Изобретение касается ходовой части сельскохозяйственных машин, йапрймЬр, волокуш, фронтально прицепляемых к трактору и снабженных опорными управляемыми колёсами.
Известны сельскохозяйственные машины с такого рода ходовой частью, в которых поворот управляемых колёс осуществляется через механизм управления трактора. Такая система перегружает механизм управления и затрудняет: работу тракториста.
В ходовой части машины, согласно изобретению, тяги для управления колёсами сопряжены не с механизмом управления трактором, а с рамой последнего. Вследствие этого работа тяг обусловливается смеш:ением рамы трактора, при его поворотах относительно рамы ходовой части машины, а этим устраняется Перегрузка тракториста при управлении.
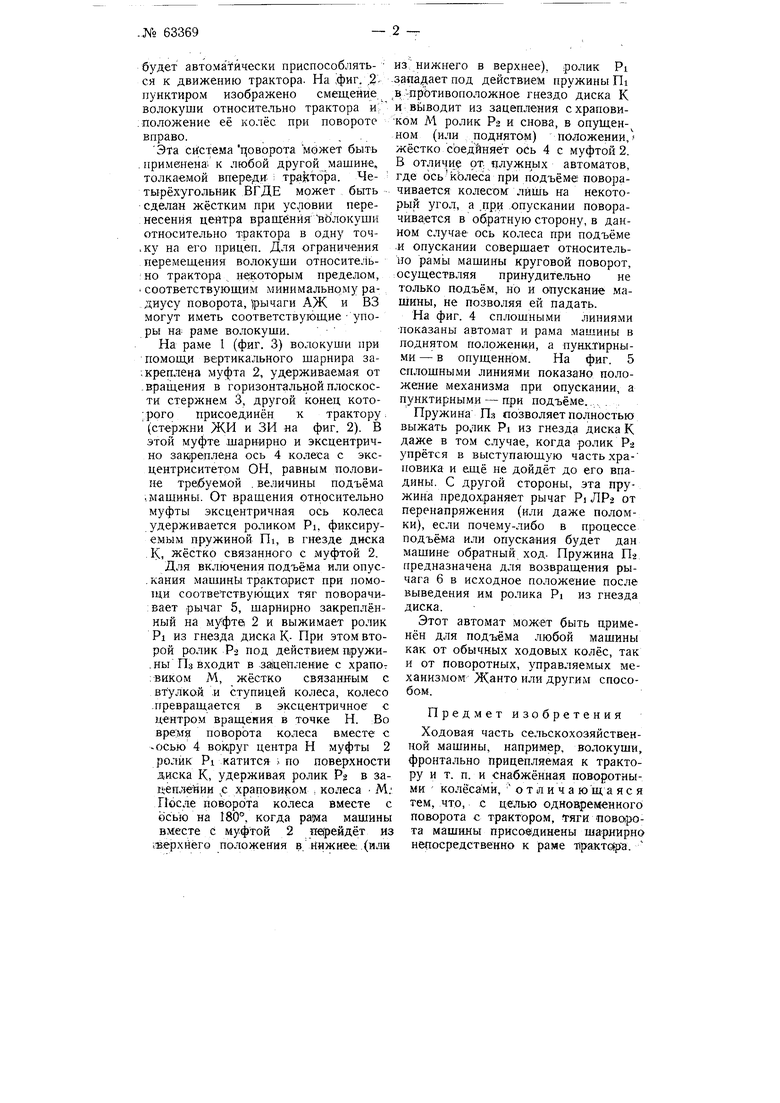
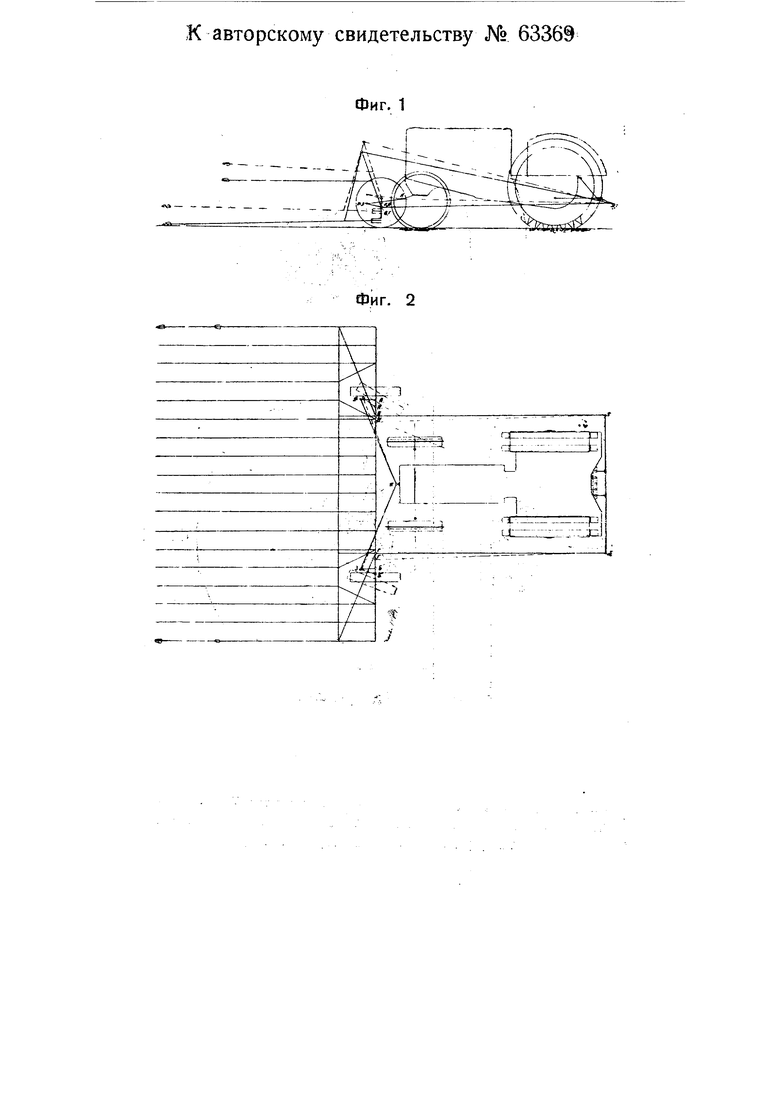
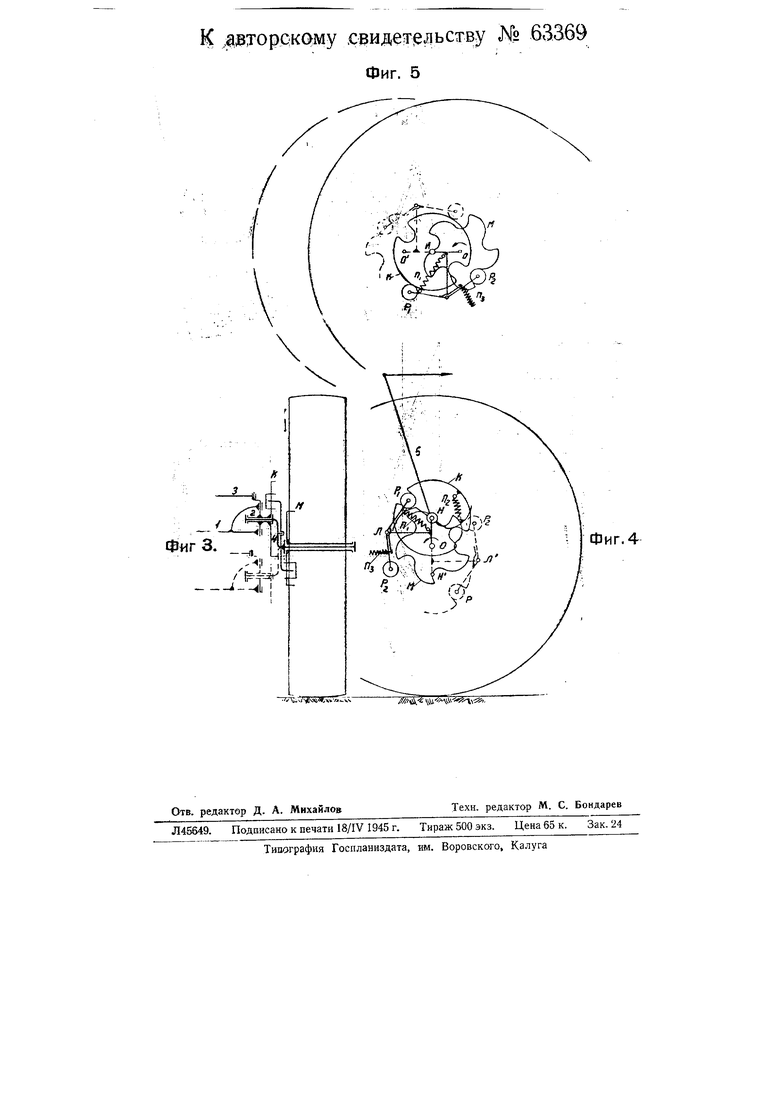
На схематическом чертеже фиг. 1 изображает боковой вид ходовой части машины,с толкакнцим её трактором; фиг. 2- вид той же машины в пладе; ,фиг. 3-вид спереди автомата для,.лодъё)ма рамы машины; фиг.. 4-.боковой вид того же автомат,ау-;-:-фиг. 5-разное положение
элементов автомата при поднимании и опускании рамы.
Волокуша- монтируется на двух колёсах, шарни,рно соединённых с рамой в точках А и Б и имеющих возможность поворачиваться относительно неё вокруг этих вертикаль ных шарниров в горизонтальной плоскости. Толкается волокуша штангами BE и ГД, шарнирно присоединёнными к брусу ЕД, жёстко, закреплённому на тракторе. Колёса волокуши от поворота удерживаются тягами ЖИ и ЗИ, шарнирно-tipHсоединёнными к трактору в точке И и к рычагам АЖ и БЗ, жёстко связанным с осями колёс.
Трактор, поворачиваясь вправо или влево, перемещается относительно воколуши на некоторое расстояние и помощью тяг ИЖ и ИЗповорачивает колёса волокуши настолько, чтобы центр её поворота совпал с центром поворота трактора. Это совпадение будет осуществляться автоматически, так как дотех пор, пока оно не произойдёт, будет продолжаться относительное перемещение трактора и волокуши, которое, в свою очередь, приведёт к ещё большему повороту колёс.
При прямолинейном движении трактора волокуша займёт симметричное относительно его положение. Таким образом движение волокушибудет автоматически приспособляться к движению трактора. На .фиг, .2 пунктиром изображено смещение волокуши относительно трактора и : положение её колёс при повороте вправо.... Эта система доворота может быть . применена; к любой другой машине, толкаемой нпере)ЦИ i тра:ктора. Четырёхугольник ВГДЕ может быть -сделан жёстким при условии перенесения центра вращения волокуши относительно трактора в одну точ.ку на его прицеп. Для ограничения перемещения волокуши относиТель: но трактора некоторым пределом, соответствующим минимальному радиусу поворота, )рычаги АЖ и ВЗ могут иметь соответствующие -упоры на: раме волокуши. На раме 1 (фиг. 3) волокуши при помощи вертикального шарнира за; креплена муфта 2, удерживаемая от . вращения в горизонтальной плоскости стержнем 3, другой конец кото:рого присоединён к трактору: (стержни ЖИ и ЗИ на фиг. 2). В этой муфте .шарнирно и эксцентрично закреплена ось 4 колеса с эксцентриситетом ОН, равным половине требуемой . величины подъёма мащины. От вращения относительно муфты эксцентричная ось колеса удерживается роликом Pi, фиксируемым пружиной Hi, в гнезде диска К, жёстко связанного с муфтой 2. Для включения подъёма или опус. кания машины тракторист при помощи соответствующих тяг поворачи: вает рычаг 5, шарнирно закреплённый на муфтб 2 и выжимает ролик PI из гнезда диска К- При этом второй рОоЧик Ро под действие пружи.ныПз входит в защепление с храпот ;виком М, жёстко связанным с втулкой и ступицей колеса, колесо -превращается в эксцентричное с центром вращения в точке Н. Во вре;мя поворота колеса вместе с -осью 4 BOKipyr центра Н муфты 2 ролик PI катится i по поверхности диска К, удерживая ролик Р в за деплении с храповиком , колеса М После поворота колеса вместе осью на 180°, когда рама мащины вместе с муфтой 2 перейдёт и верхнего положения в/нижнее: .(или з.нижнего в верхнее), ;ролик Pi ападает под действие м пружины Hi -прЬтивоположное гнездо диска К вьшодит из зацепления схраповиом М ролик Рз и снова, в опущеном (шш поднятом) положении, ёстко сЬедйняе т ось 4 с муфтой 2. отличи ОТ: плужн ых автоматов, де оськЬлеса при подъёме поворачивается колесом лишь на некотоый угол, а .цри опускании поворачивается в обратную сторону, в даном случае ось колеса при подъёме и опускании соверщает относительно рамы мащины круговой поворот, осуществляя принудительно не только подъём, но и опускание мащины, не позволяя ей падать. На фиг. 4 сплошными линиями -показаны автомат и рама машины в поднятом положении, а пунктирными - в опущенном. На фиг. 5 сплошными линиями показано положение механизма при опускании, а пунктирными - при подъёме....... . Пружина Пз позволяет полностью выжать ролик PI из гнезда диска К даже в том случае, когда ролик Рз упрётся в выступающую часть храповика и ещё не дойдёт до его впадины. С другой стороны, эта пружина предохраняет рычаг Pi ЛР- от перенапряжения (или даже поломки), если почему-либо в процессе подъё-ма или опускания будет дан машине обратный ход. Пружина П-г предназначена для возвращения рычага 6 в исходное положение после выведения им ролика Pi из гнезда диска. Этот автомат может быть применён для подъёма любой машины как от обычных ходовых колёс, так и от поворотных, управляемых механизмом Жанто или другим способом. Предмет изобретения Ходовая часть сельскохозяйственной машины, например, волокуши, фронтально прицепляемая к трактору и т. п. и снабжённая поворотными колёса ми, отличающаяся тем, что, с целью одноаременного поворота с трактором, тяги поворота машины присоединены шарнирно непосредственно к раме iipaKTofpa.
sa - -
Фиг. 1
..й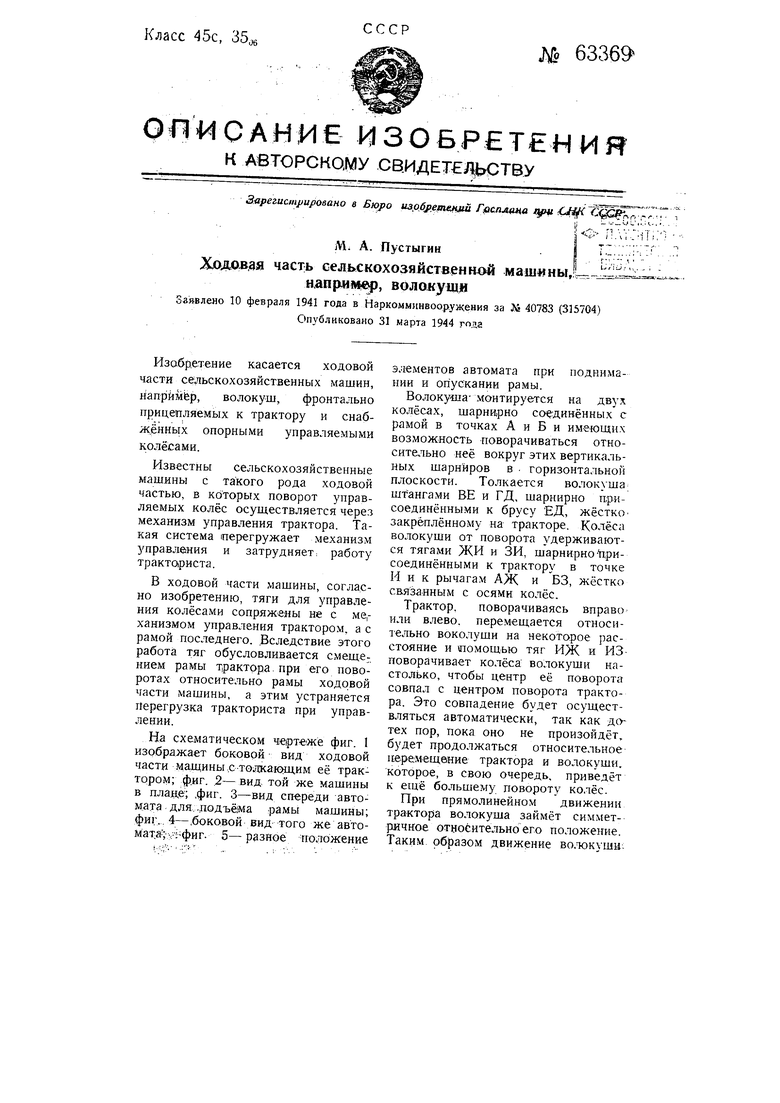
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для механической очистки дверных рам и уборки концов на коксовых печах | 1939 |
|
SU63667A1 |
| Стогомет-стогообразователь | 1960 |
|
SU133378A1 |
| Передвижная машина для бурения отверстий в земле | 1942 |
|
SU63788A1 |
| Колесно-пальцевые грабли | 2023 |
|
RU2810510C1 |
| Машина для подбора из валков измельченной соломы и половы | 1960 |
|
SU132458A1 |
| Подъёмник | 2018 |
|
RU2684808C1 |
| Самосвал с трёхсторонним опрокидыванием кузова | 2018 |
|
RU2710954C1 |
| Устройство для автоматического направления рабочих органов землекопных и тому подобных машин по заданной проектной линии | 1941 |
|
SU63654A1 |
| Высокоподвижный исследовательский планетоход | 2022 |
|
RU2780069C1 |
| Регулятор сцепного веса колёсного трактора | 2024 |
|
RU2836496C1 |
Фиг. 2
П/х.г±
-.„:р1
к ,:горск(му .сэидетельству JSfe 63369 Фиг 3. V ,,ЧVЛ ч
Фиг. 5 м-&, .. Фиг. 4
