтирован качающийся корпус 7 кри Вошипно-кулисного механизма, углово перемещение которого ограничивается упорами 8 и 9, вэаимодействукицими с закрепленной на основании 1 призмой 10 В направляющих качающегося корпуса 7 размещен ползун-кулиса, состоящий из двух скалок 11 и 12, связанных поперечинами 13 и 14. В верхней поперечине 13 имеются упо |ш 15 и 16, ограничиваюсоие возвратно-поступательные перемещения полвуна-кулисы относительно корпуса 7. В нижней поперечиие 14 вьтолнен паз 17, в котором расположеи пгшец кривсшипа 5, сообщающий ползуну-кулисе продольное перемещение относительно качающегося корпуса 7. Качательное движение корпуса 7 сообщается тем же пальцем 18 через посредство двух рычагов 19 и 20, которые смонтированы на оси 6 основания 1. Рычаги 19 и 20 стянуты пружиной 21, обеспечивающей поочередный поджим рычагов к запрессованному в корпусе 7 пальцу 22 рупору). Схват 23 манипулятора закреплен на нижней поперечине 14. Манипулятор работает следующим образом. Деталь 24, находящаяся в ориентированном положении в наклонном отводящем лотке 25 ориентирующе-загрузочного устройства (не показана), захватывается, переносится и устанавливается на рабочую позицию 26. При этом схват 23 на отрезке Д Б захвата и на отрезке CD установки перемещается по прямолинейной траектории, а на участке 8С при переносе между позицией захвата и рабочей позицией - по кулисной кривой. В исходном положении при нахождении схвата 23 в точке А палец 18 кривошипа 5, воздействуя на рычаг 20 и пружину 21, прижимает корпус 7 упором 9 к прИзме 10. При повороте кривошипа 5 посредством пневмопоршень-рейки 2 и шестерен 3 и 4 палец 18, взаимодействуя с пазом 17 поперечины 14, сообщает перемещение ползуну-кулисе относительно корпуса 7 до тех пор, пока рычаг 20 не.коснется пальца 22, при этом схват 23, захватив деталь 24 с лотка 25, перемещается в точку & . Затем одновременно с перемещением ползуна-кулисы начинается поворот корпуса 7 до тех пор, пока его упор 8 не встретится с призмой 10, при этом схват 23 перемещается по криволинейной траектории БС , перенося деталь 24 с загрузочной позиции на рабочую. На участке переноса ВС паз в поперечине 14 и направленные друг к другу плоскости рычагов 19 и 20 образуют замкнутый со всех сторон шарнирный охват пальца 19 кривошипа 5, в результате чего ползункулиса, несущий схват 23, совершает сложное движение, представляющее собой сумму двух простых движений; качания корпуса 7 на оси 6 и продольного перемещения ползуна-кулисы в корпусе 7. При дальнейшем повороте кривошипа 5 его палец сообщает через поперечину 14 прямолинейное перемещение ползуна-кулисе вниз (участокCD). ,При перемещении схвата 23 по траектории СО осуществляется сопряжение цилиндрических поверхностей детали 23 и охватывающей ее детали 27, I установленной на рабочей позиции 26. (одновременно с этим палец 18, воз
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1331638A1 |
| Установка для термомеханического упрочнения изделий | 1990 |
|
SU1740454A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438858C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2243083C1 |
| Манипулятор | 1984 |
|
SU1227459A1 |
| Автооператор | 1989 |
|
SU1685675A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2009 |
|
RU2412046C2 |
| Автооператор | 1978 |
|
SU779011A1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| Устройство для укладки предметов в тару | 1983 |
|
SU1138346A2 |
МАНИПУЛЯТОР для захвата деталей на загрузочной позиции и пере- , носа их в рабочую зону технологической машины, содержащий основание н кривошипно-кулисный механизм, на кулисе которого закреплен схват, о тличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения захвата и выноса деталей с наклонной поверхности отводящего лотка загрузочного устройства и сопряжения поверхностей охватываемой и охватывающей деталей на рабочей позиции, он снабжен подпружиненными друг относительно друга рычагами, шарнирно связанными с основанием, а в корпусе кривошипно-кулисного механизма смонтирован упор, предназначенный для взаимодействия с этими рычагами.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гринштейн Я.Г., Вайсман Е.Г | |||
| Системы питания автоматов в приборостроении | |||
| М., Машиностроение, 1966, с.104(прототип). | |||
